Yeah, feel like the Sparkfun offering confuses the matter. This device, part of that product, is a separate serial-to-i2c converter, produced by Benewaake, which would work just fine with any TFMini:
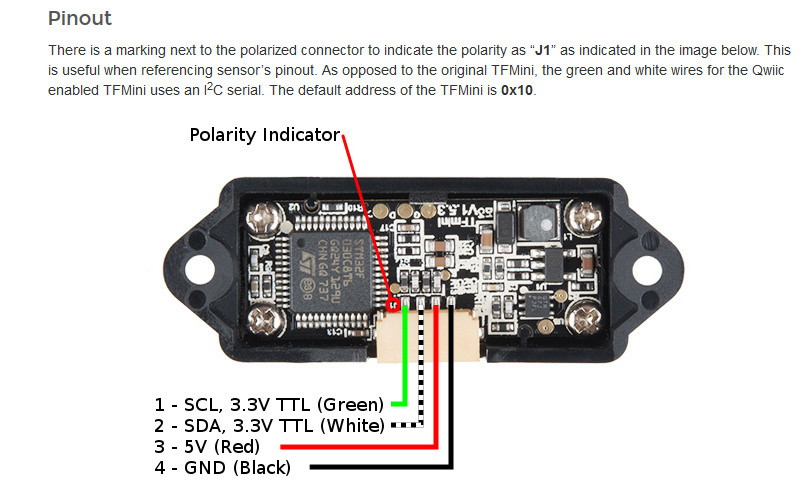
That’s not the same as the circuit in the other image, which appears to show an actual TFMini module that natively supports I2C (which is also what the thread about firmware elsewhere implies).#
My question, basically, is: Is there a separate TFMini module that supports i2c without the “boost” board? If so, where can one get it and other related questions.
Thanks for the clarification Siya. That being the case, a few questions:
If there, or will there be, an i2c version of the TFMini Plus?
Is SparkFun currently the only place stocking the i2c TFMini?
@Shao Yes, TFmini Plus will have I2C version too, it will be ready after some time. Now Sparkfun have the I2C TFmini, other distributor will have it after some time.
New LiDAR TFmini Plus is developed based on TFmini, higher accuracy, higher frequency 1000Hz, IP65 weatherproof case, and can be found on IR-LOCK store:
I have tried this setup exactly as well as rngfnd_type, 20. Is 20 supported on 3.6.6 stable? In either case I only get Bad LiDAR health. I have tried ticking pix mode as well as sending the string of characters using the TFMini Tool. Any Insight?
Hi @lucasdemarchi, great work!
I have no Plus to test, but I tried to get work the TFMini i2c (no plus) version, but for some reason with no luck.
The Plus version seems having different protocol, unfortunately.
What is the reason here to do two transfer() calls instead of single call?
You’re right, just checked TFMini Plus docs. There is a 100ms delay also required between W-stop and R-start.
The i2c protocol between not-plus and plus version is very different. Not-plus instead requires for a restart condition after command sent. Looks like FW for plus and not-plus was developed by different teams))