For a past few days I’ve been working to get current (amps) telemetry on my first Plane build.
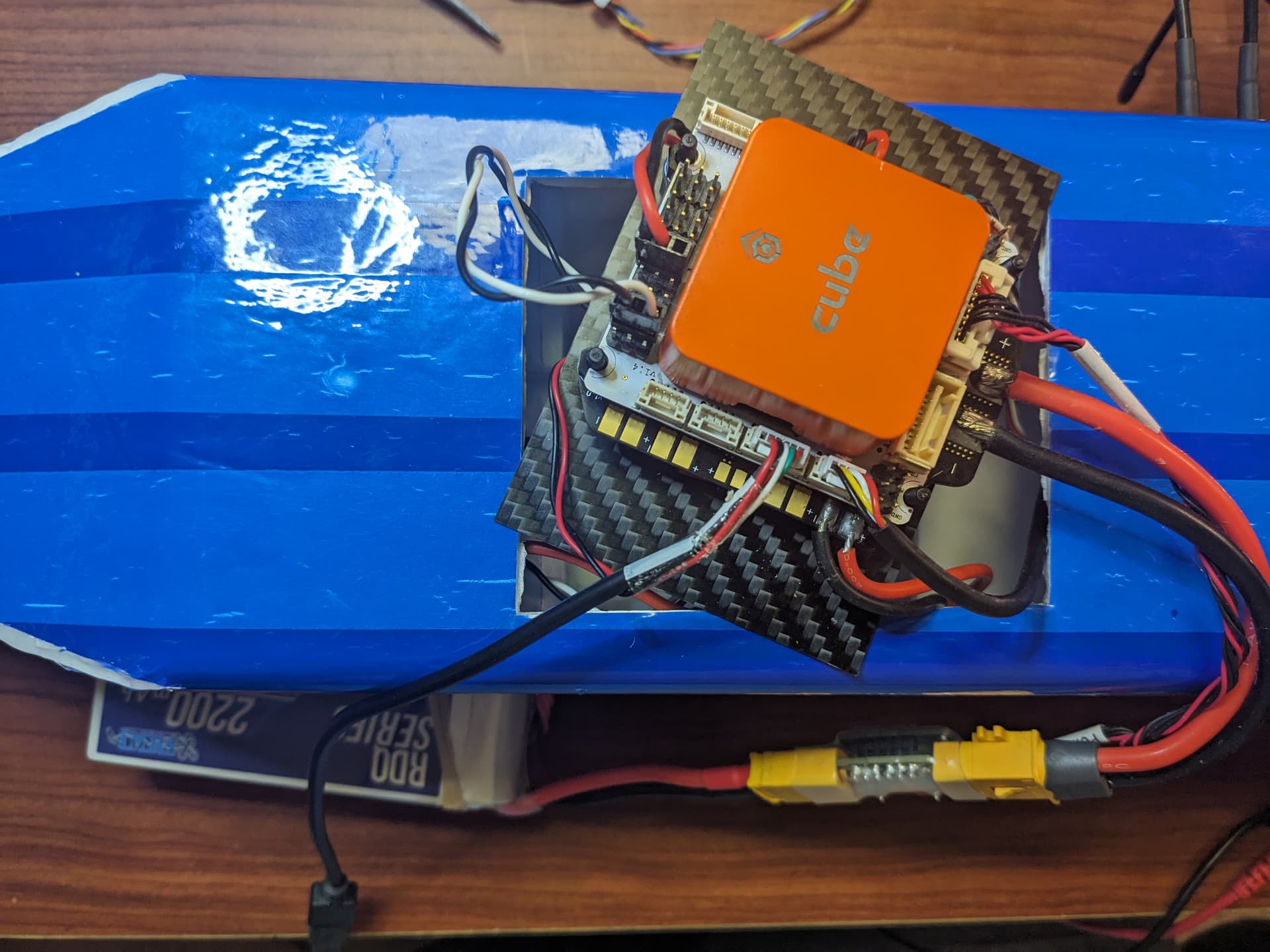
I’m using an Orange Cube, AirBot Mini Carrier Board, Mini Power Brick.
I setup the battery monitor as I had on my Copter builds using the Mini Power Brick:
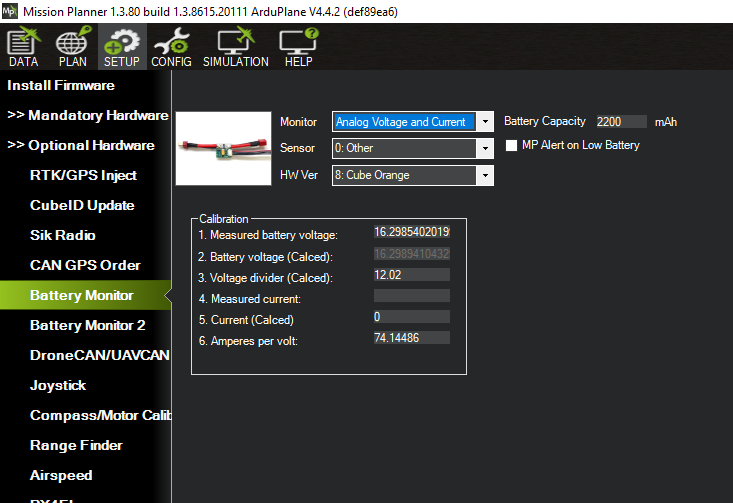
When selecting “Analog Voltage and Current” various other BATT parameters are automatically populated.
For some reason, BATT_AMP_OFFSET was not set - and remained at 0. On my Copter builds, this parameter was set to -0.007. I’m not sure what set this - either Copter or Mission Planner. But on setting up Plane, it wasn’t set, and remained at 0.
As a result, all the telemetry for current was zero. I tried running up the motor to test drawing more current - again nothing.
Comparing the parameters on my Copter builds using the Mini Power Brick, I noticed that they had BATT_AMP_OFFSET=-0.007. It was zero on my Plane parameters.
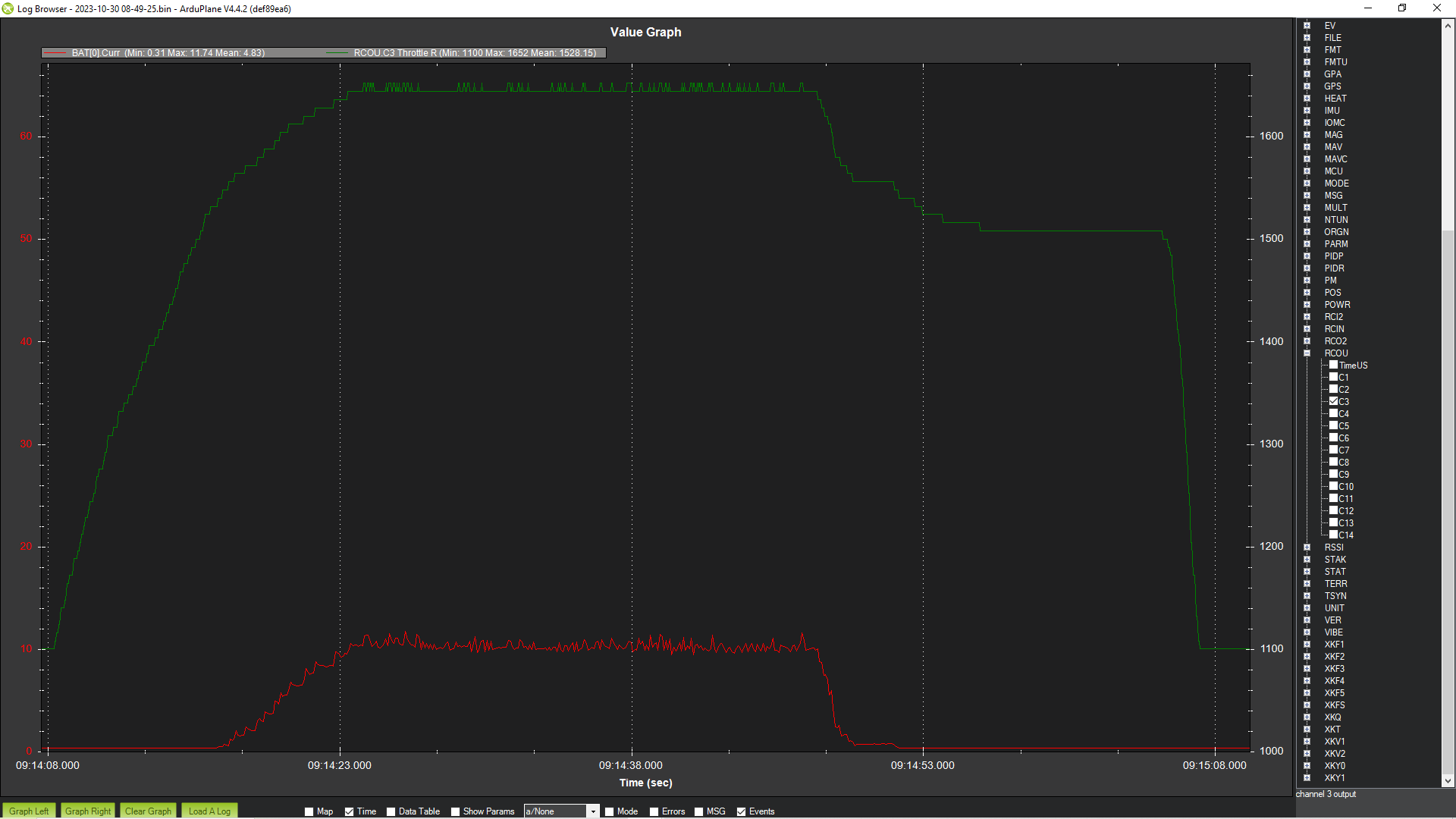
By setting BATT_AMP_OFFSET=-0.007 the telemetry now reads 0.5 amps with the electronics/motor at idle. And I now get current telemetry when running the motor - but only with a prop attached to increase the current load.
It turns out that the resolution of the Mini Power Brick is too poor to report low levels of current. I remember reading about this when learning Copter - but with four motors, the current was always high enough. It seems with a single motor on a fixed-wing, I may need an more sensitive current sensor.
To illustrate - I graphed the throttle position (PWM) against the current (amps) when running up the motor with the prop on:
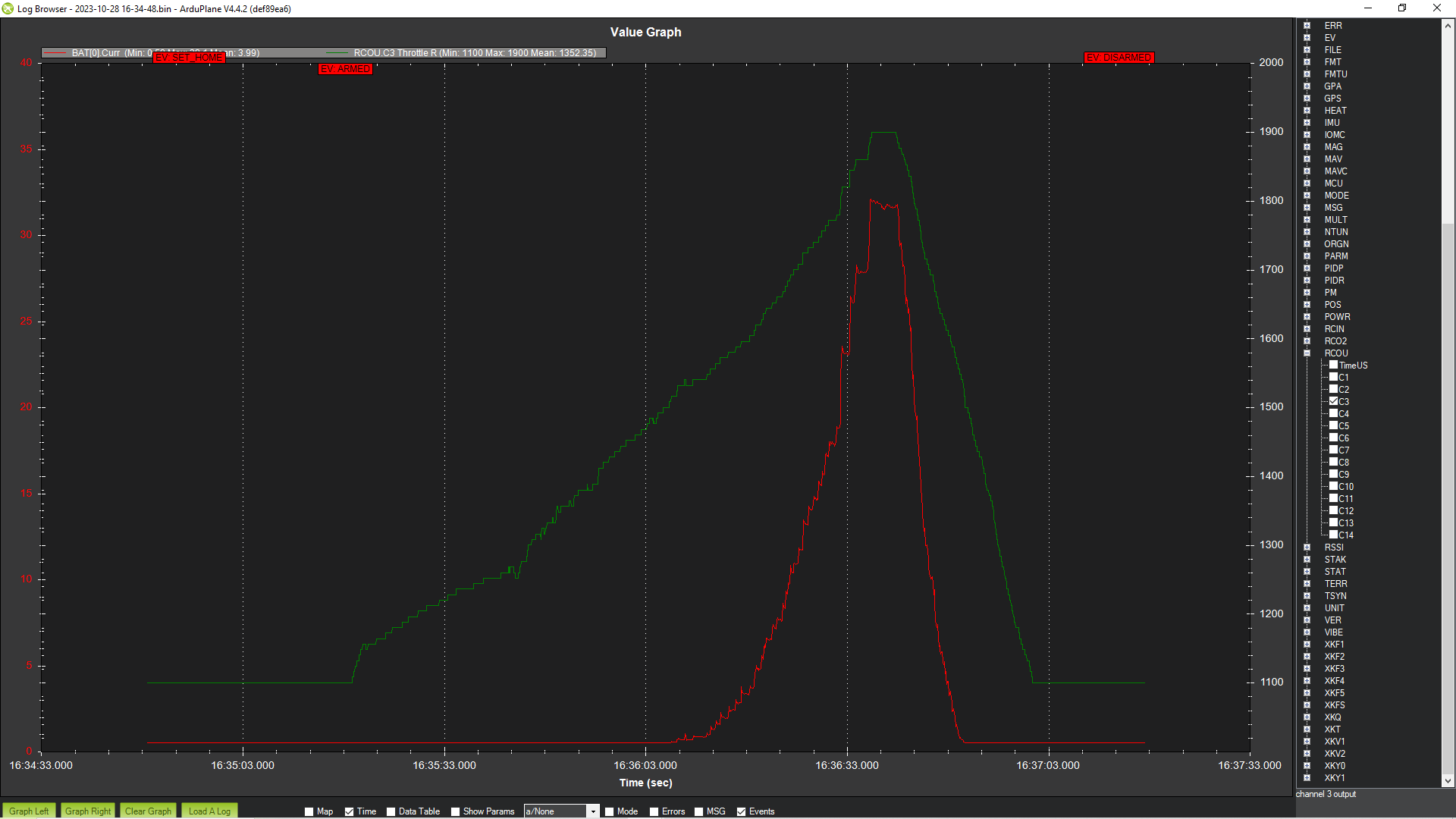
Until the ESC receives a PWM signal of about 1450, no current is reported.
I suspect that had I done the test running the motor with the prop on before setting BATT_AMP_OFFSET=-0.007 some current would have been reported at high throttle.
In the Parameter List this the BATT_AMP_OFFSET is mentioned - but I can’t find any information on how to set it properly. I would think that it’s a value that should be offered by the current sensor manufacturer, but I don’t even recall mention of it with my MAUCH sensors.
It would be interesting to know why and how the BATT_AMP_OFFSET parameter got set on my Copter builds. And why it didn’t on Plane.
And if the wiki has information on how to properly set BATT_AMP_OFFSET I need to go back and study that. For now, BATT_AMP_OFFSET=-0.007 produced telemetry - but I have no idea if it’s correct. As I recall, the wiki guides setting BATT_AMP_PERVLT when calibrating current sensors, but I don’t recall reading a mention of BATT_AMP_OFFSET.