Hi all,
I need some help with tuning a small quad (X, 920kv, 9.5’’, AUW incl payload: 1.300g, 4S 6500mAh, AC3.5, EKF3, BlHeli, OneShot). It is a little overpowered (MOT_THST_HOVER = 0.235) and the battery is mounted in front-back direction, so it should be easier for the copter to roll comapred to pitch.
The first problem is that Autotune failed in several tests to tune the Roll axis. Autotuning finishes successfully but the copter is not flyable.
All Roll values are 1/2 or 1/3 of the pitch values:
ATC_ACCEL_P_MAX 111951.5
ATC_ACCEL_R_MAX 56937.1
ATC_ANG_PIT_P 18
ATC_ANG_RLL_P 6.452277
ATC_RAT_PIT_D 0.002601937
ATC_RAT_PIT_I 0.03337713
ATC_RAT_PIT_P 0.03337713
ATC_RAT_RLL_D 0.001315915
ATC_RAT_RLL_I 0.01605497
ATC_RAT_RLL_P 0.01605497
If I set the Roll PIDs to the Pitch PIDs it flies (relatively) fine. If not the roll axis reacts much to slow, which is mainly due to the low ATC_ACCEL_R_MAX, and which is dangerous.
Since this is reproducible, I am wondering if there is some other parameter to adjust. It seems obvious that the Roll values should be lower regarding to how the battery is mounted. [OT: most GCS complain if I try to set the Roll setting to the Pitch settings because they are out of range. QGroundControl on Android refuses it completely.]
Some screenshots and logs:
The failed autotune log: AT_2017-07-21_16-31-47.bin
The following log and screenshot show the effect of the failed Autotune: ATres_2017-07-21_2016-42-37.bin
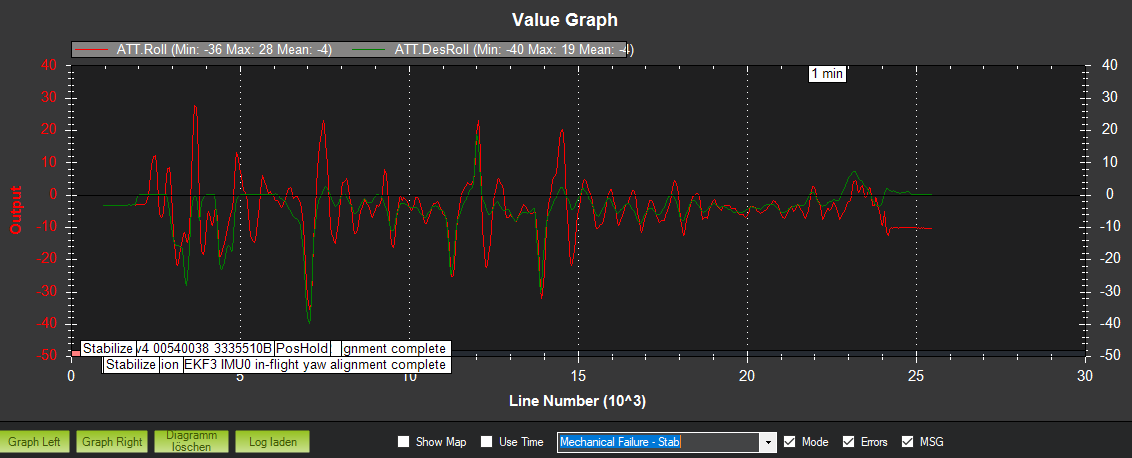
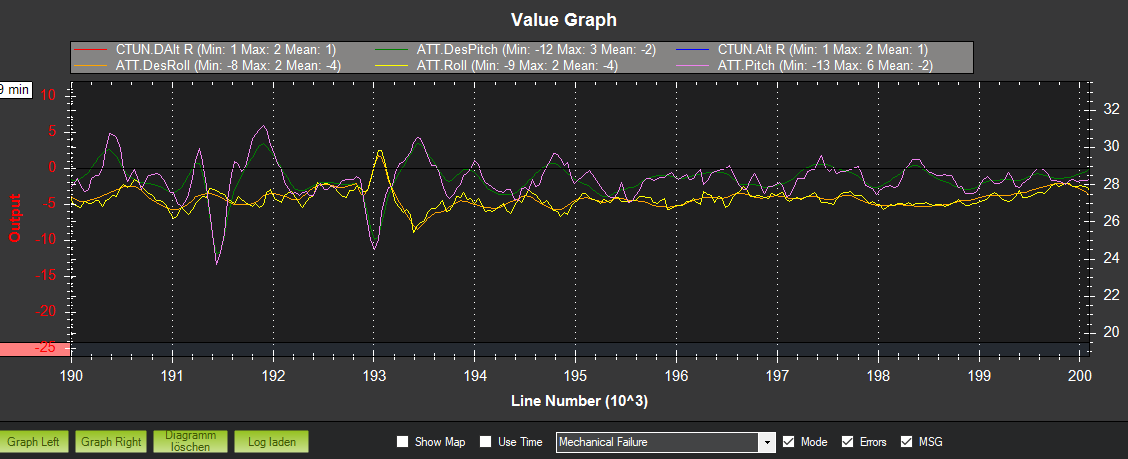
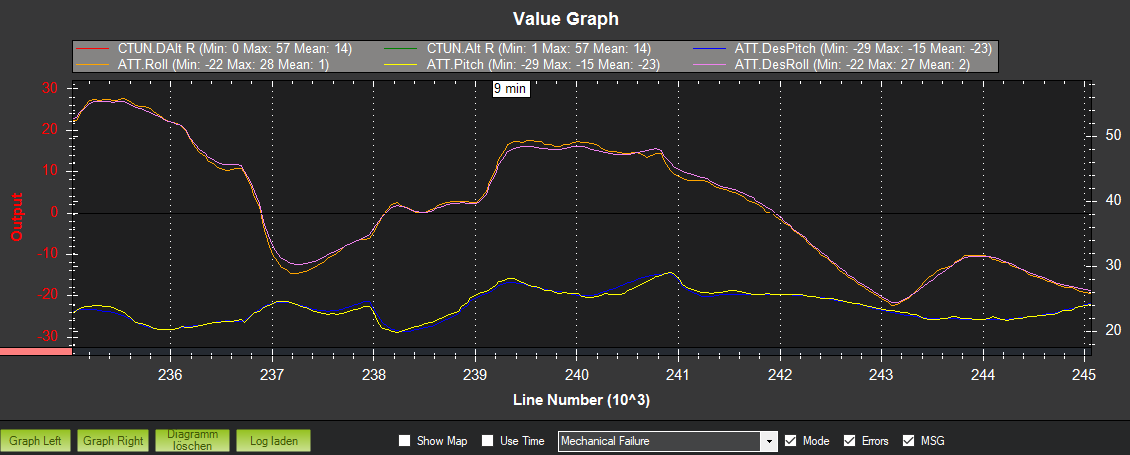
The next problem is that the copter is a little noisy/nervous on pitch and roll. I am not referring to RC_FEEL_RP but the difference between Pitch and DesPitch as well as Roll and DesRoll. It can be seen in this log: ATcorr_2017-07-21_16-53-20.bin with adjusted PIDs for Roll based on Pitch tune. I assume it is a tuning issue, because the Vibes are low (Vibration 3.3 are < 20 at full speed, < 10 normally and < 6 in Loiter)
Compared to that, a bigger hexa (15’’, 4S, AC3.5, EKF2) looks much much better (however it also has very high ATC_ANG_PIT_P/R values, 17 to 18, which are out of range according to the GCS).
In summary four questions:
Autotune:
Why does Autotune fail on this copter?
What should I try with respect to chaning some settings (copter, ESC)?
Noise:
Is this an (auto)tuning issue or is this the cause for the failed tunes?
If it is related to tuning what manual changes in the PIDs do you recommend to test, if not what might be the cause?
Thanks a lot!!!
Cheers,
Thorsten
