New experimental experiments:
-Two RTK GPS’s on car.
-Tests on RTK station.
-Swarming.
Two RTK GPS’s on car.
Having got another XL RTK GPS for mounting an offroad rover, I first tested it as a second GPS on actual car. At the same time, reference station was improved (Glonass added on a mount point, and perhaps something else).
Recall that on post 37 july 2 above I had problems with a single GPS (conventional), with no clear reason.
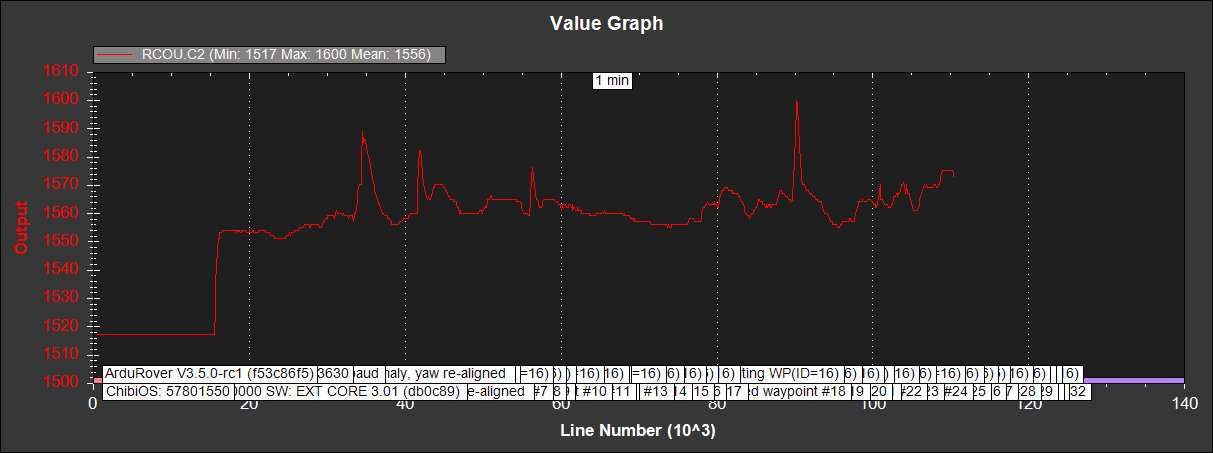
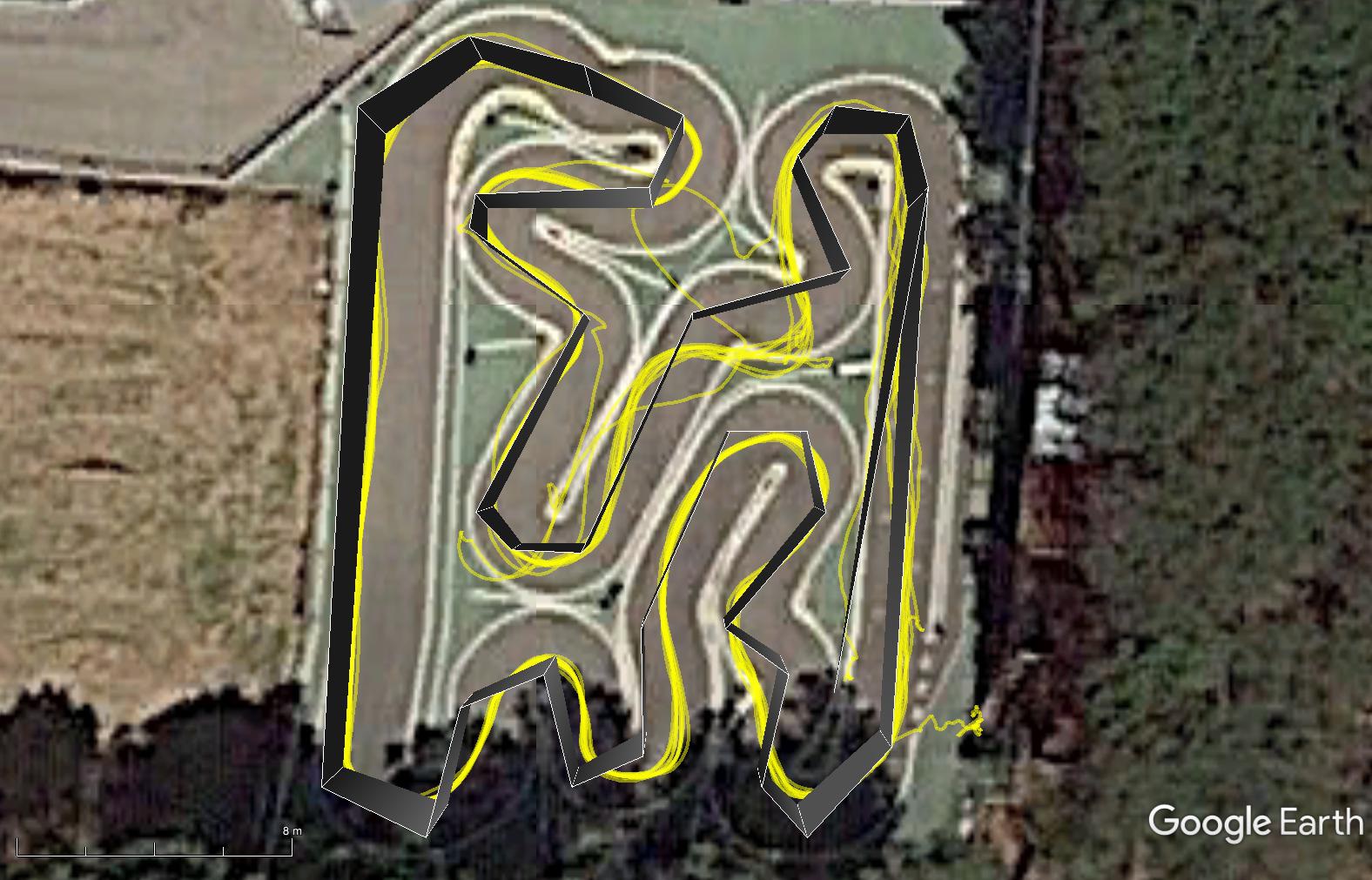
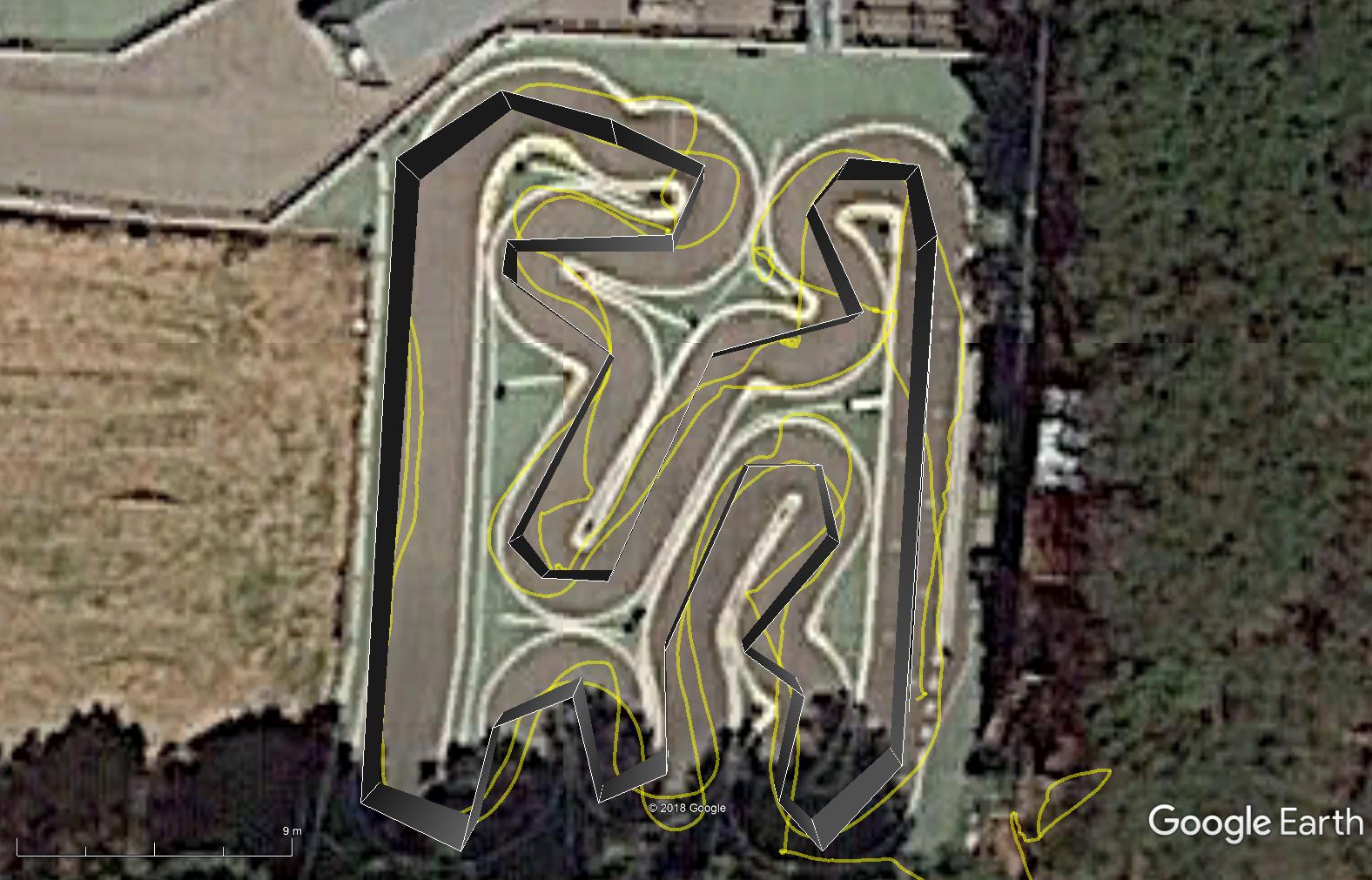
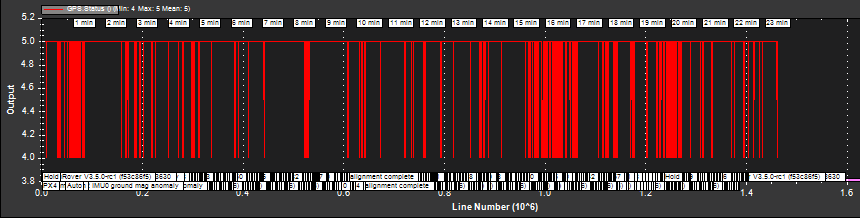
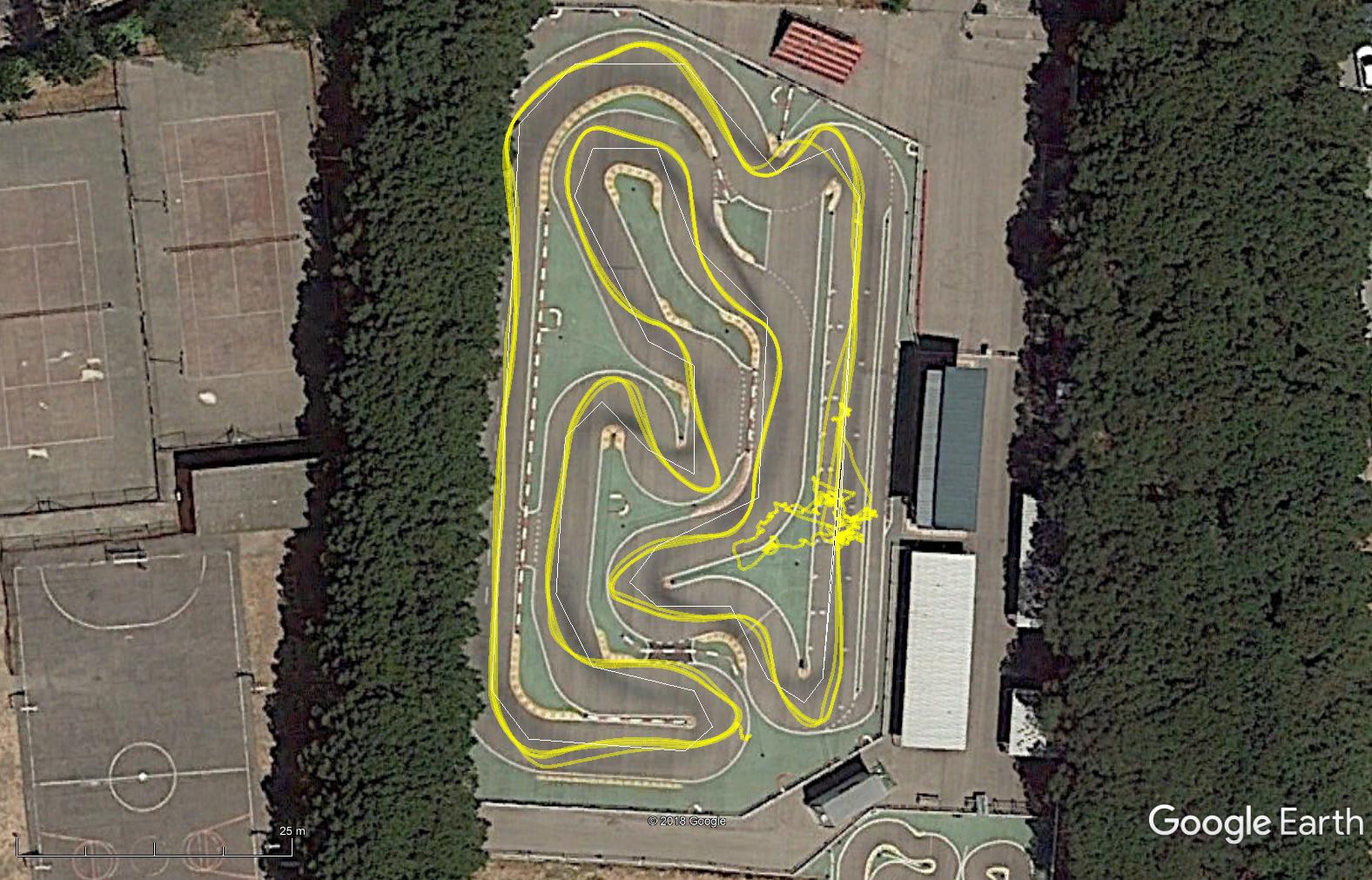
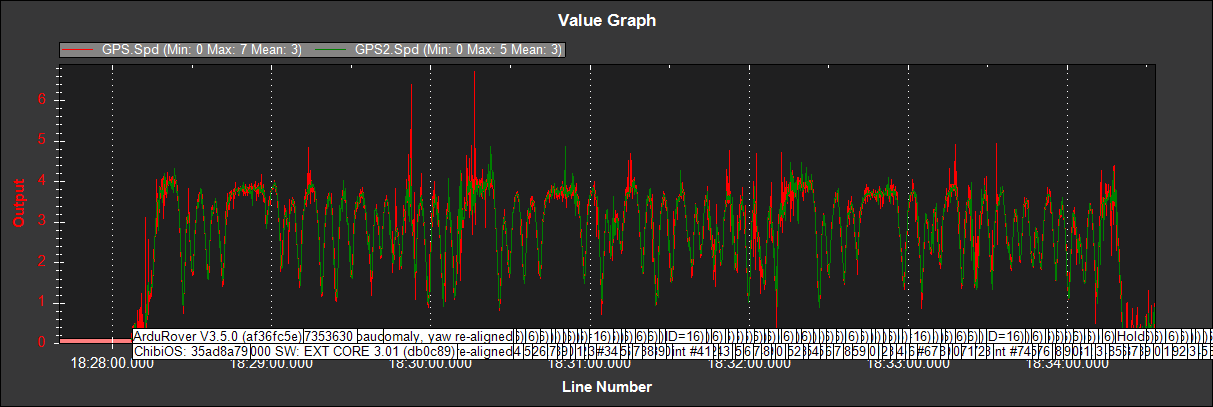
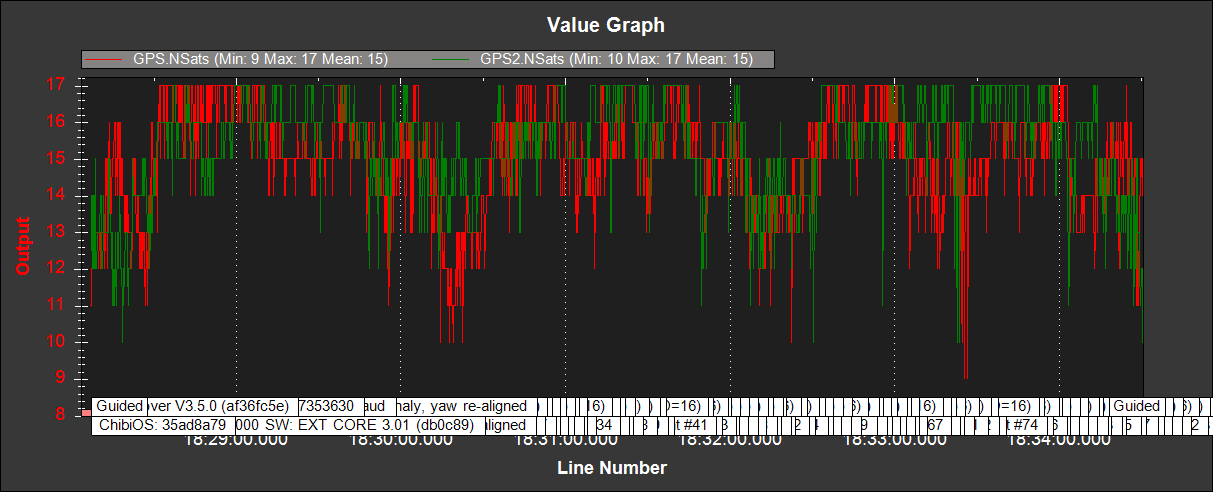
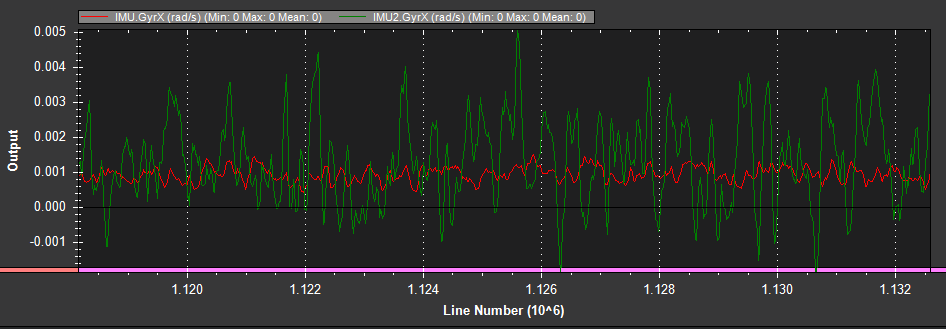
These are the results with two mount points (good and almost equal) on the 2m wide circuit at 1.3m/s:
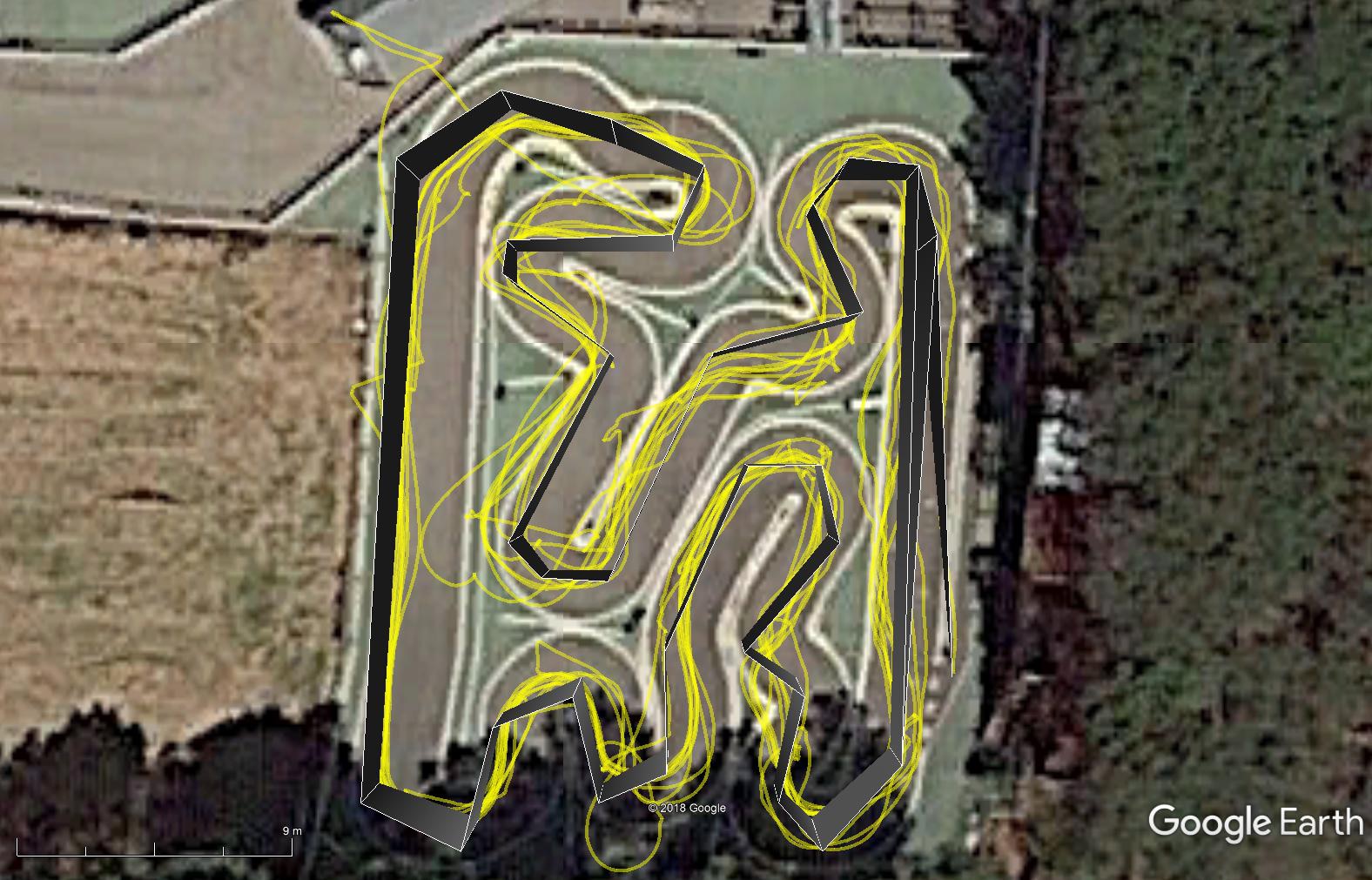
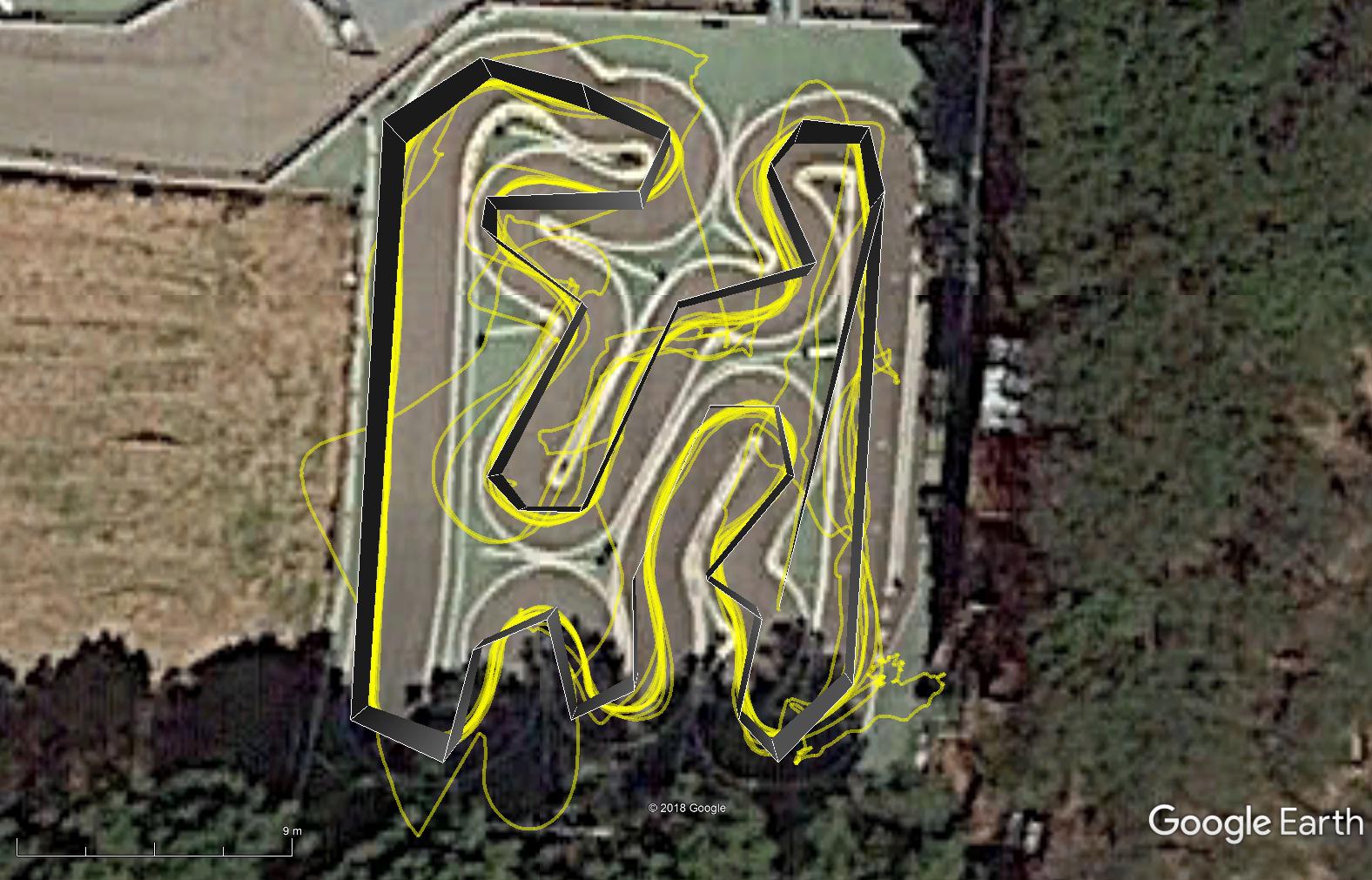
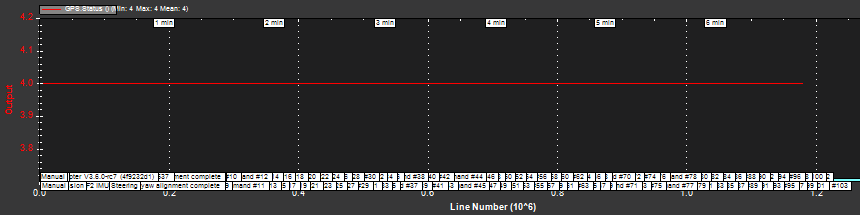
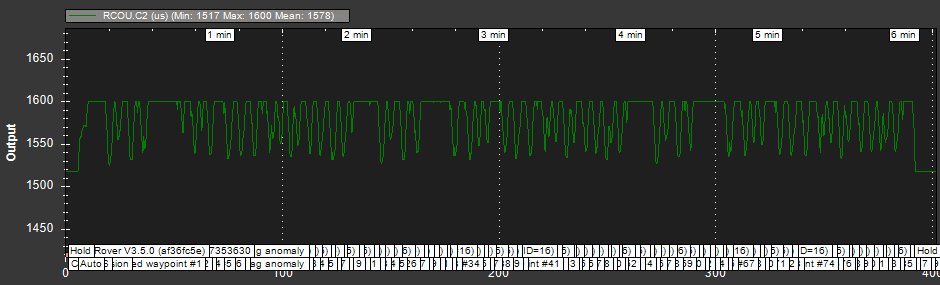
With these good results I tried at 1.6m/s:
It is clear that speed was too big. The car had to be repositioned many times.
Tests on RTK station.
Better than trying on a place closer to the RTK station, I tried on the RTK station helped by two people working there, who were very kind and showed great interest on these experimental experiments, with both RTK GPS’s on the car.
The reference point appearing on Mission Planner is at the white dome on the center of the photo. I tested the car on a rooftop moreless 40m from it.
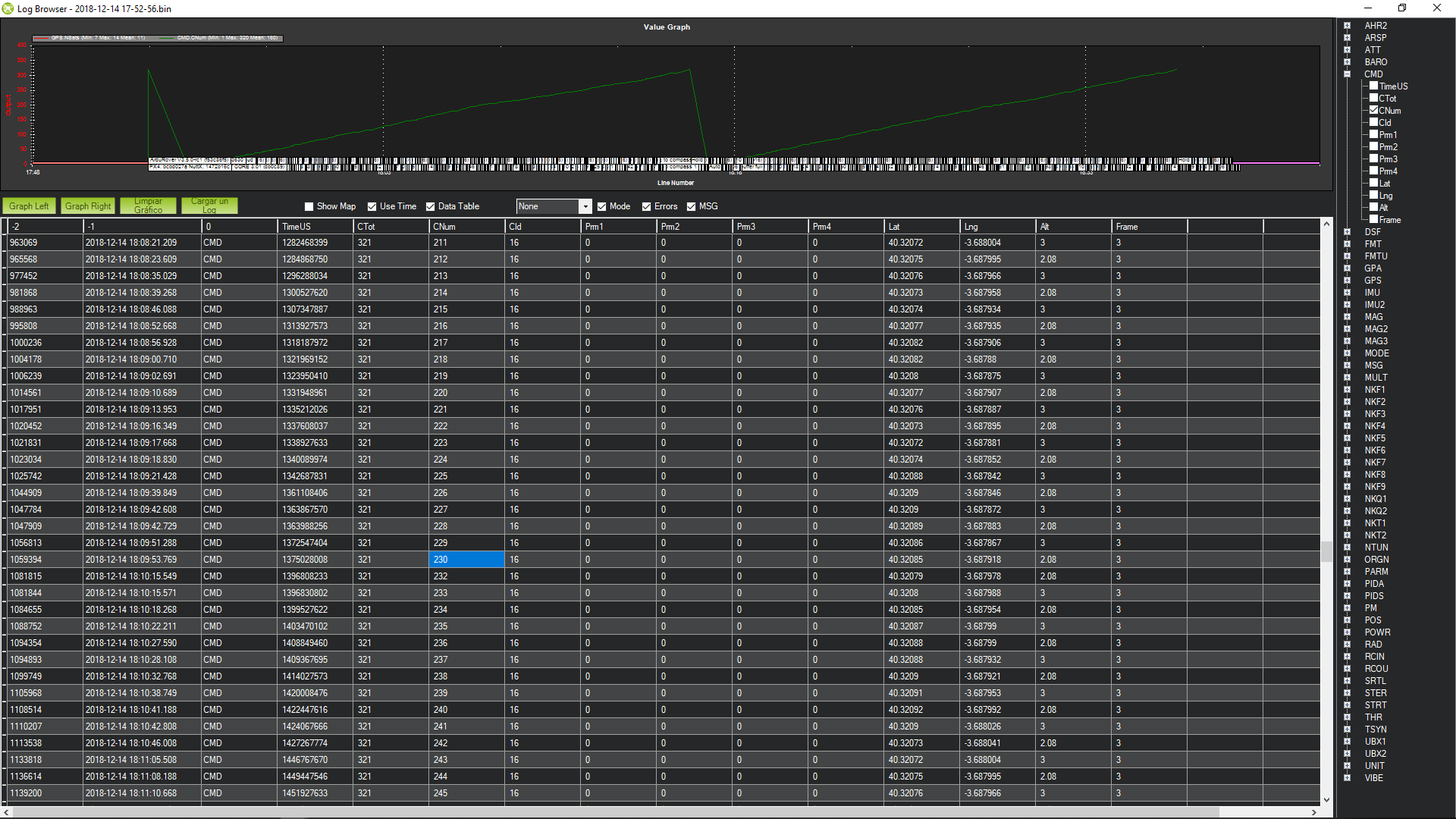
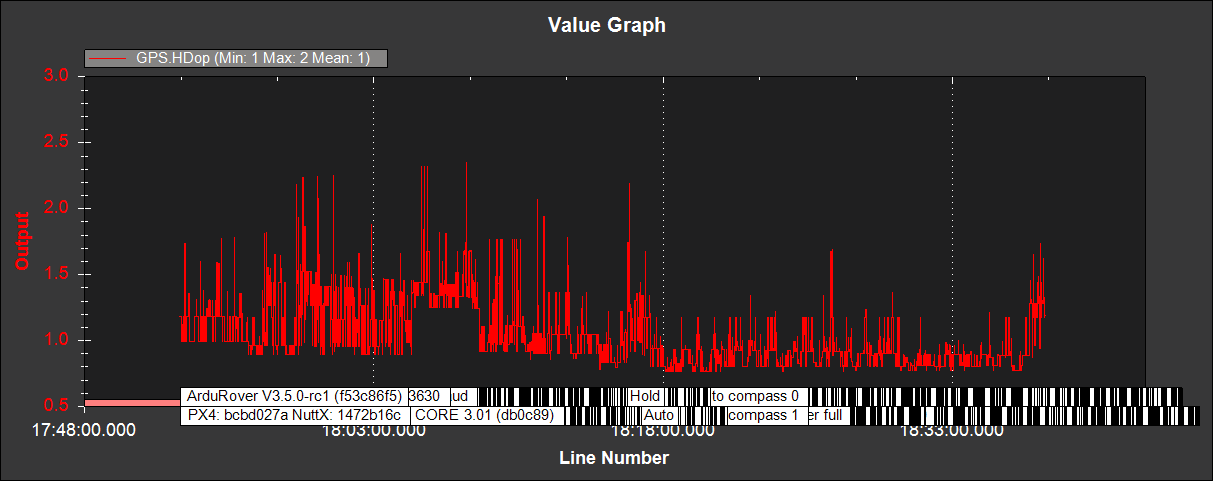
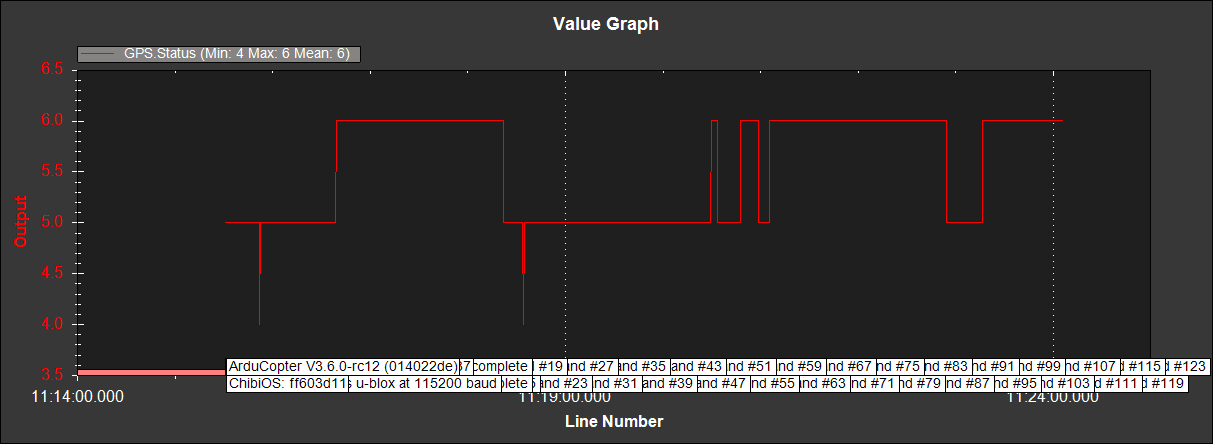
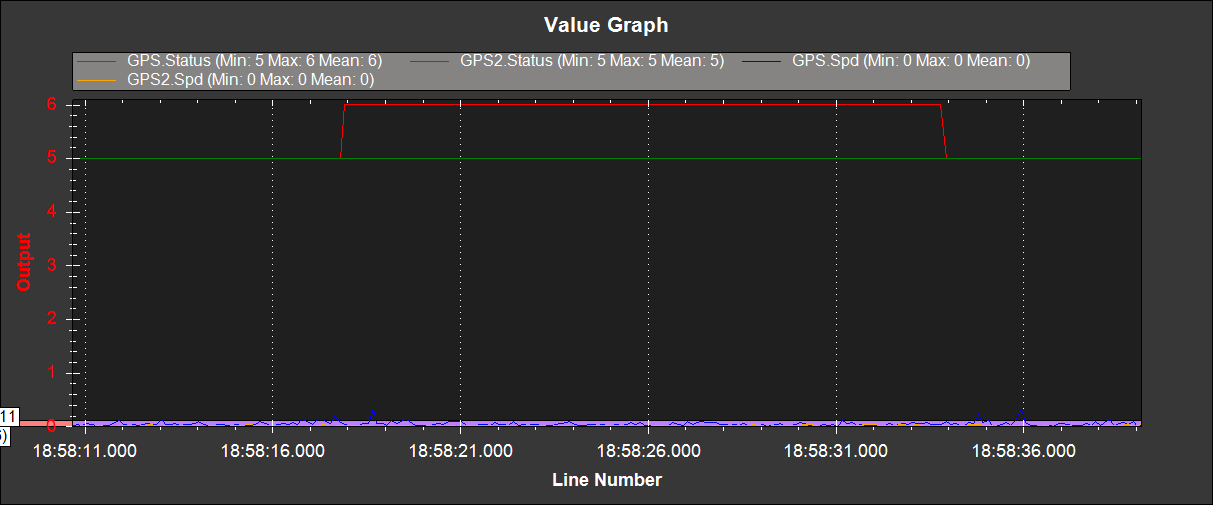
Results were not so good, but this was a first contact:
-RTK fixed (status 6) was difficult to get.
-Fewer satellites than at the circuit.
-The new RTK GPS was on RTK fixed more often than the old one, and with its logs more stable.
-The expensive GPS instruments they had were affected by the 433MHz 3DR antennas. A final test was done without these antennas, with the Pixhawk connected to the laptop with an USB cable, and the car quiet.
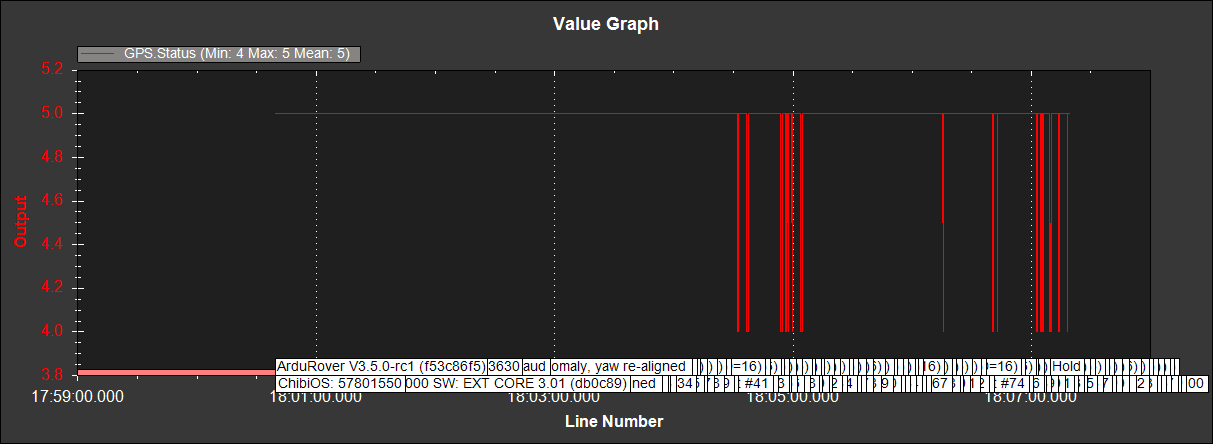
Later I saw that from a previous test I had GPS_MIN_ELEV = -60, so for a next test I will leave the default value. This next test will be a mission at moreless 1m/s, since, although there was not too much space, I could drive the car:
This is the tlog video:
Swarming.
I have added to simultaneous copter rover mission video (post 57 august 22) above the tlog videos:
Unfortunately:
-the copter lost waypoints (irregular waypoints joining);
-the antennas on car and drone were horizontal (this will be changed), and communication was lost at times.
Instead of having a common mission on drone and car, and start each one independently (first car, next drone) I plan to try swarming with car being the leader and drone the follower. I don’t know if this can be done, and if the drone will follow the car being it at 0m height (perhaps offset when “Update Pos” button is pressed, with drone above car, would be maintained).
So I asked this on:
Swarming with Mission Planner
Response: the Empty Set ø.
Empty Set ø (Wikipedia)