You don’t need the Teensy if you’re using ArduPilot; it’s only if you’re using the PX4 Autopilot stack/firmware. You’ll need to use the Yaapu Telemetry Cable.
Good luck.
You don’t need the Teensy if you’re using ArduPilot; it’s only if you’re using the PX4 Autopilot stack/firmware. You’ll need to use the Yaapu Telemetry Cable.
Good luck.
I have started a new attempt to update my Taranis X9D+SE 2019 to OTX 2.3.9 and updating the ISRM transmitter and RXSR to ACCESS 2.1.0
I don’t get Taranis 1.8 telemetry to work after the update … no telemetry data.
So still the same as here at my 1st attempt here: An Open Source Frsky Telemetry Script for the Horus X10,X12 and Taranis X9D,X9E and QX7 radios
Should this work in principle or is there a problem with ACCESS 2.1?
OK, I got it to work.
Had to register/bind the RXSR again and then switching the RXSR from FPORT to SPORT as described in the “How to about ACCESS receiver” document on the FrSky RXSR download page.
Hi Rainer, did you have to switch from fport to sport because it did not work in fport mode or because sport was your target wiring?
After updating to ACCESS 2.1 the RXSR was in FPORT mode.
I think FPORT is supported with future 4.1. release and later.
My copter is running the official 4.0.3 release, which doesn’t support FPORT yet, I think.
So I had to use SPORT.
I have made the “some soldering required” adapter and its working great on Frsky D4R-II Rx and Yaapu 1.8.0 LUA script on my X9D otx v2.2.2. I now want to add battery voltage. If I add analog voltage sensor (couple resistors/cap) to D4R-II analog port. Will this method show up on the yaapu telemetry screen for total battery voltage?
Hi, nope, the analog port used to be supported as a voltage source but not anymore, sorry 
Nobody used it and support did eat some memory so I removed it
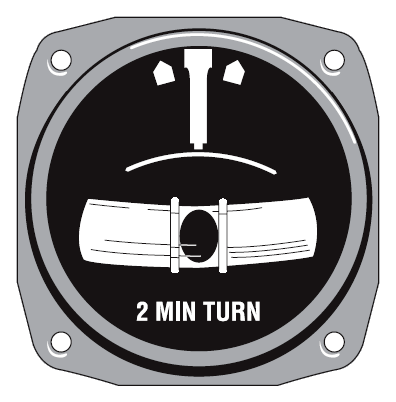
Can this script display lateral acceleration along with pitch and roll? This would be similar to a turn-and-slip coordinator in a full-size airplane. My use case is tuning the yaw dampner and sideslip controller. If the ball stays in the middle, I know they work correctly.
Thanks for the reply Yaapu.
The Frsky Rx analog input is 0V to 3.3V, do you know if its the same for the PixHawk?
Hi, Pixhawk1 has both 3.3 and 6.6 ADC input ports.
Hi, no that information is not available. There’s no Accel telemetry in the passthrough protocol and even if it was there that instrument would require a rather complex implementation to be simulated in software.
Thanks, @yaapu. Too bad. It’s available in Mission Planner telemetry, so I thought it could be here as well. For the ball part, the software would only need to move a sprite left and right proportionate to the acceleration.
Ari.
…mhmm, the ball does not respond to lateral accel alone, I think that a more complex model would be required, the ball does not move on proper turn with no skid…
Exactly! In a coordinated turn, without slip or skid, lateral acceleration is 0 and the ball stays in the middle. The physical instrument is a curved glass tube. The curve of the tube determines how far the ball moves for a given acceleration. This is similar to a carpenter’s bubble level. In software, you don’t need the curve–you simply have a constant by which you multiply the acceleration.
None of this matters of course if the data are unavailable.
Ari.
WOW Excellent project, thanks a lot, I will try it on the TX16S 
Doe this impliy that the response is not linear wih lateral acceleration?
In a “perfect” coordinated turn at constant speed the vehicle should experience only vertical (centrifugal) accel, correct?
None of this matters of course if the data are unavailable.
It’s not there yet, but it coud be added if needed
Excellent work, love it…
Trying to connect my FrSKY Taranis with Pixhawk with R-XSR and elechawk telemetry cable in between …
using FrSKY s-port pass trough … not working …
Enabled S-port on the receiver setup (ACCESS)
Do i need to change baud rate an any other serial option ?
Ideally, the response would be linear, but the limitation of implementing the instrument as a spirit bubble make it non-linear. The bubble is like a pendulum, and the pilot is reading the lateral displacement of the weight. But the very narrow measurement range means that the lateral displacement is almost linear with lateral acceleration: for small values of a, sin(a)~=a.
In summary: (1) the ideal instrument would be linear; (2) the physical ball is very close to linear.
Exactly! This is what it means to coordinate roll and yaw in a turn.
Bob Hoover used to do this trick where he would perform a fully-coordinated barrel roll, and pour a glass of tea while rolling. In his perfectly-coordinated turn, lateral acceleration was zero, and none of the tea spilled.

Ari.
Just wanted to point out that not just fully coordinated but maintained just enough pitch control for 1G thoughout the maneuver.
Did he even need to use the rudder for that maneuver?