PX4 is not supported, this is for Ardupilot only! You might try following this tutorial as a workaround.
Oh my God now I understand all. Thank you!
Hi Alex,
I would love to get this script working on my Radiomaster tx16s for Arducopter.
Only problem I see is that it uses Frsky telemetry.
I’m using Crossfire exclusively, I have a fullsize crossfire in the back of the openTX transmitter that is recieving mavlink telemetry.
I can now connect with a groundtation over bluetooth with the module, but thinking about it…
There must somehow be a way to do the conversion of the mavlink telemetry at the transmitter end.
Do you know of a way to get your script working this way?
I’ve seen the Mav2Passthru script and see that it works with dragonlink, but I’m a bit puzzled how this all works 
Where do I start?
Hi Peter, I’m not a crossfire expert so you’ll have to double check what I say 
If you have bluetooth on your crossfire you can connect to and esp32 running the MavToPT firmware and have WiFi + passthrough. The problem as I understand it is that the TBS module plugs in the back of your radiomaster and already utilizies the sport pin which will prevent you from connecting the esp32 to it, on the MavToPT discuss thread and rcgroups thread there’s plenty of info about all this so you should really ask there!
@andyp1per recentely added CRSF RC + telemetry protocol support so in the future I might support it in my script,
good luck
1 Like
Thanx a lot for the info Alex!
I did not know there was a mavToPT thread, so will also ask there.
One other thing I was thinking about… the crossfire reciever supports serial passthrough.
So maybe you can just connectthat to a port on the FC set to Frsky telemetry and pass it to the reciever.
You may look here: Mavlink to FrSky S.Port Passthru Converter for LRS or PX4 Pro
That‘s a short description how to use mav2pt, yaapu and Crossfire together.
1 Like
Greetings, is there a way to display custom sensor data in the Yaapu screen on a Horus x10s? We have a lightware LW20 rangefinder hooked up to telemetry port 2 (serial) on a pixhawk cube 2.1 blue. I can see the value of “sonar range” in Mission Planner, but would like to be able to see the distance to ground on the Horus controller. Will this require custom coding?
Hi, rangefinder should be supported provided is facing down.
Go to the yaapu configuration menu and set your rangefinder max distance, this will enable rangefinder display where you would normally see GPS altitude (top left), sensor label should change to Range
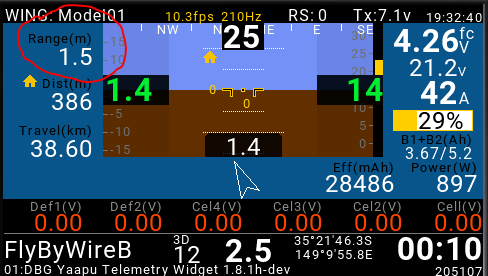
Thanks Alex for the quick reply! I set this to 10000 cm (max range provided by Lightware. On my bench Mission Planner is showing 0.54 m but Range (m) on the Horus shows 0.0. I have gone in and tried to search for new sensors, but it did not find one named sonar, range, lidar, etc.

for reference we are using sbus passthrough from the Horus --> X8R --> teensy 3.2 --> RFD 900x for telemetry passthrough…
ok this changes everything.
I did test Eric’s MavToPT with a rangefinder a while ago and it was working, what you need now is a tlog to post on Eric’s thread.
The rangefinder frsky packet is 0x5006, what you need to make sure is that the current MavToPT version still supports that packet type.
i have test it its working fine on TXmod with Eric’s MavToPT and i have tested it with a Teensy 3.2 as well
i am using Lightware LW20/C on the serial
if your using it on I2C thats an ardupilot issue the address try changing the I2C address of lightware
i give up try on the i2c port
been using serial for years now

Hi Alex hope all is well in your end of the world
just question can we set flight controller voltage its all ways 1 volt out 3.0 on the TX and mission planer says 4.91 i have tested voltage at the pixhawk 5.1
Hi Colin, 3.90V is not the flight controller voltage but the (average) cell voltage (11.7 / number of detected cells), right now I do not display the flight controller voltage.
The FC next to the 3.90v means that the voltage source is the ardupilot batt monitor whereas a VS next to it would mean voltage source is a frsky sensor like FLVSS or MLVSS
Tar may be next time i will read the docs LoL Thanks Buddy
LOL no worries, next time I will politely explain it one more time
@FIT-RS looking at your screenshot looks like you’re using PX4!
@yak-54 and myself tested rangefinder support on ardupilot only
Nope, we are using ardupilot firmwate and mission planner software. Stillbhave not gotten back to this yet…
Your screenshot shows the PosCTL flight mode which is a PX4 only mode, that’s the reason I asked.
Is it possible to customise the telemetry view layout at all? It would be nice to rearrange what’s being shown to account for variations in airframe and control setup.