I’d like to tell that it is possible to use your wonderful mav2pt solution, together with TBS Crossfire, for displaying the telemetry with the yaapu lua script (and of course relaying the mavlink to wifi as well). I’m using a ESP32 dev module for that task.

What works (for me):
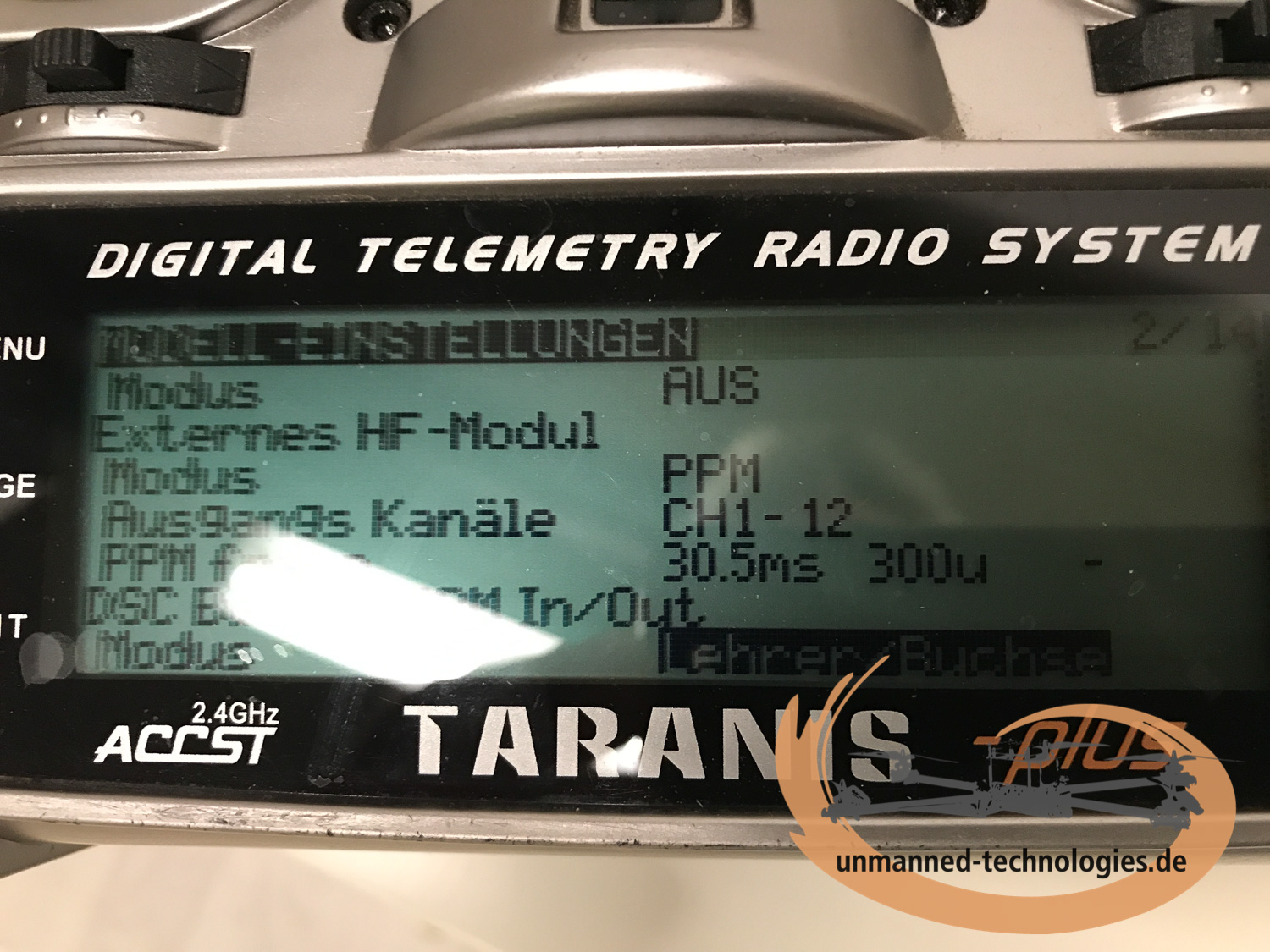
- TBS Crossfire (only the full size TX with Bluetooth) on Taranis with 12 Channels
- All telemetry values for the yapuu
- Routing of mavlink with udp
- The ESP32 fits into a (in my case) old TBS JR slot case, or you can use an 3D printed one (thingiverse is your friend)
What does no longer work:
- All special CSFR functions, like the CrossfireLUA scripts. But for me this doesn’t matter.

Used hardware:
- Just a ESP32 Dev module, like https://www.az-delivery.de/products/esp32-developmentboard?_pos=2
- Optional a common OLED module
- A decent case

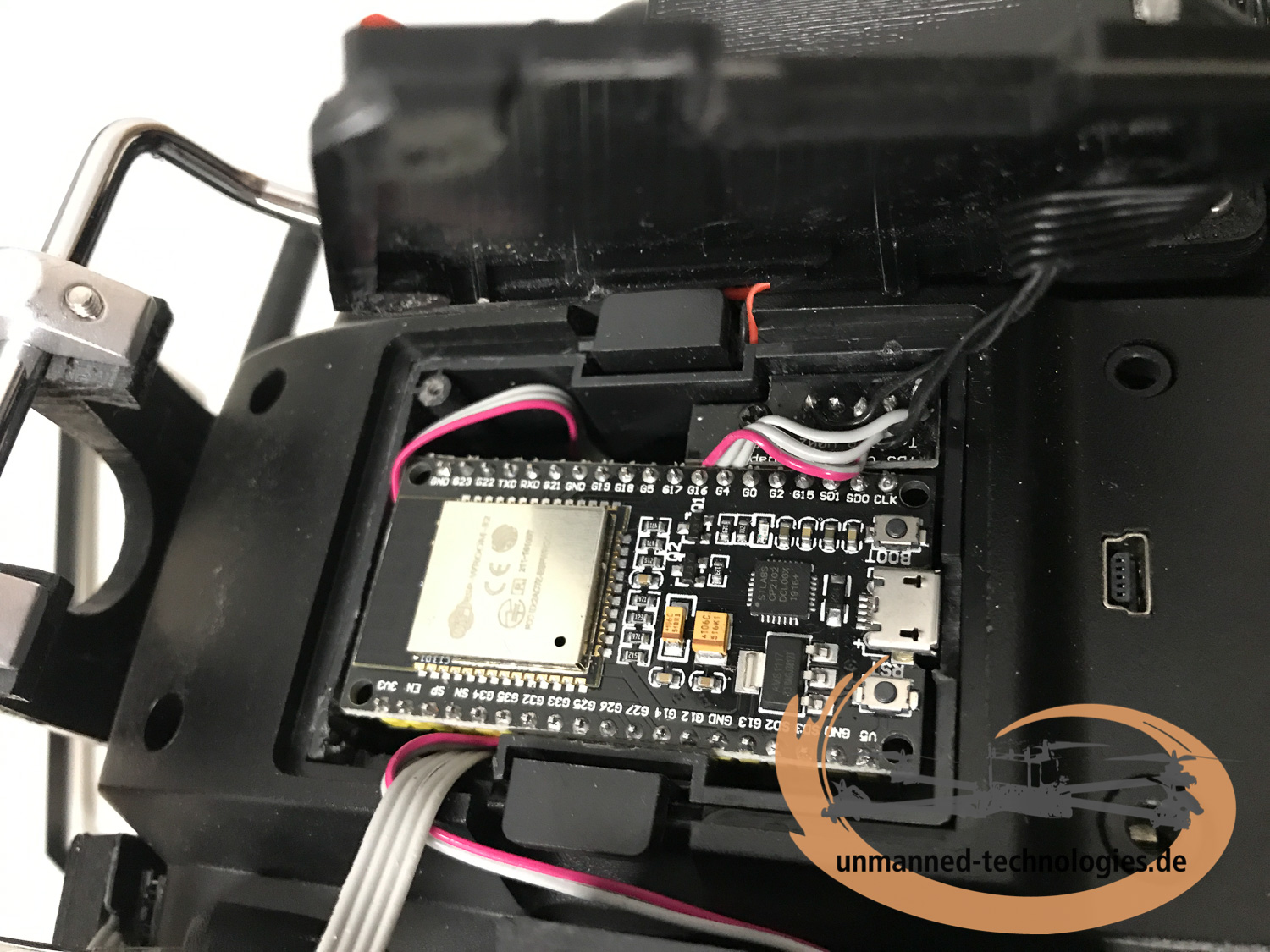
Some simple modifications for the connection Taranis <-> Corssfire <-> ESP32 are necessary.
- Pin 1 of the Taranis expansion slot connector receives the PPM from the Crossfire TX. So you have to reconfigure the settings for the external HF module to PPM (12 Channels).
- Pin 3 is Vcc to Crossfire and to ESP32. The ESP32 Dev module I’m using has it’s own voltage regulator, so it is no problem to feed the 8v from Taranis directly to the v5 pin of the module.
- Pin 4 ist GND.
- Pin 5 must be disconnected from the Crossfire TX. This is the the SPort input from the ESP32. As the ESP32 with mav2pt can invert and single wire on its own, there is no need for an external onewire or inversion logic.
Software configuration in config.h (I’m using the recent version 2.56.4):
Telemetry in/out to the FC via Crossfire Bluetooth:
#define Ground_Mode
#define FC_Mavlink_IO 1
#define GCS_Mavlink_IO 2
#define BT_Mode 1
#define BT_ConnectToName "Crossfire "
//#define RSSI_Override (comment out)
Telemetry relay to WIFI (either as own acces point, of connecting to a existing network):
#define HostName
#define APssid
#define APpw
#define APchannel
#define STAssid
#define STApw
#define Start_WiFi
#define WiFi_Mode 3
#define WiFi_Protocol 2
ESP module specific settings:
#define ESP8266_Invert_SPort_To_Onewire
#define ESP32_Variant 1
#define MavStatusLed 01 (in my case)
Caveats (at the moment):
From time to time the Taranis or the yapuu script announces a “telemetry lost”, immediately followed with a “telemetry recovered”. It seems that from time to time the RSSI packets are coming a litte tick to late. But tha must be investgated deeper
Maybe this litte text is helpfull for some of you.
Thank you, Eric, yaapu and all others for your wonderful work.
bg, Stefan