
Indoor Drone operation requires methods for detecting obstacles and avoiding them effectively. Ardupilot offer a great selection of peripherals to accomplish this task
https://ardupilot.org/copter/docs/common-rangefinder-landingpage.html
and I enjoyed experimenting with different type of configuration like the POC, using STM ToF sensors or BENEWAKE TFMini Lidars
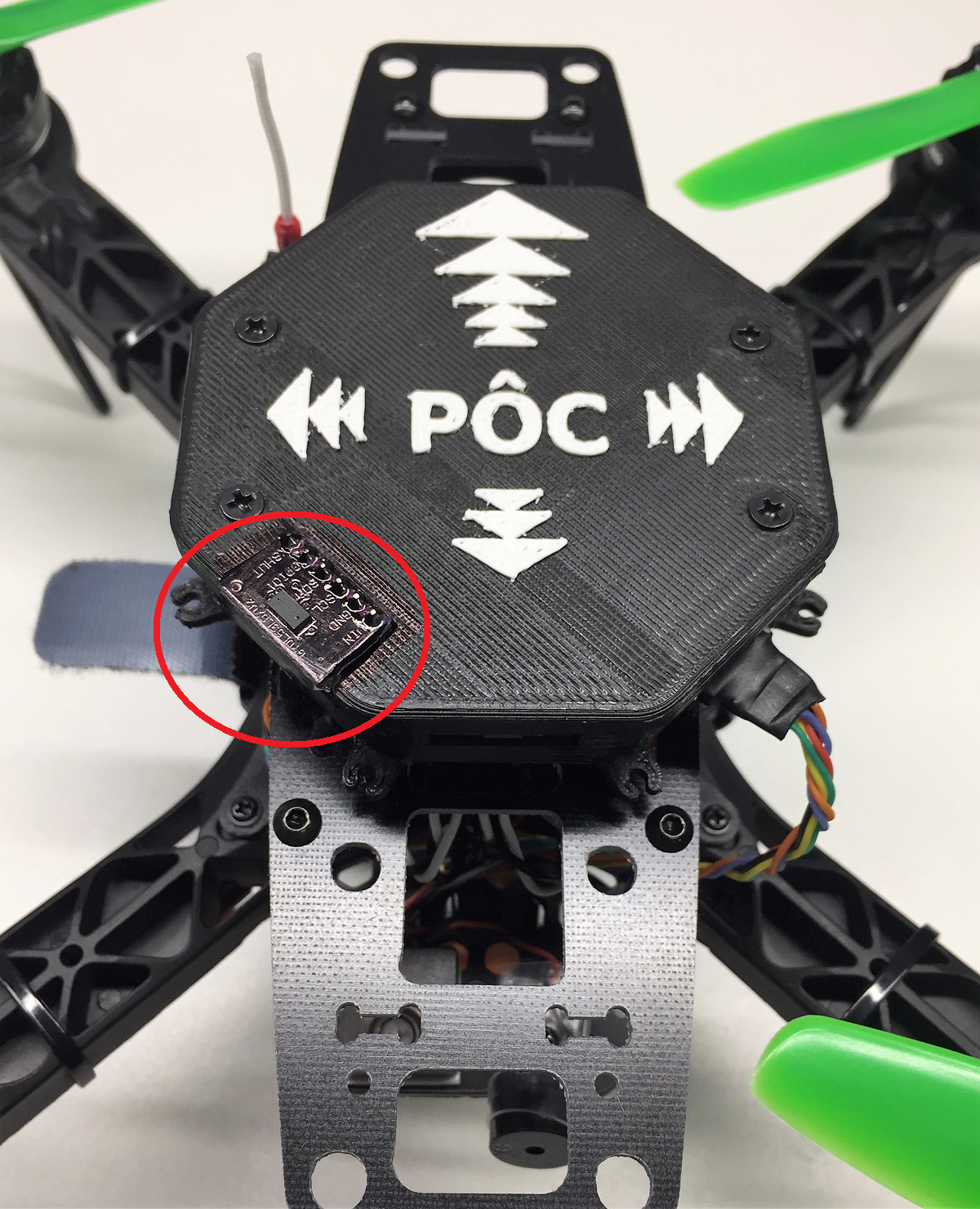

Lidar’s technology has evolved at a fast pace in recent years and the unidirectional sensors using Time Of Flight technology can accurately read longer distances with less interference of the ambient light. The limitation of this technology is the small coverage of obstacles detection as they read the average distance of a very narrow FoV (Field of View), hence the requirement for building arrays , like the POC but the detection remains spotty.
Until now , to effectively read distance on a full 360 coverage, we had to rely on mechanical rotating lidars that are quite accurate and relatively fast but not well adapted to flying vehicles as they are heavy and fragile. I worked with different models on my builds and in order to get good coverage, you generally need to install the device on top of vehicle, making it exposed to direct hit in case of crash (and that happens a lot when performing indoor experiment)
Recently, CYGBOT released a Solid State 2D Lidar that offers interesting features
https://www.cygbot.com/2d-3d-dual-solid-state-tof-lidar

Specification
Detection Range 2D : < 200mm ~ 8,000mm 3D : 50mm ~ 2,000mm (DRM)
Distance Accuracy ±1%
Field of View 2D/3D Horizontal : 120º 3D Vertical : 65º
Resolution 2D : 0.75º (Angle) 3D : 160 x 60 (Pixel)
Measur. Speed 2D : 15Hz 3D : 15Hz
Wavelength LED : NIR 808nm Laser Diode : NIR 808nm
Operating Temp. -20º ~ 60º
Interface UART TTL(3.3V) 57600 - 3,000,000 bps
Size (WHD) 37.437.4*24.5 (mm)
Weight 28g
With the help of Rishabh Singh, a CygBot Lidar Proximity Driver was quickly developed Complete Parameter List — Copter documentation
and the accuracy and fast sensor distance direction on a large FoV of 120 degrees was tested successfully.
Multiple Backed Proximity Sensor
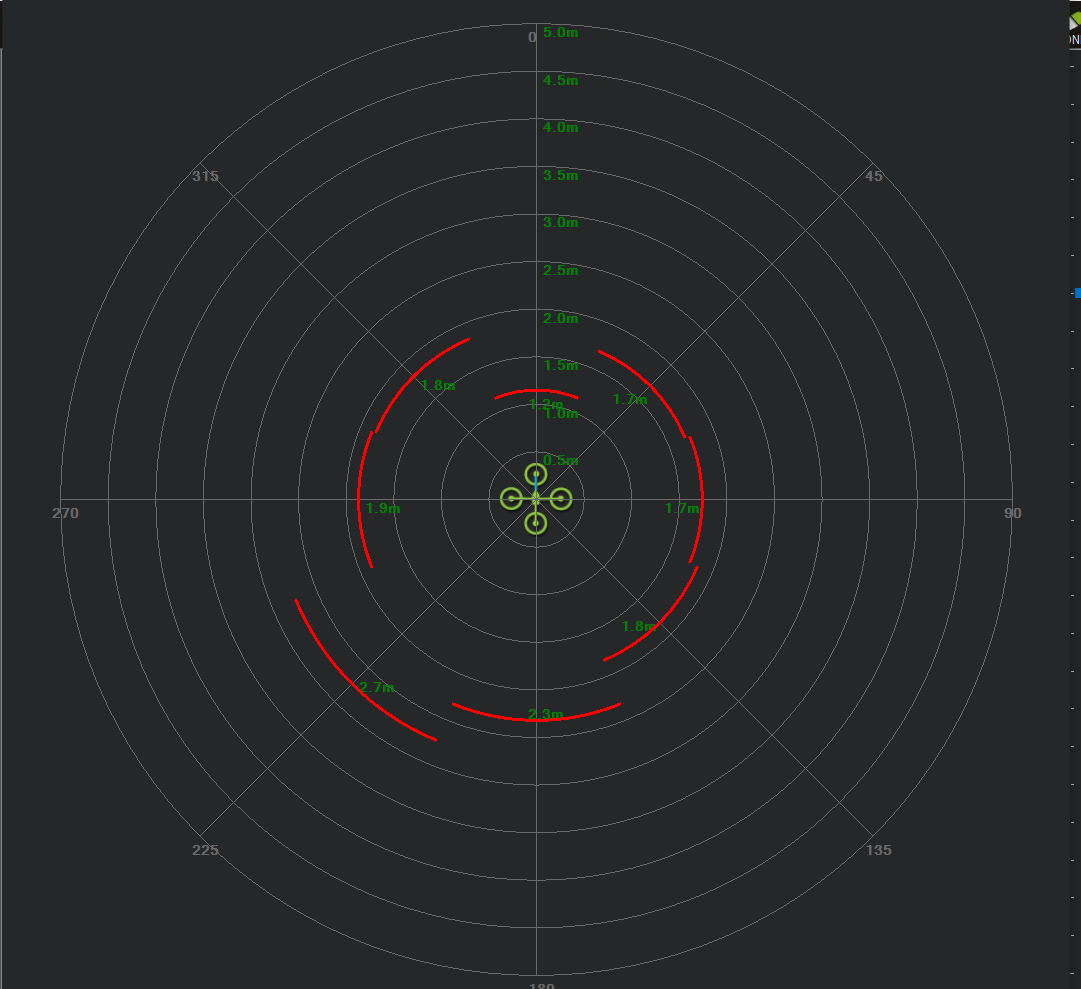
In order to benefit from this new type of Proximity sensor, a new feature for the driver was required and once again Rishabh was pivotal in the development of a Multiple Backend for the Proximity Driver. This development consists of running concurrently multiple instances of a driver in order to “stitch” together the reading of the 3 x 120 degree sensors and then getting a full 360 deg. of coverage.
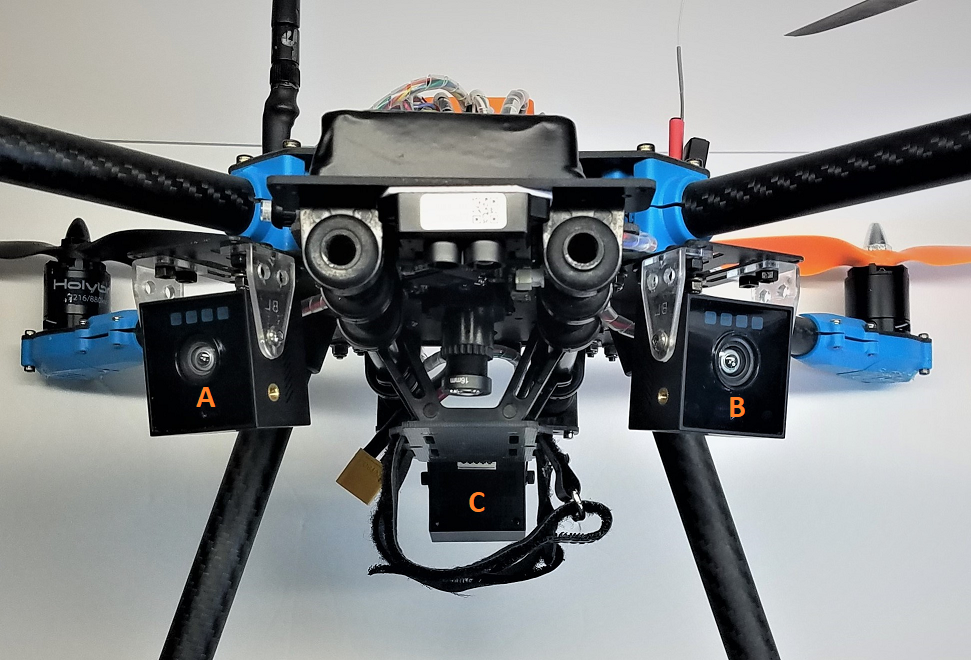
These are the picture of the integration of the sensors on my HolyBro X500 V2 development Quadcopter with the CygBot installed at +45 , -45 and -180 degrees relative to Fwd of vehicle giving some overlap (15 degs) on the front detection and 2 blind spots on the side (105 to 120 deg on each sides).
Bottom and Front view of Installation

Radar View of Proximity Sensors
Parameters for this configuration:
UART 1 , 3 and 4 are respectively connected to sensors C,B, A as the backend populate in reverse UART order
SERIAL1_BAUD,115
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,11
SERIAL3_BAUD,115
SERIAL3_OPTIONS,0
SERIAL3_PROTOCOL,11
SERIAL4_BAUD,115
SERIAL4_OPTIONS,0
SERIAL4_PROTOCOL,11
AVOID_ACCEL_MAX,
AVOID_ALT_MIN,0.5
AVOID_ANGLE_MAX,1000
AVOID_BACKUP_DZ,0.1
AVOID_BACKUP_SPD,0.75
AVOID_BEHAVE,1
AVOID_DIST_MAX,1
AVOID_ENABLE,2
AVOID_MARGIN,1
PRX_ALT_MIN,1 **
PRX_FILT,0.25
PRX1_MAX,0
PRX1_MIN,0
PRX1_ORIENT,0
PRX1_TYPE,13
PRX1_YAW_CORR,180
PRX2_TYPE,13
PRX2_YAW_CORR,45
PRX3_TYPE,13
PRX3_YAW_CORR,-45
** Cygbots sensors are tilted down to avoid propellers interference, so in order to reduce ground detection, we set Proximity minimum altitude to 1 Meter
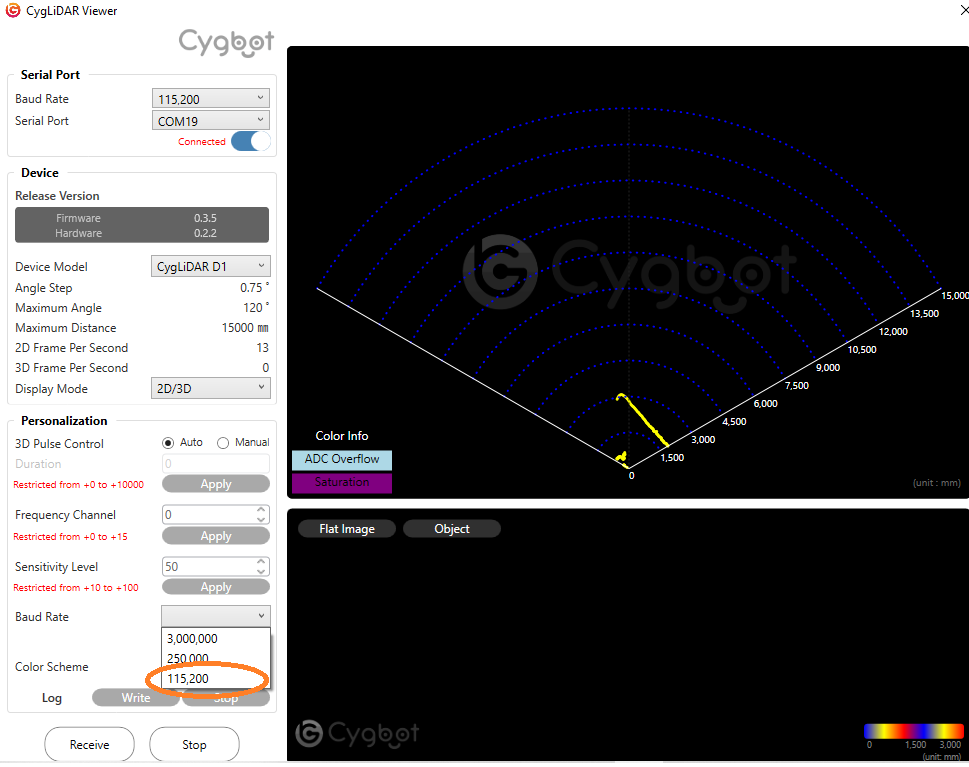
Setting the CYGBOT Baud Rate
In order to get the Cygbot working with the Flight Controller, we have to change speed to 115200 bps. We can make this change using the Cygbot Lidar Viewer and and connect to the device using the supplied USB to Serial adapter. You connect using the default speed (3,000,000) and then select Baud Rate 115200 and APPLY change and after power cycle the Cygbot you should be able to connect at 115200.
Demo Flight
A word of caution here: Doing automated flight indoor in confined space is not safe. This drone has been modified with soft blades and i wear safety glasses and the foam I am using for Avoidance is my protection as well. Be carefull , and please wear glasses
Converting the Serial Proximity to CAN
Having to work with multiple serial devices requires a lot of Uarts and we do not have too many on the Flight Controllers. One way to address this problem is to convert a serial proximity sensor into a DroneCAN device. In order to proceed, we need to develop a DroneCAN driver for the Proximity devices that can be loaded into a small and affordable DroneCAN Adaptor Node, like the Matek L431 Board.
https://ardupilot.org/copter/docs/common-uavcan-adapter-node.html#l431-based
Guess who made the development for this driver ? Yes , the talented Rishabh ![]() , actually, the development is still in progress and it is passing the different phases of Push Request and Peer Review in the development process on github. We will update when the code will be available in Main Branch, ready to test.
, actually, the development is still in progress and it is passing the different phases of Push Request and Peer Review in the development process on github. We will update when the code will be available in Main Branch, ready to test.
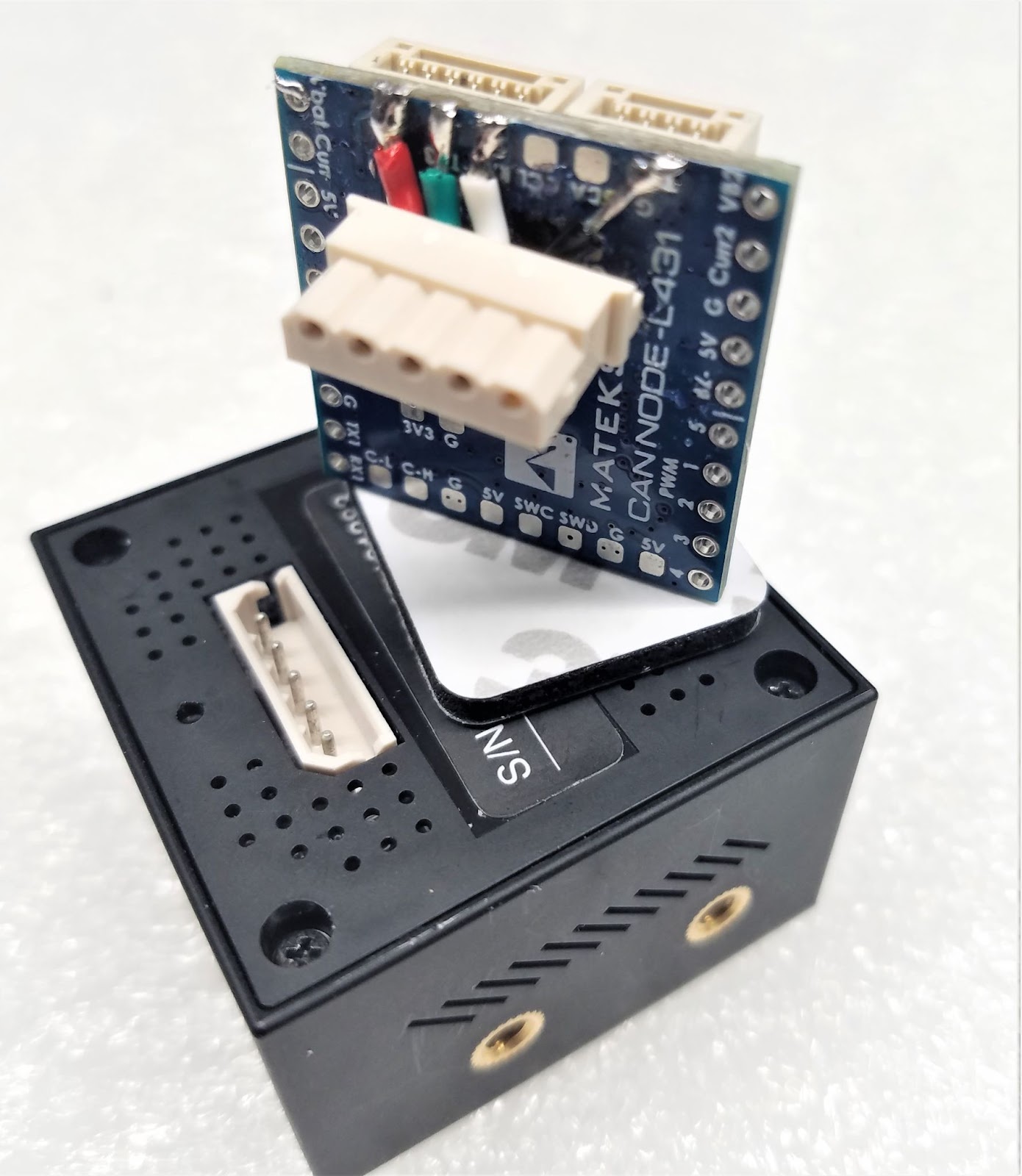
Left Picture of MatekSysCAN NODE L431 and Right is is how I proceed for integration with Cygbot using the supplied connector and soldering it directly to TX3/RX3 pads of the L431
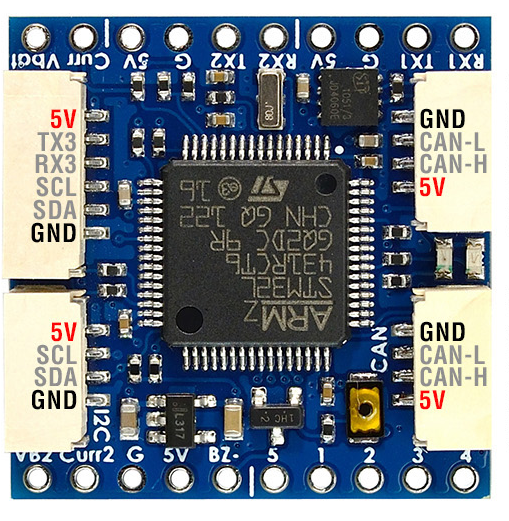
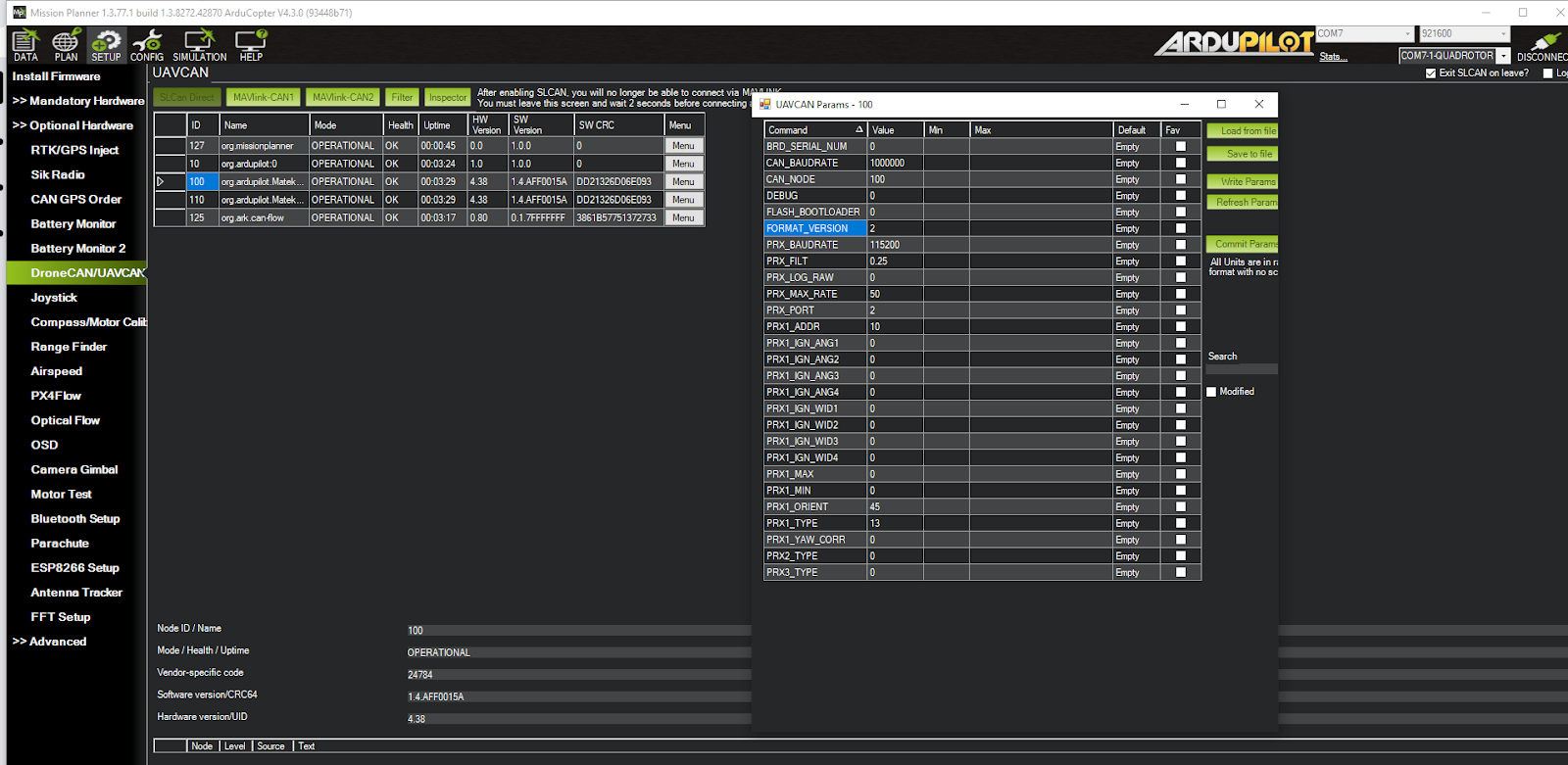
Below is how we configure using Mission Planner connected to an Orange Cube SLCAN port. We assigned NODE to 100 , Proximity ADD to 10 and Orientation to 45 and Type to 13
Take note that we assigned PRXPORT to 2 as the port numbering starts from zero “0”
On the Flight Controller we assign the proximity type 14 = DroneCAN Proximity Sensor
PRX1_TYPE,14
PRX2_TYPE,14
PRX3_TYPE,14
That’s it for the moment, just hope that this Blog can help anyone interested on experimenting with these new devices and the associated techniques of implementation.