Hi, I have a problem with SF40/C 360 Lidar on DroneCAN showing measurments only in front of a drone, not full 360° coverage.
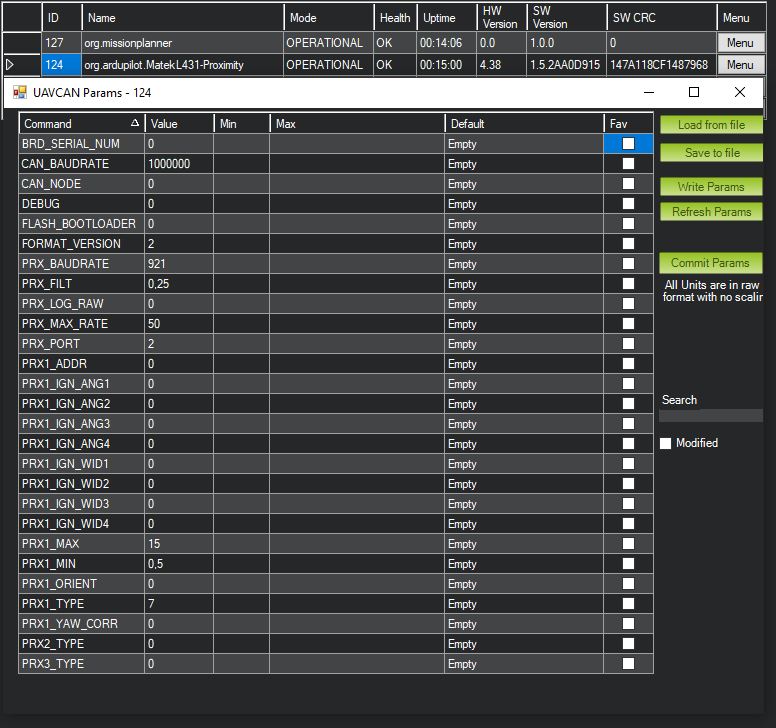
The LIDAR is connected to MatekL431 CANnode with both AP_Periph/MatekL431-Proximity firmware flashed. (Steps based on this article: 360 Avoidance using multiple CygBot Lidars - #3 by AnJu ).
FW is Arducopter 4.4.0-beta2 on Cube Orange+
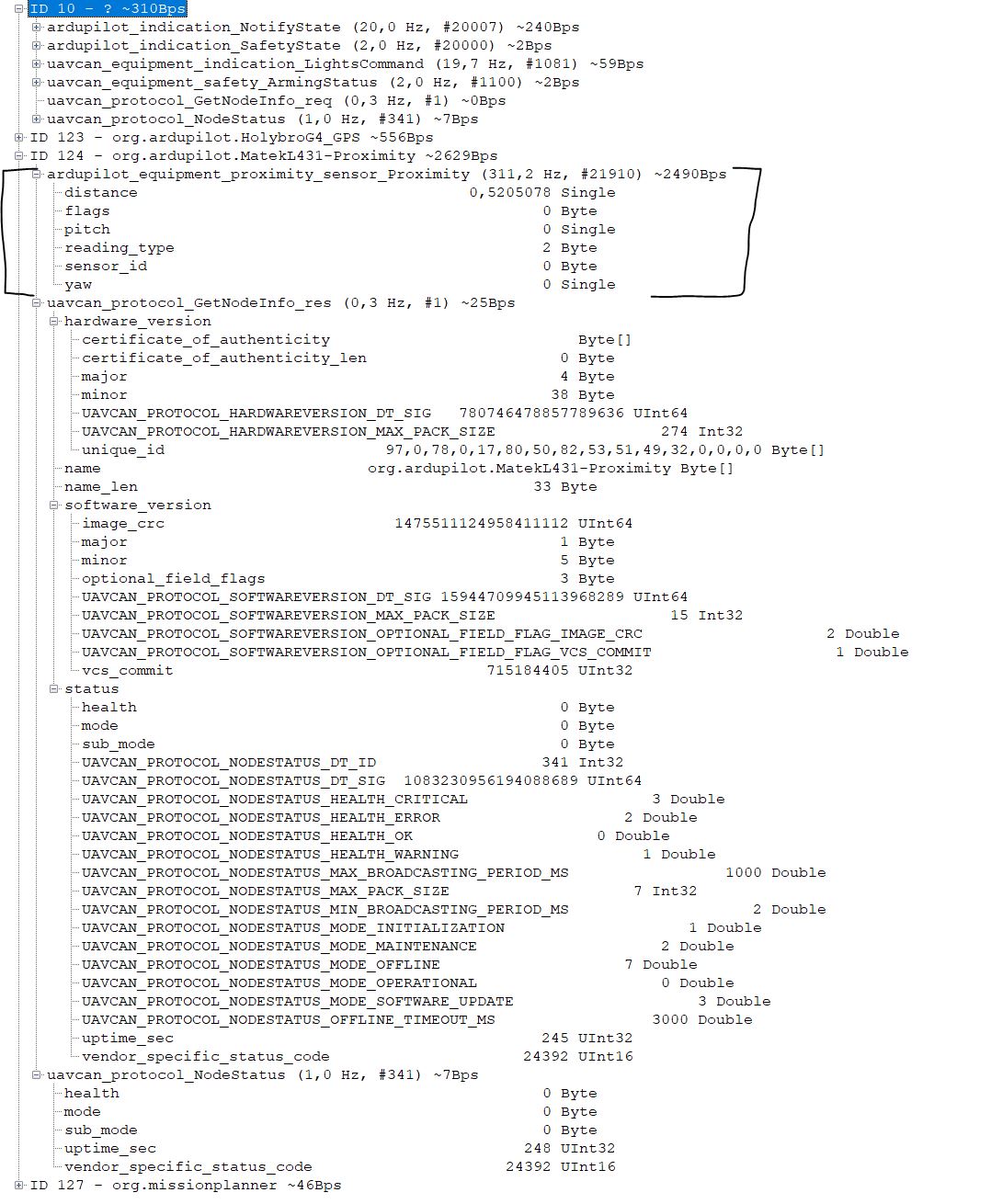
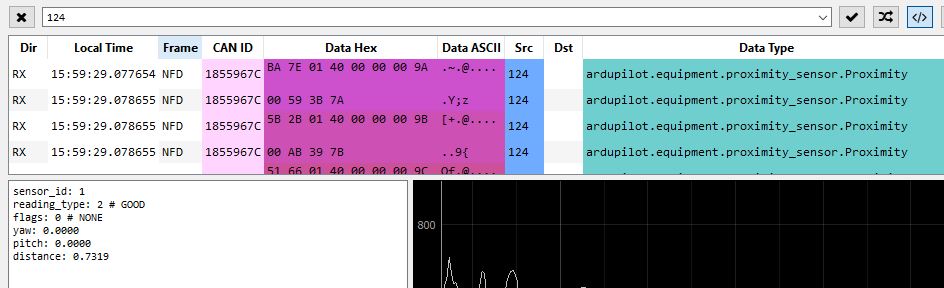
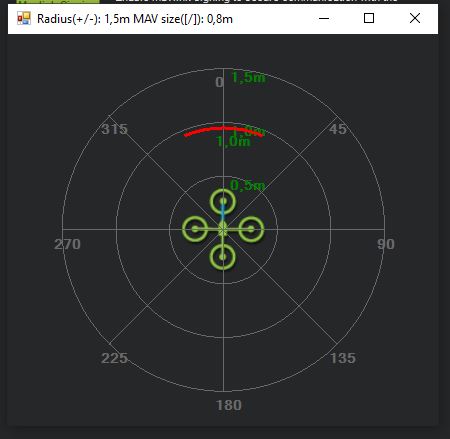
It somewhat works, but the messages on the canbus transmit obstacle distance only in first sector . Also, obstacles are displayed only in front of drone in mission planner proximity GUI.
The classic serial connection works perfectly fine, obstacles in GUI are displayed in full 360° coverage.
Any ideas? Thanks for help