Hello, I built a 3" drone, X frame with Matek f405ctr, 4 in 1 ESC, 4000KV motors. This drone flew under INAV and now I installed Ardupilot V 4.0.5. No GPS yet, built in barometer and external mag QMC5883L. Flysky FS-I6X transmitter and mini Flysky receiver. IBUS.
As I mounted the compass several cm away from the other electronics, there is little distortion.
I double checked motors order, propeller orientation, did all calibrations … but when I arm the copter the motors turn irregularly. Impossible to take off.
In motor test mode, the motors spin smoothly. When I arm, the motors idle smoothly too. As soon as I increase throttle, the oscillations occur.
I read all related posts but I did not fint the solution for this problem.
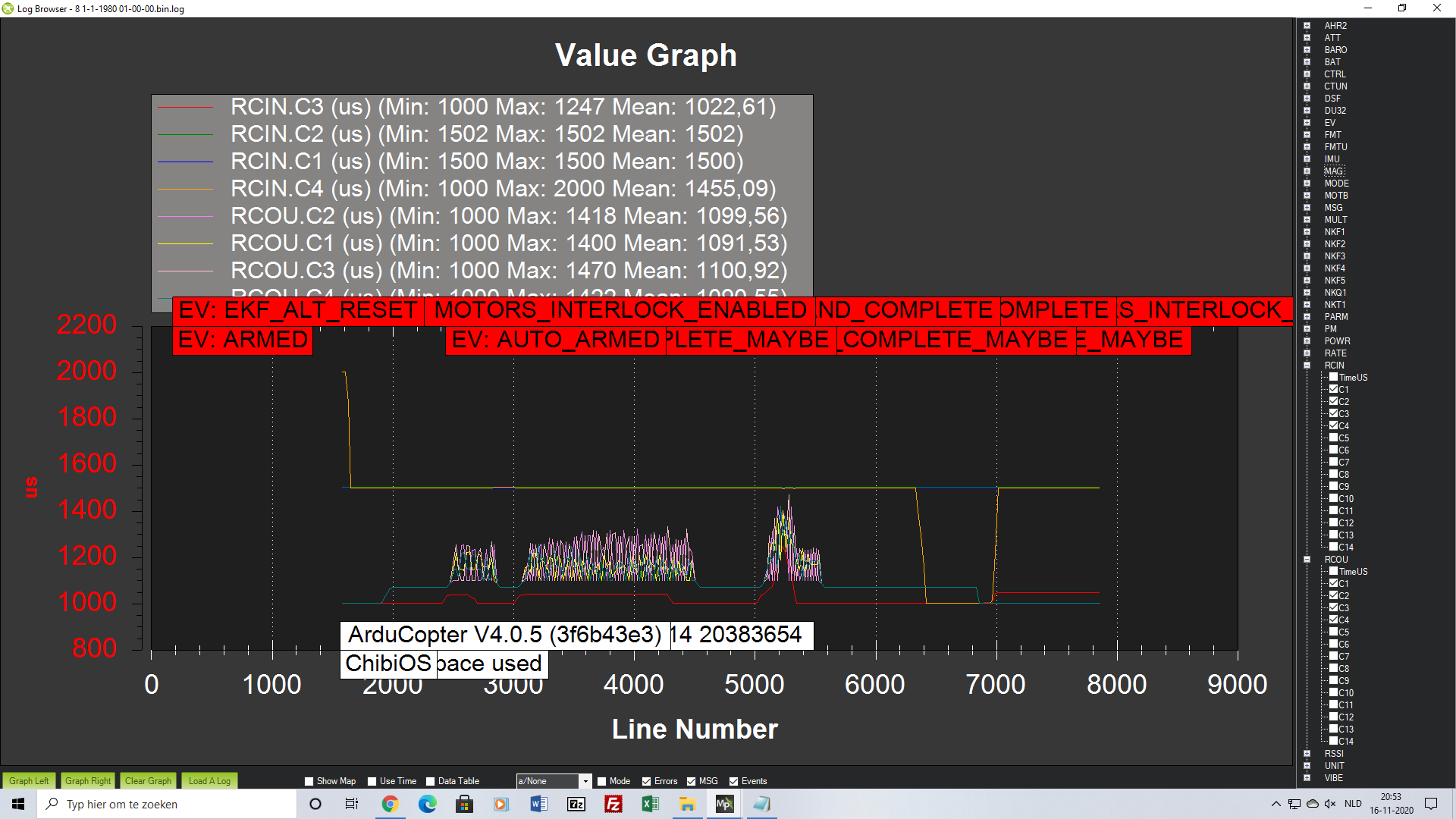
I add a screenshot showing RCIN and RCOU for channels 1-4. I also add a log file. During this “flight” I held the drone in my hand, it has not yet flown under Ardupilot.
Does someonne have a clue what is wrong here?
You missed the most important pre-flight tuning steps. That small quad will not fly on default parameters. Connect in Mission planner Press Alt>A and input the info as prompted. More info:
https://ardupilot.org/copter/docs/arming_the_motors.html
Thanks a lot Dave, I have missed the Alt>A procedure.
The behaviour of my quad is already much better. Still needs more tuning. But now it’s dark here, I’ll do a test flight as soon as possible.
All the best!
You will also want to use the Dynamic Notch Filter. Follow the instructions or at least until you have a flight log from the 1st step which you can post here. After this is set you can try Autotune.
https://ardupilot.org/copter/docs/common-imu-notch-filtering.html
Feel free to check out my thread, I have been at an almost identical setup for a while:
Lots of helpful answers there already. ![]()
I had such a buildup, I reduced the d value to 0.01 and it flew well
Thanks, this helped me a lot already. I briefly tested it and I have liftoff now. Also discovered that I needed to reverse pitch on my transmitter. I mowed some grass while discovering this.Now I feel that I’ll get there.
Thanks Dave, I’ll do that. The weather is not ideal here now (windy, bit of rain sometimes). I clearly had to adjust the parameters more.
Do you have ESC telemetry available? On Arducopter current Stable this is the best reference for the notch filter. If you don’t throttle reference must be used. Unless you run AC4.1-dev then you may be able to use FFT tracking. I say 'may" because I’m not sure if FFT is feature limited out of the F405 or not.
Hint-Next build use an H743 based FC 
Hi Dave, the ESC I use is a 4 in 1 HAKRC 15A Blheli_S BB2. I don’t know about the telemetry. Just building a small quad for fun. In the EU we will soon have new UAV rules. A drone of maximum 250 grams (all in) is considered a toy and it doesn’t need to be registered and I don’t need a piloting license for it. That is why I want to keep it simple and light.
I still want to add an optical flow sensor Cheerson CX-OF (ordered) for the Flowhold mode.
In INAV I used the Matek optical flow sensor + LIDAR. I found this a bit useless given the short effective range of the LIDAR. Arducopter seems to offer more sophisticated features but it is tougher to set up.
I did a very short indoor test flight. There is not enough space to do the autotuning. I add the log file for info. Maybe this contains hints about the notch filter.
32 1-1-1980 01-00-00.bin (754 KB)
Hi Walter-No ESC telemetry with BLHeli_S only BLHeli_32. But that’s OK, there are other options. For the log to be useful for notch filter parameters you have to set the INS_LOG_BAT_MASK to 1. Then make another short hover flight ~30 seconds if you can, and post that log. Chances are it will be too large to attache here, you will need a cloud service and post the link. Then we can review.
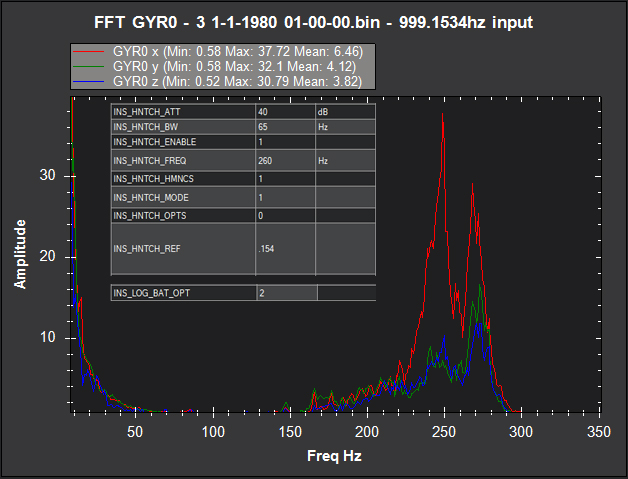
OK Dave, the weather is better today, so I changed the parameter and did a few short hovers. Here is the log file. I hope it is useful. Best regards.3 1-1-1980 01-00-00.bin (828.5 KB)
OK, cool. So you can try the Dynamic Notch parameter settings shown embedded here in your FFT graph and make another hover flight and post that log. The change in log parameter will now log post filter data which will show how effective the filter is and confirm the settings are good or need more work.
In my thread dealing with an almost identical quad Andy told me yesterday to set FREQ to 80 and BW to 40, without even looking at the FFT graph before, since the frequency will be scaled by the code. The docs are apparently a little outdated when it comes to ESC telemetry.
In any case, the notch filter tuning had no effect on oscillations/vibrations for me so far.
Different animal. Current Stable AC, which Walter is running, doesn’t have FFT tracking. I mention this in a post above. If he wants to use -dev version then I would have suggested FFT reference. I run -dev on several craft but personal choice as I’m OK with these as Test Mules.
Ah I see, I had overlooked that. I found out that new features tend to arrive in the dev version just in time when I need them, so I’ll be sticking with it too.
Hello Dave,
I entered the values that you suggested. For INS_HNTCH_ATT , the maximum allowed value on my quad is 30, so I entered 30.
The drone flies quite well. Just, in altitude hold mode, the altitude is sometimes a bit erratic. It happens that the thrust decreases a lot. When I rise the throttle, it ascends a bit fast. But once stabilised it holds well.
I add another log file. 12 1-1-1980 01-00-00.bin (828 KB)
Wow, your vibrations are really low compared to mine. What frame are you using, and could you post a pic of the quad?
Sure. I designed and 3d printed this frame. I used PLA. I also printed another one in ABS (under construction) which is lighter and stronger. I’ll mount a GPS on that one.
The tower contains the magnetometer and, in an alternative version, it will hold the GPS/magnetometer. The antennas look strange because I lost the original ones in crashes and trees, so I made my own.
With a 3S 1000 mAh battery it weighs just a bit over 240 grams.
As for vibrations: Certainly it has to do with Dave’s calibration magic. I think that the propellers also matter a lot. These are from Lumenier. Their finish seems finer than cheaper ones.

Thanks. Your motors are probably also a better choice. Mine are 1106 4500kV and have to work really hard to lift the quad. It was originally planned as 2S but I quickly realized that way I would never be able to put all the stuff on it that I wanted. (I originally planned this 2 years ago when I knew much less about quad building.) The 4500kV are the only ones of this series of motors that also support 3S - but just barely I guess…