Today I was testing my first little 3" AC build but unfortunately it wouldn’t take off. Video here: https://wsi.li/dl/cPdre9wW2sWSrApRL/
The quad is shaking massively even on the ground and increasing throttle only makes it vibrate more, but not take off.
I checked motor directions and order, all seem fine. I held the quad in my hand, air blows down. I followed the Tuning Process Instructions, used the calculator, and believe I have set approximate values for 3" and 3S. But since it’s my first build (actually a conversion), it’s absolutely possible I overlooked something basic.
As I really prefer not to post GPS data online, I tried anonymizing the log with Dronee Plotter. Yet unfortunately it didn’t output a link as promised. (It would be fantastic btw, if there was a built in way in MP to remove GPS data from logs.)
If no reason can be found without the log, I’ll post it anyway. 
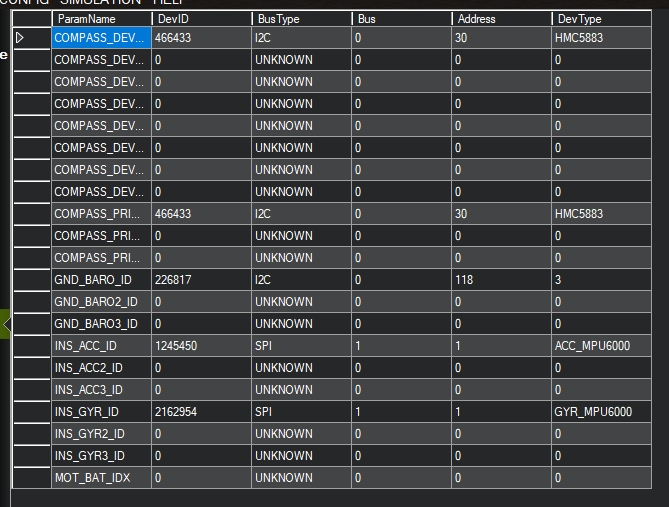
One thing to note: ESC telemetry is enabled (in order to do gyro notch tuning later), but the RPM indicated on the OSD looked far too high. (Maybe by a multiple of 10.)