Yes, I’m using 4.1 and INS_HNTCH_MODE = 3 with ESC telemetry. I set INS_HNTCH_FREQ to 300. INS_HNTCH_BW however could not be set to half of that, as indicated here, as 150 would be out of range. I was hesitant to set it to absolute max (which was actually 80 in MP, not 100 as indicated here, so I set it to 40 for now. Maybe it should be more?
1000 to 2 on the left and 130 to 5 on the right at 300Hz looks like a big reduction to me, but I’m not really good with numbers, so I’m sure I mixed something up.
This was just a first indoor test to see if things go into the right direction.
Generally, can the negative altitude be related to this or is it a separate issue?
Yes your BW is the problem. For ESC telemetry (and FFT) it is the ratio of freq to BW that is most important. This defines the Q and is kept constant. So it would be fine to set these to 80/40 say and still get the right values at higher frequencies
The docs for BW are wrong - I’ll get them changed. You can set the out of range value quite happily.
Yes, exactly. The code will scale this to the appropriate frequency keeping the shape the same. This is how it works for multiple harmonics if you set 80/40 and want to cover two harmonics then the next harmonic will be 160/80, not 160/40.
Also make sure you are using INS_HNTCH_OPTS=2 to cover motors individually
Ok I see, multiple harmonics, I know that from audio - that’s indeed totally different from what the docs said, and INS_HNTCH_OPTS wasn’t even mentioned.
It looks like the notch filter tuning process is not needed much, otherwise someone else might have already noticed the outdated docs. Probably on bigger quads it’s not needed, at least it wasn’t on mine.
Pretty much. The only thing that might mean you want to check the FFT is if you are not sure whether you have got the number of motor poles right or not. For smaller motors this is often 12 rather than 14 - and getting it right makes a big difference.
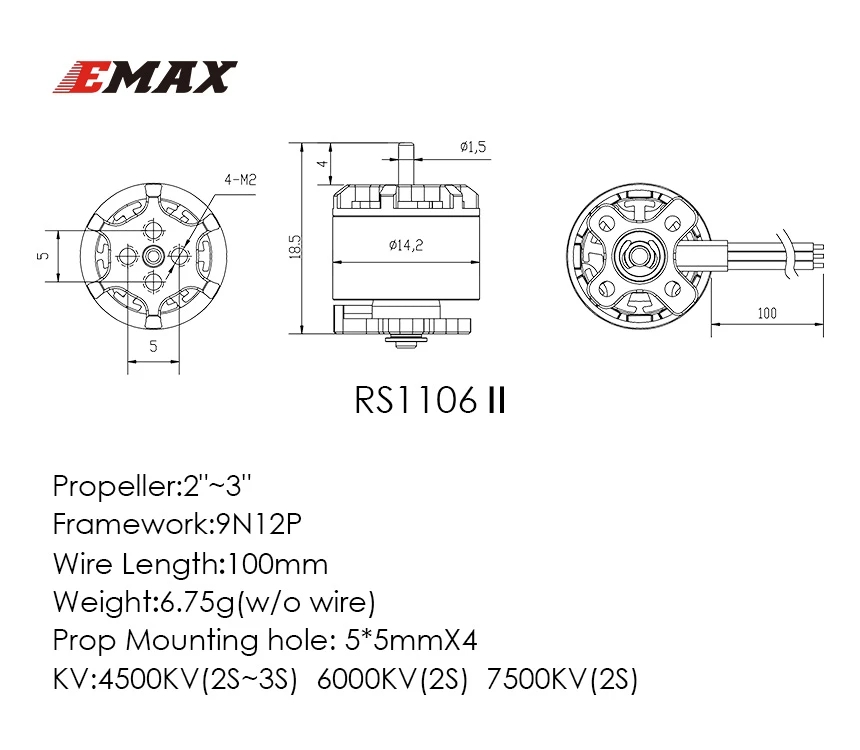
One thing keeps leading to another… Never cared about motor poles so far. So these motors are 4500KV, and I’m getting RPM readings at hover with 3S of about 14000 to 16000 - does that sound right? And can the number of poles be guessed from this schematic?
If you have INS_HNTCH_OPTS=2 then harmonics is ignored. This puts a notch on each motor rather than a series of harmonics from a single frequency. Note that it only works for quads - not recommended for 6 or 8 motors.
It’s probably not as bad as that. What should happen is you get notches on the first four motors, but on bigger quads that may not be what you want - generally small quads with their stiff light frames get a single massive peak, on the bigger quads with all of their noisy, bouncy things going on a single notch centered on the motor average with harmonics may kill more of the noise.
Ok, I’m reviving this thread as history is repeating itself (partly at least). I eventually got the original 3" project flying ok - but there was always just too much interference, GPS glitches etc., due to the small size and the components being too close together. It was also easy prey for the wind and had very short flight times.
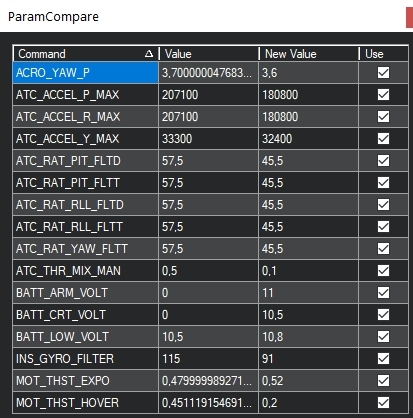
So I swapped the 130mm frame for a 180mm one and the 1106 motors with 3"/2.5" (tried both) props for 1805 motors with 4" props. I then ran the initial settings calculator for a 3S 4inch quad which resulted in the following changes:
And once again, it won’t really take off. No visible oscillations at all this time (FC is mounted ultra-soft now) but simply not enough thrust. Here’s the log:
I checked radio calibration, PWM output, ESC PWM range… everything seems ok to me. But still there must be some silly mistake somewhere.
The battery is a 3S 1800 mAh with a rather low C rate but that shouldn’t keep the quad from at least climbing I guess. I also tried another battery and the result was even worse.
What is the take-off weight? RCouts commanded to max, battery sags a ~1V and stuck on the ground. Also, do you have the barometer covered with some foam? On your take-off attempts the baro shows a drop of ~4m. That will be trouble.
As for the foam, I transplanted the complete soft-mounted FC “tower” to the new frame. On F405-CTR, the barometer is on the bottom of the FC, and I’m pretty sure I put some foam there when I originally mounted it a few months ago.
It’s a bit difficult to check at the moment, but on the old frame I was even able to use Altitude and Position Hold with no problems (as long as no interference/glitch occured), so the baro must have been working ok then.
The AUW is 390 grams with 3S 1800mAh lipo. Even on the smaller frame with the tiny 1106 motors I was able to fly with a 3S 1300mAh battery.
I did see that baro curve but first the quad has to be able to take off. Could the dropping curve also result from the airflow of the props on the ground?
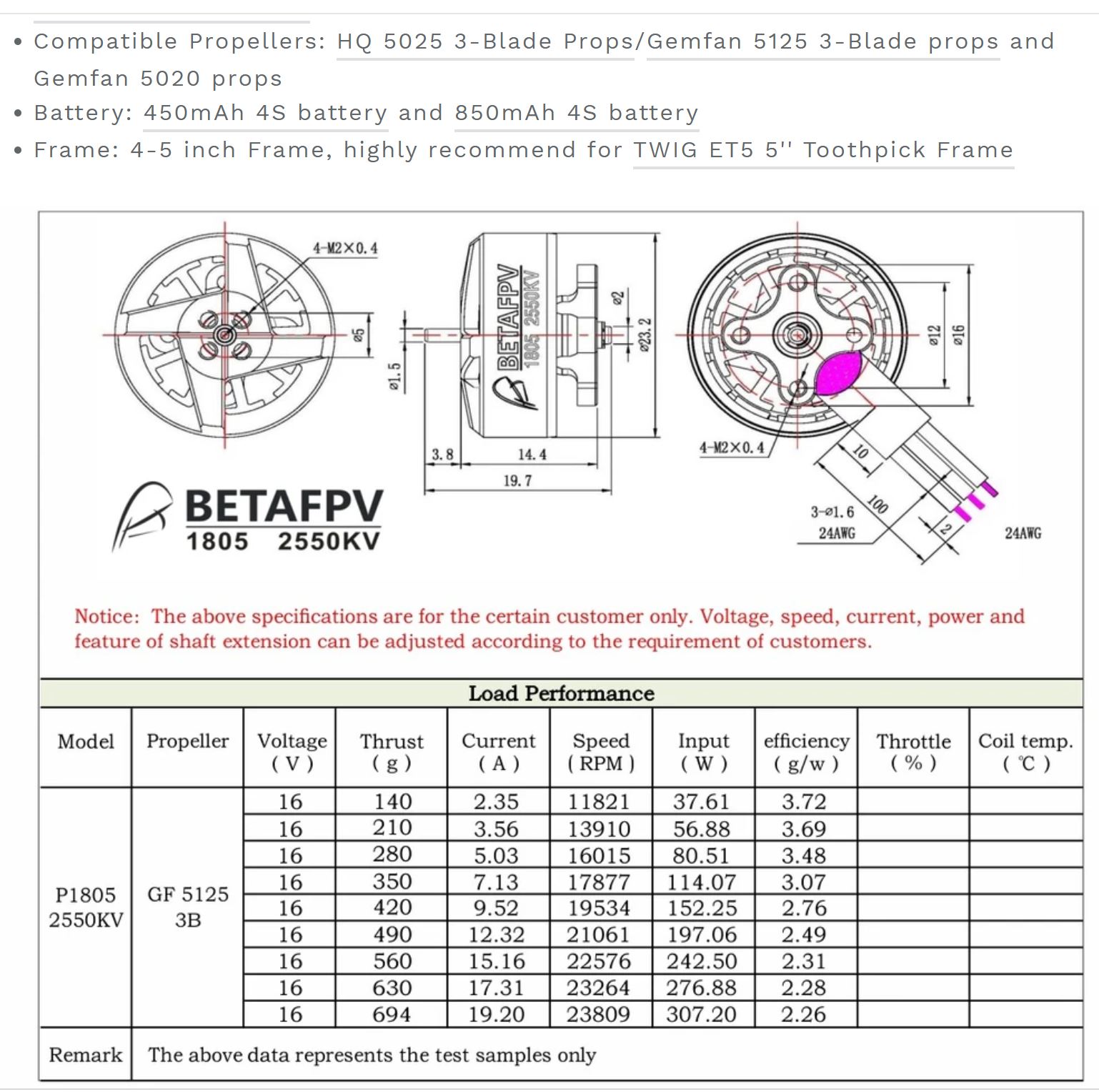
The motors are 2550 kV (https://betafpv.com/products/1805-brushless-motors) and supposedly “great for 4S power”, but even then the lift should suffice to take off on 3S? These are meant for racing so there must be lots of spare power?
Of course I could try 4S but it seems like a brute force solution to a problem that I still believe must lie somewhere else, so I’d rather like to solve that instead of just increasing the voltage.
I don’t think it lies elsewhere. BetaFPV’s own website suggests 4S with 5" tri-blade props. You have 3S with 4" props. Of course weight is a consideration but even eCalc shows insufficient thrust.