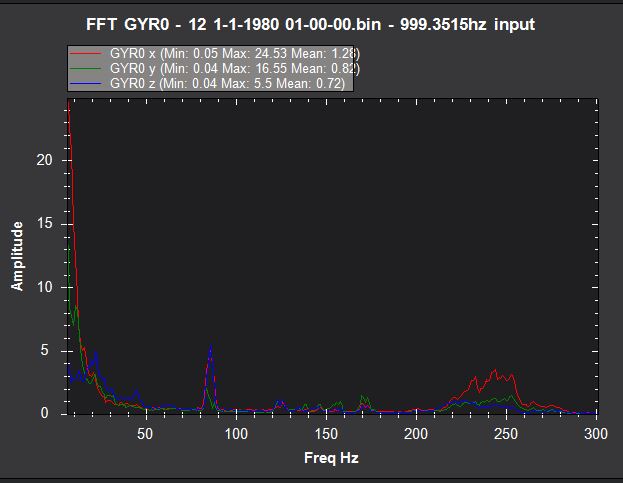
The notch filter is working great, you are done with that. Now on to tuning as that needs help which is to be expected. Hopefully Autotune will get it close. Regarding altitude instability, do you have the barometer covered with foam? Pretty much required.
Note: increase the INS_HNTCH_ATT to 40 and ignore the out of range nanny warning.
This is great, Dave!
I overrode the warning for the INS_HNTCH_ATT value.
Is this filter analyzer part of Mission Planner?
As soon as we have a day with light winds I’ll take the drone to a spot where I have plenty of room to activate Autotune.
And yes, the barometer is behind a slice of sponge.
Many thanks for your help in making my quad fly nicely!!!
I think that your motors should be able to do the job with a 3S battery. I have no idea what the weight of your quad is, but your motors save over 20 grams compared to mine.
Hopefully you get your drone to fly well. All the best!
Hi Walter- Yes, the FFT graphing is part of Mission Planner. From the Setup>Optional Hardware>FFT Setup menu there is a button “FFT”. Press this and the graphing window will open. Then select the “New DF log” button and enter the log file you want to analyze in the file open pop up. There are some Windowing and Cursor tools you can use in the graph panes to zoom in and spot frequency events.
And BTW-I built a 3" quad shortly after Arducopter was first ported to the Omnibus F4 Nano and worked thru many early issues getting it to fly. Lot’s of crashing along the way. This was before there was batch logging available on these SD cardless wonders. Much, much better tools today
Thanks for the graphing info.
About the Althold problem: I think that is only occurs a few seconds after liftoff. Once corrected, it holds altitude nicely. At first the quad drops, I increase throttle to counter-act and then it holds altitude, it doesn’t shoot up then. Therefore I think that it starts in Stabilize and that Althold is activated only a bit later. I switch it to Althold before arming.
Post a flight log of this. I’m not really following this " it starts in Stabilize and that Althold is activated only a bit later". There is some tuning you can do with the Altitude Hold Controller.
Ah OK, this sounds normal. It won’t really lift off in an AltHold mode until ~ mid throttle. But where mid throttle is depends on whether it’s been “learned” or not. I always lift off in Stabilize and then switch to another mode once it’s off the ground.
This is probably a stupid remark, but… you already know that throttle has to be above 50% for the quad to rise in ALTHOLD, and at 50% to hold altitude, right? I never take off in ALTHOLD but probably for very first ascend throttle is somehow interpreted differently, otherwise it wouldn’t start to rise before mid-throttle. Or at least that’s what I assume as a still-newbie.
EDIT: Confirmed by a pro - remark wasn’t stupid after all.

 I never take off in ALTHOLD but probably for very first ascend throttle is somehow interpreted differently, otherwise it wouldn’t start to rise before mid-throttle. Or at least that’s what I assume as a still-newbie.
I never take off in ALTHOLD but probably for very first ascend throttle is somehow interpreted differently, otherwise it wouldn’t start to rise before mid-throttle. Or at least that’s what I assume as a still-newbie.