Me using Matek 743 V3
I have a new bug about zoom when I direct the camera to the ground.
My copter is stable in Loiter mode (no-move aircraft), but I’ve got a slow-moving zoom camera image.
I tried all gimbal modes, but I’ve gotten this result.
1 Like
I use CubeOrange, Copter 4.2.3
Please build me firmware for ZR10 I’ll try to test it.
2 Likes
Thanks for your feedback.
Can we request a video for this potential bug, please?
1 Like
This new code is only available in the 4.3.0-dev version. You will need to update.
Hi @cuav_le,
There were a couple of bugs in the parser that I have now fixed. I’ve also borrowed a Siyi gimbal from a friend (just for today) so I’m looking into what other issues exist. So far I’m actually not getting any bytes from the gimbal… I suspect I have the wrong firmware on the gimbal or I need to use some setup application to configure the gimbal to be able to communicate on the UART.
1 Like
May I know what gimbal camera firmware you are using, please?
We suggest that you can update the gimbal firmware to the latest version.
https://drive.google.com/drive/folders/1F78-MDyWRp-SX49dYeDlCCW9kxQp8j8T?usp=sharing
2 Likes
Can you send a set of ZR10s for Randy?
1 Like
Hi @SIYI,
Thanks for that advice. I’ve upgraded the gimbal from 0.1.6 to 0.2.1 but I think the real problem was a bug in the driver. I’ve fixed this now and basic communication with the gimbal is now working! I’ve borrowed this gimbal for another day or two and then provide new firmwares for anybody who wants to help test.

2 Likes
Can you give me the CUAV X7+ firmware?
1 Like
Thanks for your update.
However, we are not getting feedback with the firmware. Should we get an updated firmware?
1 Like
Yes, I’m going to test this weekend and give you results.
1 Like
@SIYI Frank, what about IPX7 standards for ZR10? In my Team, we brainstormed, and we wanted to make a water-resistant version.
1 Like
Please get in touch with me email
1 Like
@SIYI @rvjenya @cuav_le, @Quantoholic @champ8242,
I’ve done more work on the Siyi driver and I think it is at the stage where the basics control of the gimbal’s attitude is working.
I’ve put links to Copter, Plane and TradHeli-4.3.0-DEV binaries for various boards at the bottom of this Pull Request. Note that these binaries are built off “latest” (aka “master”) so while it’s probably safe to fly, it hasn’t gone through our regular beta testing so it might be best to stick with bench testing or at least be ready to re-take control in manual modes.
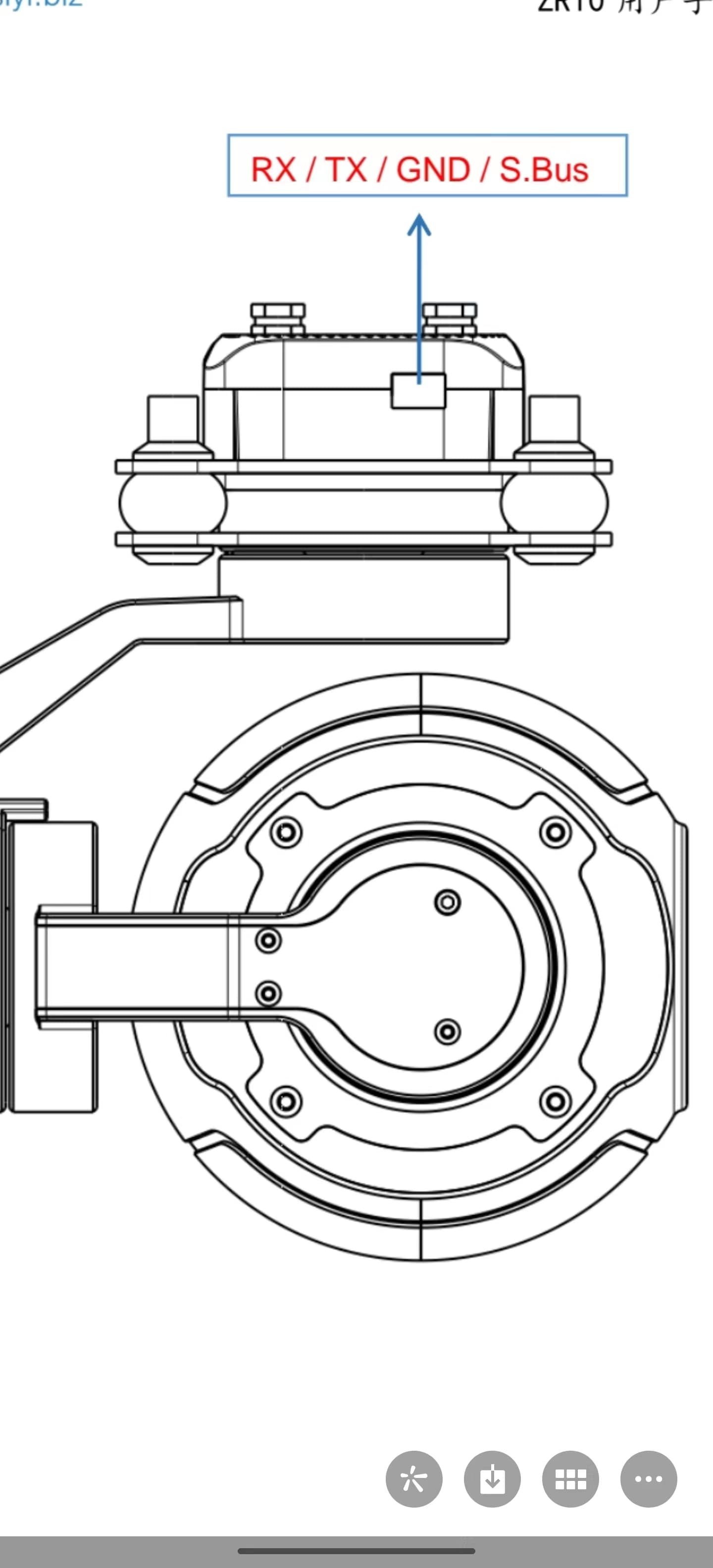
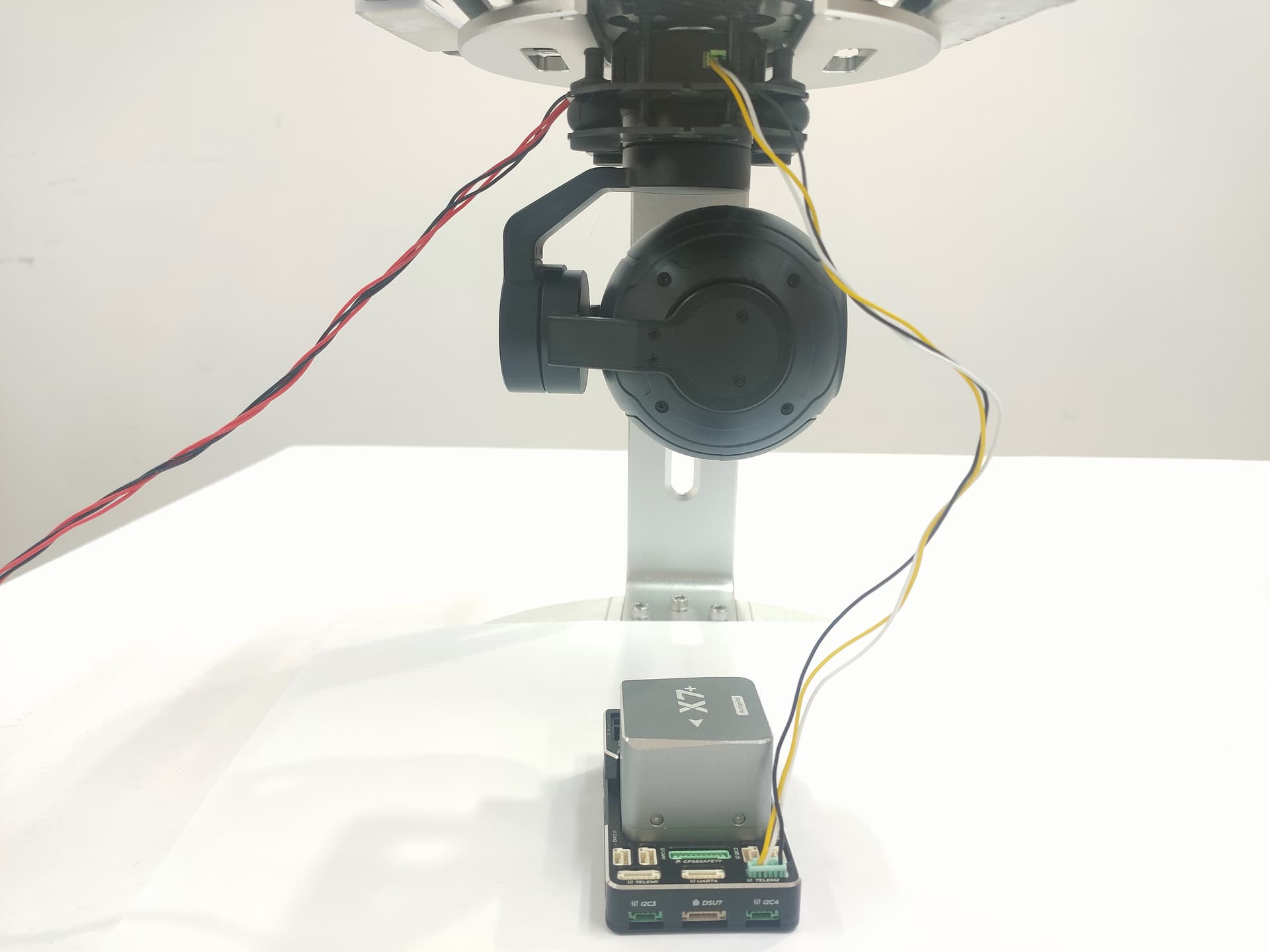
You’ll also see there’s an updated wiring diagram at the top of the linked PR.
I plan to move onto the camera control early next week.
All feedback is very much appreciated!
3 Likes
Hi Randy,
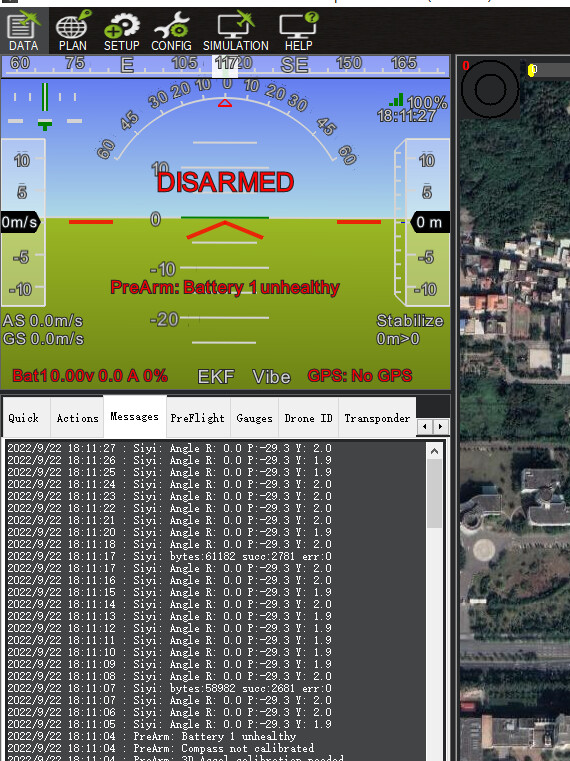
Tested on the Cube Orange, Trad Heli, ZR10 Connects OK.
24-Sep-22 14:07:32 : Siyi: bytes:92774 succ:4217 err:0
24-Sep-22 14:07:22 : Siyi: bytes:90574 succ:4117 err:0
24-Sep-22 14:07:12 : Siyi: bytes:88374 succ:4017 err:0
MNT1_TYPE = 8 (Siyi) There is no 8 yet in the range
If MNT1_TYPE is not used yet, need to reboot to get the params MNT1_*
3 Likes
Thanks very much for testing! I guess the gimbal moved OK as well?
Re the missing MNT1_TYPE = 8 option, I had forgotten to update the parmeter descriptions so thanks for finding that. The new option still won’t appear in the GCSs until the PR is merged to master which could happen as soon as tomorrow.
Txs again for testing
1 Like