I upgraded the Cube Orange on my zero-turn mower from an early 4.1.0-dev build to 4.1.0-beta1 today, and so far, so good! Kudos to the Dev team for their hard work - lots of great updates and improvements.
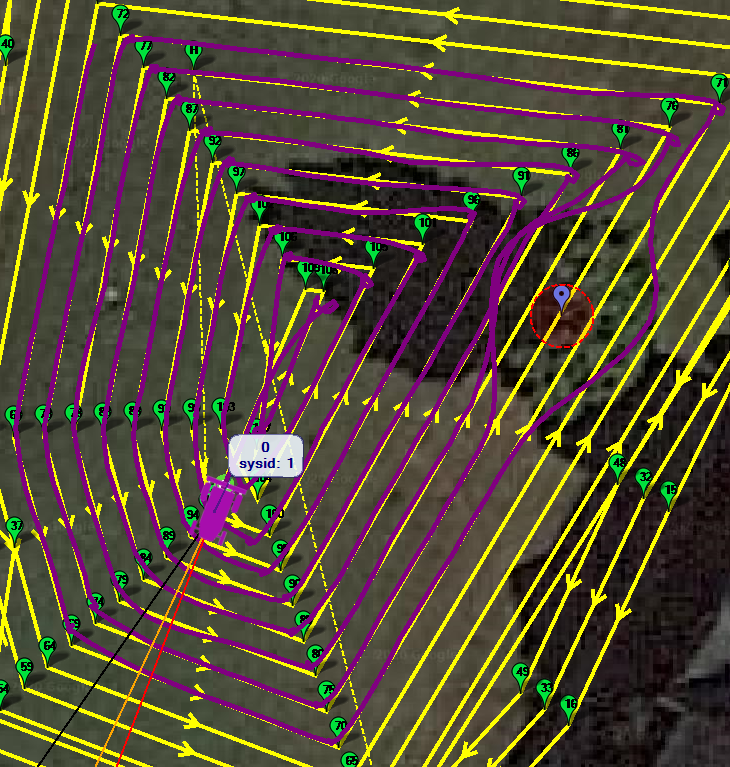
I was finally able to ditch the magnetometer completely! With the dev build, I had to leave a single compass enabled or I’d continuously recieve “Bad Compass Health” warnings, regardless of the selected yaw source for EKF3 and successful GPS yaw setup. Now I’m running 100% with GPS yaw, and it’s tracking straighter than ever.
I’m also glad I discovered the deprecation of EK3_MAG_CAL (which I now have set to 2, never). Instead, EK3_SRC1_YAW must be set to 2 or 3 (I’m using 2 with all compasses disabled/unused). Thanks to @ktrussell and @rmackay9 for their discussion on that subject and update of the wiki.
I’ve mentioned this in another thread and some private messages, but I think the following settings are also worty of note:
GPS_DRV_OPTIONS=1 (forces offboard communication between moving base and rover)
GPS_RATE_MS=100 (fastest update rate - a must for GPS yaw)
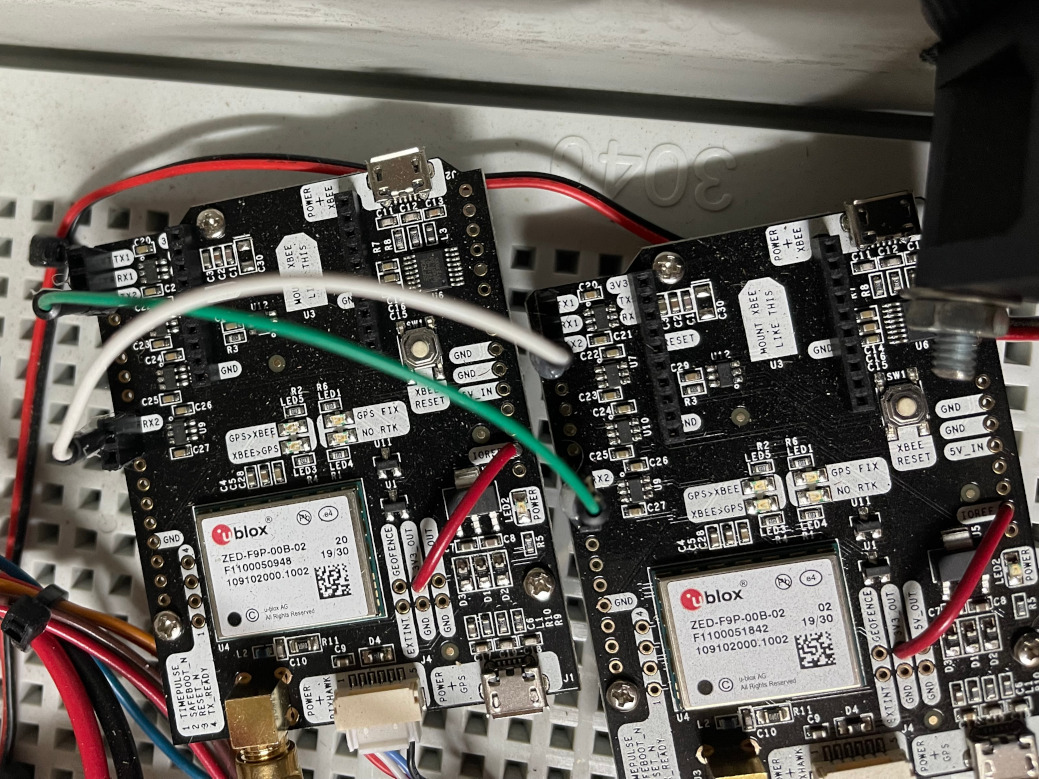
Once GPS_DRV_OPTIONS is set to 1, you must wire the GPS boards for direct communication with one another. On my ArduSimple simpleRTK2B setup (with MAVLink RTCM3 injection), I have TX2 from one board wired directly to RX2 on the other, and vice versa (the green and white wires in the attached picture). I also have IOREF jumpered to 3v3 to provide a 3.3V reference for serial communication (red wires).
I’ve mentioned before that I always leave GPS_AUTO_CONFIG enabled, else the boot hangs at “EKF3 waiting for GPS configuration.” So far, that is also the case with the beta update. I don’t think the GPS_SAVE_CFG option performs a complete save of the uBlox configuration, thus requiring re-configuration on power-up. I’d like to see if I can perform an offboard uBlox config via uCenter, save it, and then disable the onboard auto config at boot time. It’s a minor annoyance, since the boot sequence isn’t really all that cumbersome one way or the other.
Lastly, the beta build updated the Lua script API, and ahrs:prearm_healthy has been renamed to ahrs:healthy (probably among other things). Thankfully it affected only a single line in a script I run, and it was an easy fix.
I will try and stay a little more involved here, at least during the summer season when mowers seem to be a hot topic. I’ll also provide some more YouTube video updates this summer as I gain more experience with the new settings and continue to test and tune.