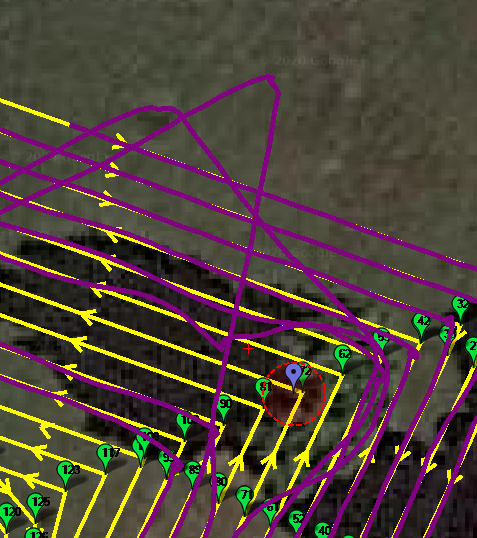
Also, something has gone very wonky WRT fence avoidance. With the same BendyRuler settings as I mentioned in this thread, the mower did not perform well, as you can see in the screenshot. I’m not blaming beta4 just yet, though, because I failed to move two waypoints out of the fence confines like I usually do, but I think it’s worth noting this oddity.
Unforunately, my time to explore this fully is quite limited until later in July (I’m doing some last minute mowing before some other commitments will take me away from this project for a couple of weeks).