Hey, man, you do you. If you want to jump in to help, id be happy to have it. Ive never gotten into logic level stuff, so this will be a fun challenge for me.
i suspect the typhoon controller just send some command to switch the rx to bind mode (LEDs flash yellow)
with a logic analyser we should be able to capture and compare the data sent by typhoon and MAVproxy
Hi Sheng,
are you familiar with the Yuneec hardware? In particular, the recievers?
When you say the LEDs flash yellow - are you referring to the LED indicators under the motors of the air frame? or the LEDs on the actual RX board?
The LEDs on my RX are blinking orange when powered - but I was operating on the understanding that a ‘slow’ blink indicates bound, but not connected. ‘fast’ blink indicates bind mode and solid light means bound and connected.
actually I don’t have experience with yuneec hw.
I just bought 2 SR24 rx from Taobao, very cheap ($5 in total). but I don’t have any yuneec drone, so I can not capture the data.
after power on, the led on my rx is also blinking slowly. according to some video, it should flash quickly when in bind mode.
how did you send the bind command to your rx?
directly send to the rx through a usb serial, or through a flight controller?
In ArduPilot/ardupilot/blob/master/libraries/AP_HAL/utility/st24.cpp
I can not find any command for bind, so even ArduPilot can accept the bind command received form MAVProxy, it is not able to translate and send the correct bind command to the yuneec rx
according to yuneec’s document, the link command should be send to yuneec FC0, FC0 will “translate” it to some other command which yuneec rx can understand.
This is the actual command I’m interested. Sending this command directly to SR24 through a usb-serial cable should switch SR24 to bind mode.
yes, you are correct. the st24.cpp does not have bind functionality. It only has protocol functionality after binding some other way. @tridge confirmed this for me:
I have been sending the MAV_CMD_START_RX_PAIR according to the Yuneec developer page. See post #8
To do this, I have been using MAVproxy connected to my flight controller via USB. see my post #8 and #9
However…none of these attempts have been successful. Likely because I thought the MAV command was all the RX needed.
Do you have a link to the document you are refering to? If this is the case - then this confirms that we really need to get our hands on a yuneec flight controller (“FC0”) and capture the bind command and also explains why my attempts to send the bind command to a Pixhawk is not working, lol.
I just guess from this picture

you can see the sr24 is connected to FC0, so the actual bind command received by sr24 must be sent from FC0
finally i managed to put my sr24 to bind mode, what I did is:
- connect sr24 to computer via usb serial cable
- open that port (115200, n, 8, 1) with any serial port tool
- send hex data 55 55 08 04 00 00 42 49 4E 44 B0
then I saw my sr24 start blinking quickly
1 Like
Unfortunately I don’t have a TX to bind with it.
could you verify if your TX can bind with sr24 using above approach?
WOW! Good work!
I can test that, but I am a novice with regards to serial connections. Can you give me some guidance on how you connected it? Maybe a picture or diagram of the wiring? Is it as simple at TX<>RX, RX<>TX, Vcc and GND? only thing is i think the sr24 is 3.3v - isnt USB 5v?
Any recommendations on serial port tool? Ive used PuTTy at work a few times - will that do the trick?
yes, actually 3 wires are enough:
- pin 1- Black, GND;
- Pin 2 - White, 3.3V;
- Pin 3 - Gray, connect to TX of PC
- Pin 4 - Yellow, no need connect. You can connect it to RX of PC, but in my testing i didn’t get any response from it
regarding the tool, I’m using https://apps.apple.com/us/app/serialtools/id611021963?mt=12 on Mac.
I believe putty should work as well
Seems simple enough. Ill try it this weekend!
@ysome - i cant seem to get my SR24 to react to
I am using RealTerm set for 115200, n, 8, 1. But there are also a ton of other settings that i dont have enough knowledge to understand.
I accidentally put 5v on the RX/gray wire…just got the wrong pin. TX light on my serial/usb converter flickers and the terminal sent it, but no reaction on SR24. Did I kill it with 5v on gray?
I tried an OSEPP ftdi and another no-name silabs converter
only these 115200, n, 8, 1 is important for serial connection, you can just ignore other settings.
in my testing it is quite strait forward.
I find somebody in China has already hacked the entire yuneec protocol, he has developed a tiny board which can:
- switch sr24 to binding mode without yuneec FC
- convert sr24 signal to standard PPM or SBUS signal
- 5 ch PPM signals output, for servo and/or esc
- 2 way communication between FC and RC
- control yuneec gimbal
it is interesting, but only a few proto board available, not for sell yet.

Do I need to convert the hex to ascii or anything?
no need, just send those 11 byte data as hex.
so your serial tool must support sending hex data.
you shoul be able to see TX count 11 at somewhere on your tool
I have not been successful with the hex command, but I am not fully confident I am getting the command sent. is there anything special about hex format? as long as the numbers and letters 55 55 08 04 00 00 42 49 4E 44 B0 get sent in that format, it should be all good, right?
maybe i am just second guessing myself…
The TX light of my serial converter flickers but its a really weak flicker
the tool i’m using is CoolTerm for mac
serial port settings:

then, send it out as Hex:
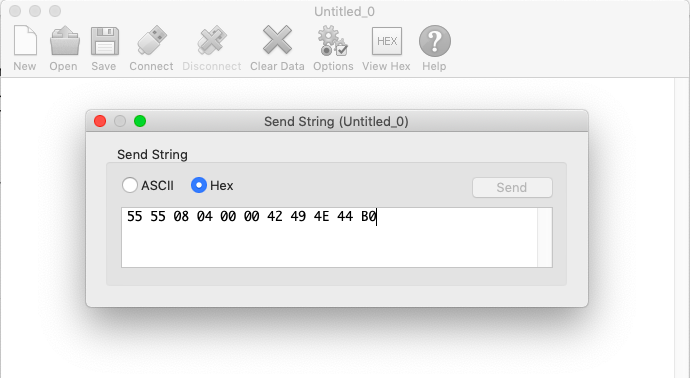
that’s all
I’m already able to bind sr24 with st10c transmitter using this approach.
if you are still having problem, either your sr24 is faulty or wrong wiring
another possibility is that your sr24 module is for tx but not for rx.
you know yuneec use the same sr24 module in both the transmitter and drone
it is difficult to judge if one sr24 is for rx or tx from its appearance, since only the firmware inside is different.
It worked! I tried X-CTU’s serial console which is much simpler. I clearly had no business with the advanced features of Realterm.
I got the fast blinking light, then put the ST16 into bind mode and it turned solid.
…Now…I cant seem to get this pixhawk to recognize the receiver. Is there anything required to activate the DSM port?