hello,
I made a 3 inch quadcopter with speedybee f405 mini and flashed latest firmware 4.5.2.
After reading the documentation, i saw yaw usually don’t required tuning.
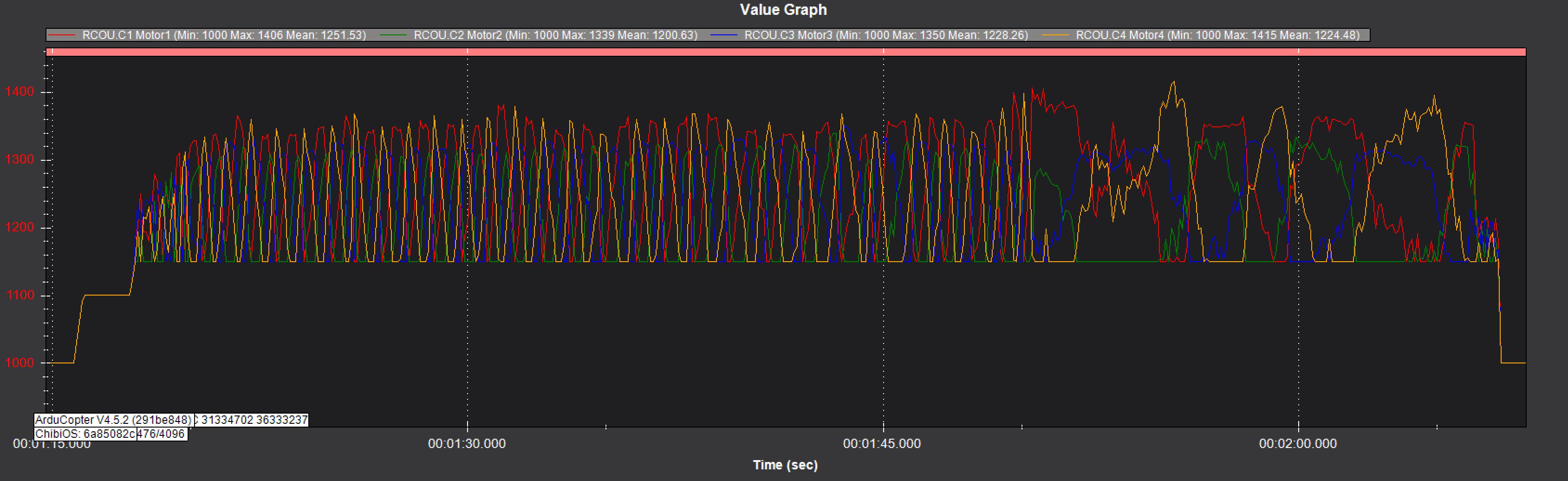
quad is flying ok, but i feet like some noise is coming from motor. after landing i checked the motor , as per the layout motor 3 and motor 4 is more hot than motor 1 and mot 2.
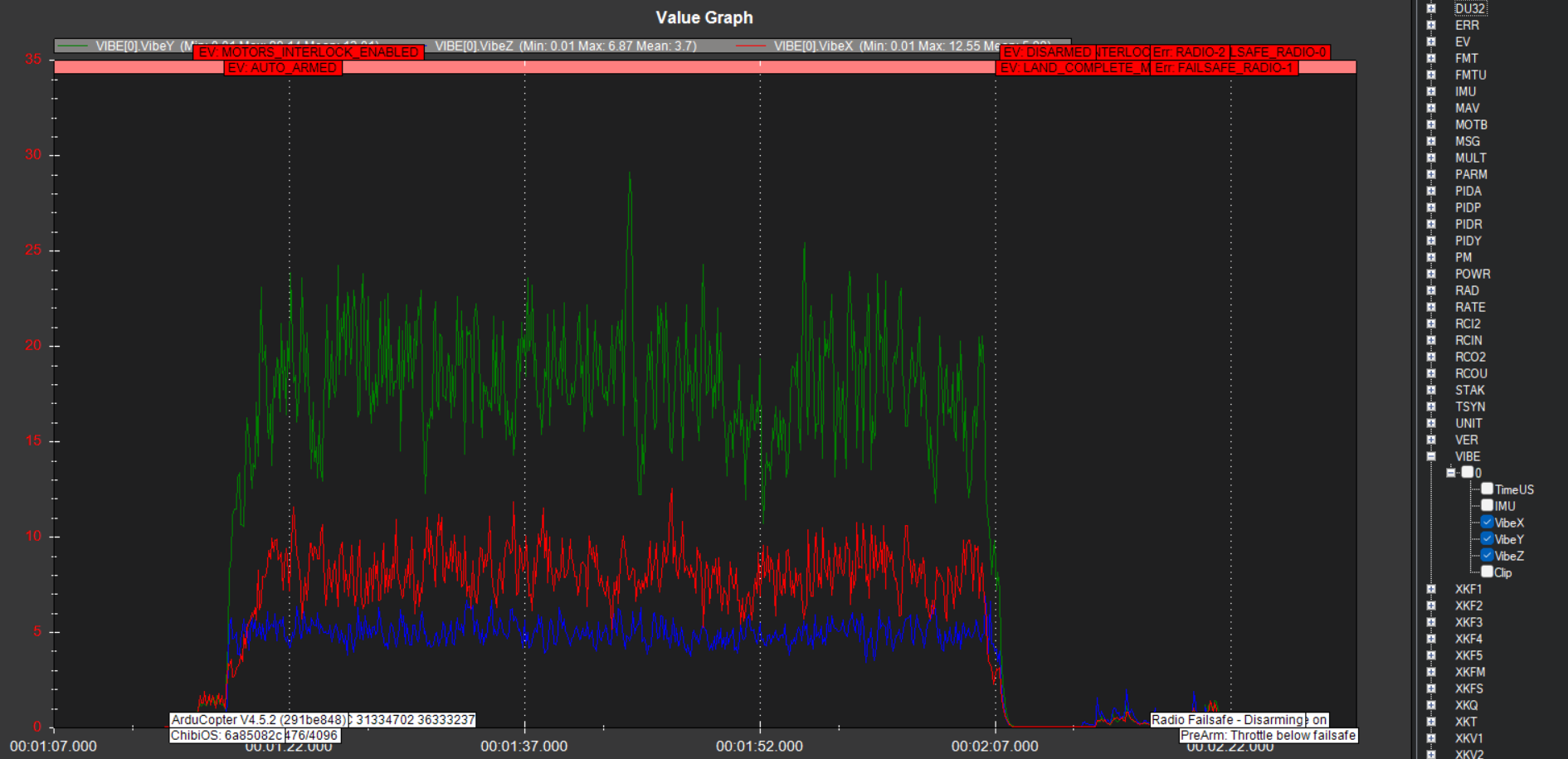
frame was good and properly screwed . motor & propeller screwed well. also noted the vibration status but it value come under 30.
question : Do i need to tune this quad before flying in alt hold and pos hold.?
also on log file it show radio failsafe in some point. i don’t lose control throughout flying. and i have telemetry connected to laptop , there is no warning showed on HUD . any further details required for this please ask.
Do i downgrade firmware version… On it’s title show it is based on ardupilot 4.4.x.
I am using 4.5.2…
Or i can use same method to tune this .
also could you please specify where i can see the vibration on log file that you mentioned in last .
Measuring Vibration — Copter documentation,
But here they saying it 30m/s/s are acceptable. that’s make me more confused. that’s why i asked him where i can find the vibration that he mentioned. ( Is there any option for vibration checking other than VIBE in log)