The Yaw drift on APM is much much higher than that on Betaflight/Cleanflight when not using a magnetometer. We observed drift of about 1 degree in 1.5 mins on betaflight when sitting on the desk and in APM 1 degree drift was observed in about 10 secs. Tested this on various autopilots and the performance is the same. Our guess was that this is because of the EKF not tuned correctly when not using a magnetometer, so we tried reducing the noise values of gyro and acc but it didn’t really make much of a difference. Any ideas?
Also, I’m operating indoors with no optical flow and no GPS.
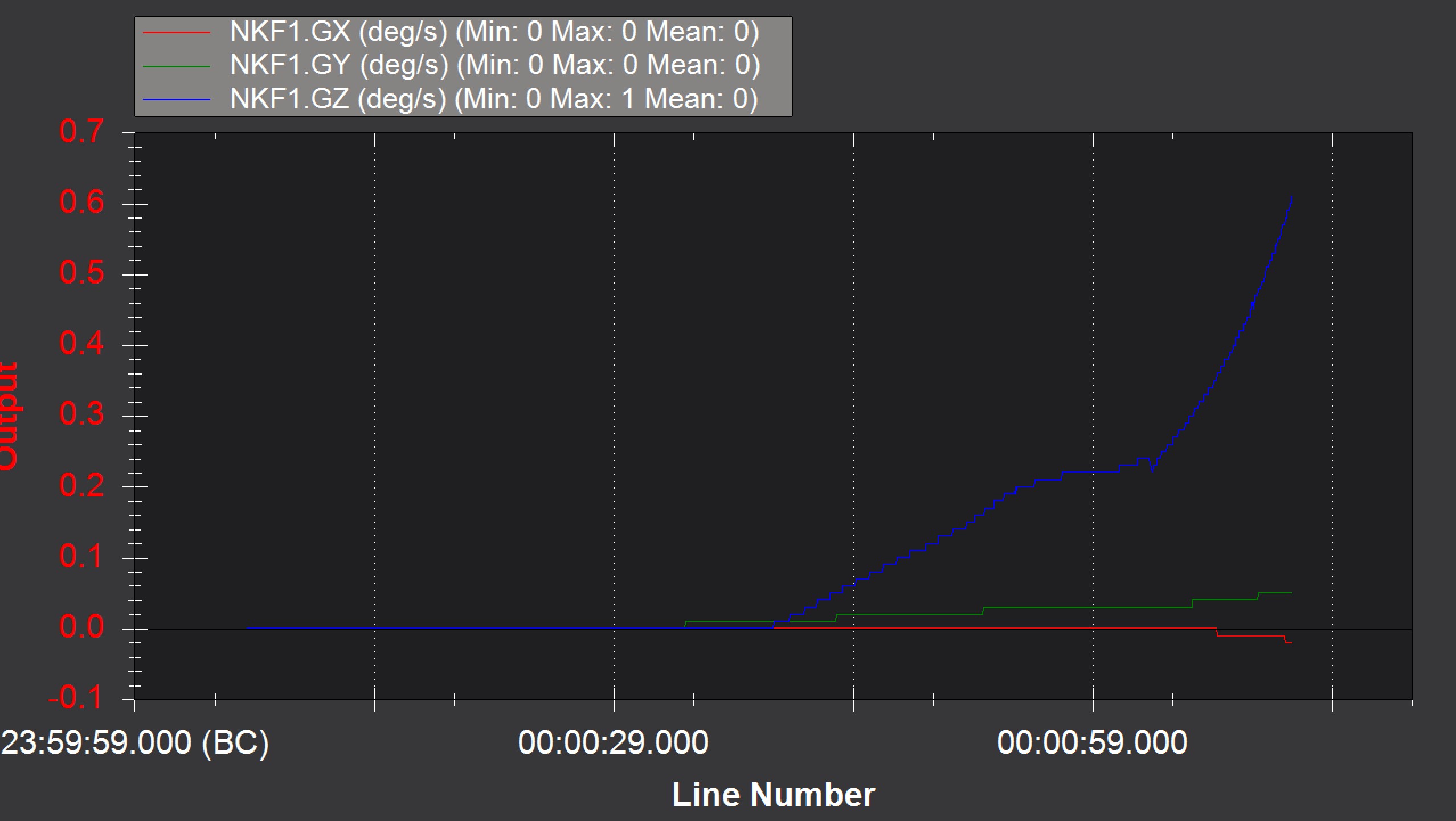
Ok, Here’s what I think. Even if you disable EKF usage for attitude estimation using AHRS_EK2_USE = 0, I think the attitude estimation using DCM uses gyro scale and biases updated from EKF, making the drift crazy. Here’s a snapshot and the log accompanied.
Log file: https://drive.google.com/file/d/1DzcJAEhe-XuS8-QOIuq_FahJyWr6ZFtW/view?usp=sharing