X7 will be CUAV’s first Autopilot using STM32H7 processor. It will not only update the processor, also bring new sensors and high-speed USB (480M), which will make your flight experience better. It is undergoing flight tests, if you have more good comments, please comment below.
NOTE:
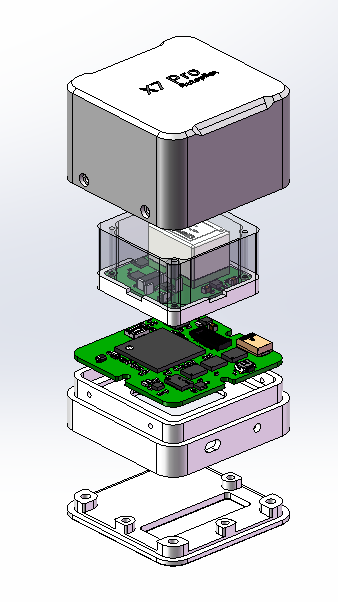
X7 pro uses a similar V5, modular design.
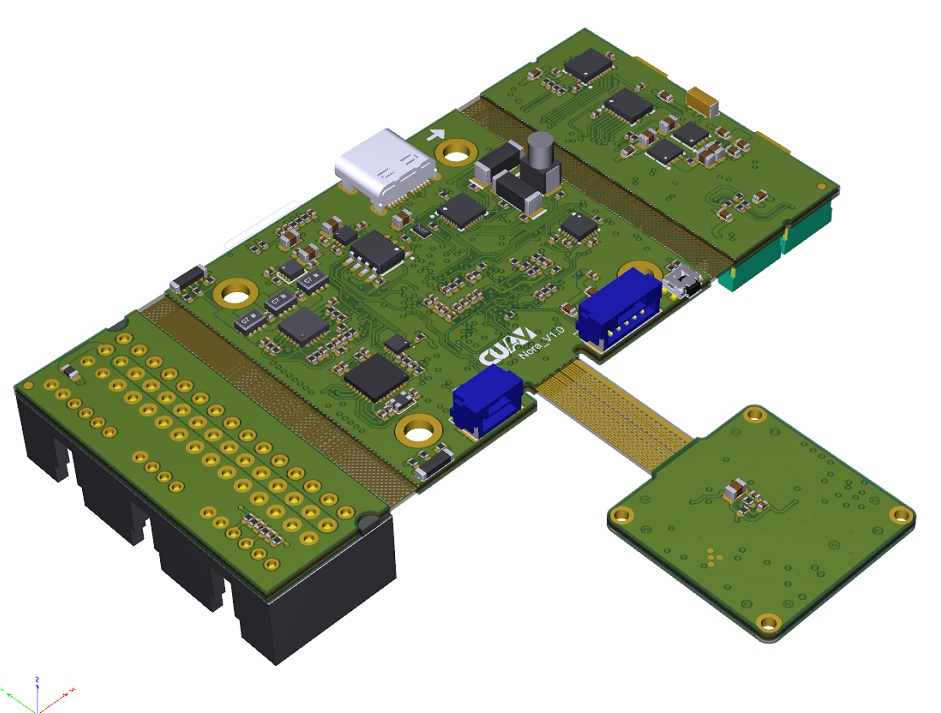
Nora is not X7 nora, it uses the same side design as the pixhack series Autopilot. They all have internal isolation
About CUAV:
Pixhack (v2) was released in 2013 with a new design: side interface (GH1.25) and internal isolation.
Pixhack v3 (x) released in 2015, new design: triple imus and temperature compensation system
CUAV v5 was released in 2018 with a new design: TYPE c interface and modular design.
V5 and v5 nano were released in 2019, using the same design as the v5 autopilot but optimized for modular design, making the DIY backplane easier.
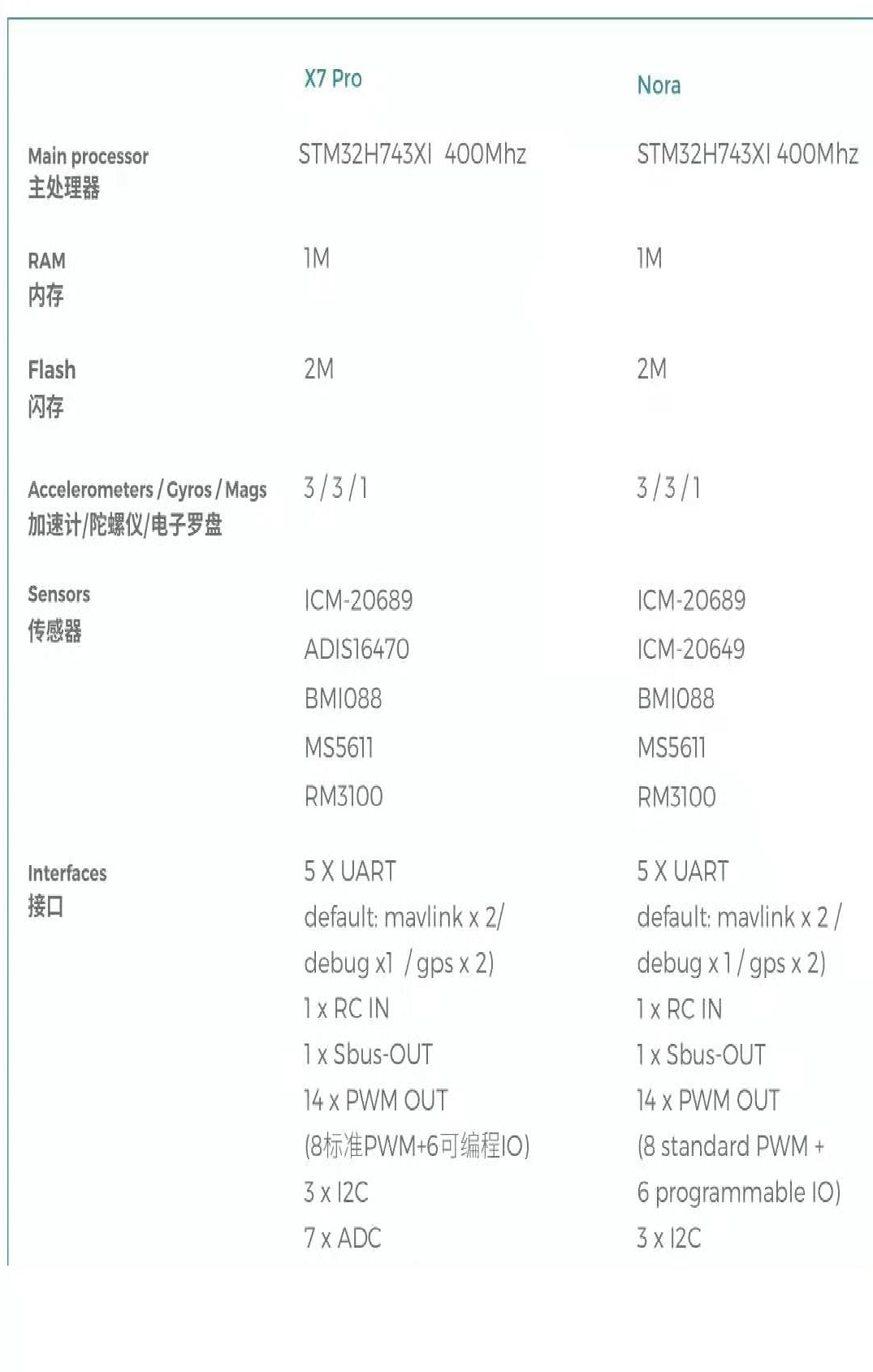
In March 2020, the X7 series flight controllers will use innovative high-speed USB (480M) and industrial-grade sensors to make your flight safer and log download faster.
For the future, we know our deficiencies in the international market and lack of publicity, and we will open up the international market with our partners. We welcome your participation. At the same time, we welcome you to develop software and hardware for X7 flight control. If you need X7 for software testing, you can tell me.
X7 design reference: https://github.com/cuav/hardware/tree/master/X7_Autopilot.
I’m happy to see more robust, temp. compensated and high quality sensors on board!
The variation on consumer grade IMU and compass units is horrible. Have to toss out 10-20% units due not meeting the spec.
For example gyroscope in run stability on some units is so horrible that they will trigger “gyros inconsistent” in minute or two after reboot even if they are temperature controlled.
A pity you copied the hardware form factor of Pixhawk2 which is its biggest weak point! Too bulky and connectors on top. You had it right with the previous pIxhack having side connectors instead and a rectangular box shape.
@Hugues You need to understand it, its size and appearance are different from pixhawk2. The internal hardware composition is different, even the connectors of their base boards are different. I don’t know what is your opinion? From your point of view, you used the keyboard to enter the font, and I also used the keyboard to enter the font. Did I copy you? What you need to know is that we have obtained a patent for appearance.
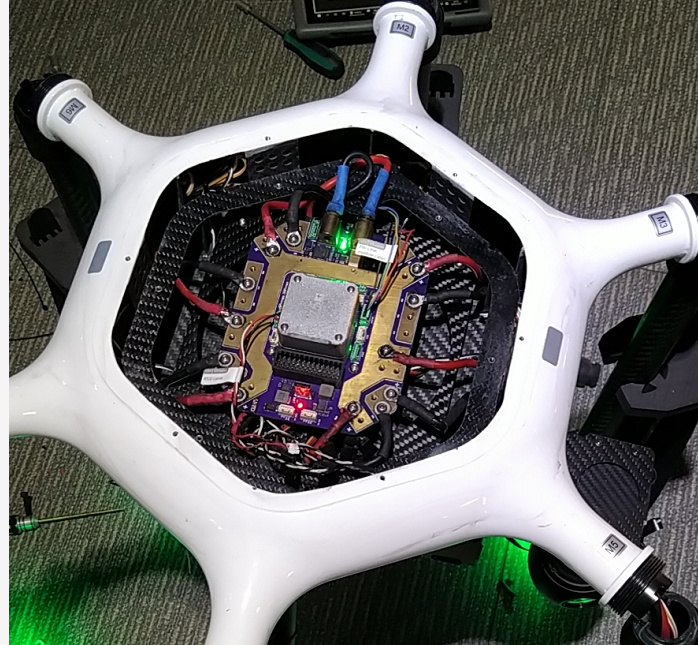
From the posted picture it is hard to see how it is different than Pixhawk2 as it looks to be the same shape. In any case my opinion is that a cube requiring a carry board is not optimal for building large professional drones based on my experience where I build large pro drones in multicopter and plane versions. We are always looking for the most compact and practical form factor, which happens to be a slim rectangular box with side connectors.
As you said, you like slim rectangular boxes; but it is undeniable that the sandwich structure has also been recognized by some users, and we have not given up the long rectangular box and side interface (Nora uses a structure similar to pixhack); we took into account The needs of more users; not just one.
IMO, the V3/V3x series remains the best form factor for helicopters. Even on large piston or turbine machines there is limited spaced between the frames. The end connector format fits perfectly. Nobody likes a rat’s nest of wires sprouting out of the face of the controller’s carrier board. Might be more convenient than building a control with proper pin headers on the ends but lowest vibration is transferred from wiring to the IMU’s with end pin headers.