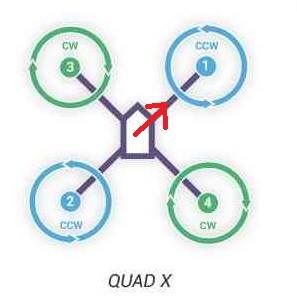
i am trying to get an X quad in the air. Pixracer mounted 45° to the right. External compas pointing to the front.
so i set
ahrs_orientation 1
COMPASS_ORIENT none
frame X
quad
Hud in Mission planner looks fine, motors are turning in the right direction, props are on the right way.
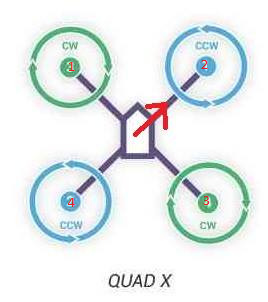
when i arm the copter and trottle up it always tryes to lean to the right. so motor 3 and 2 are turning more.
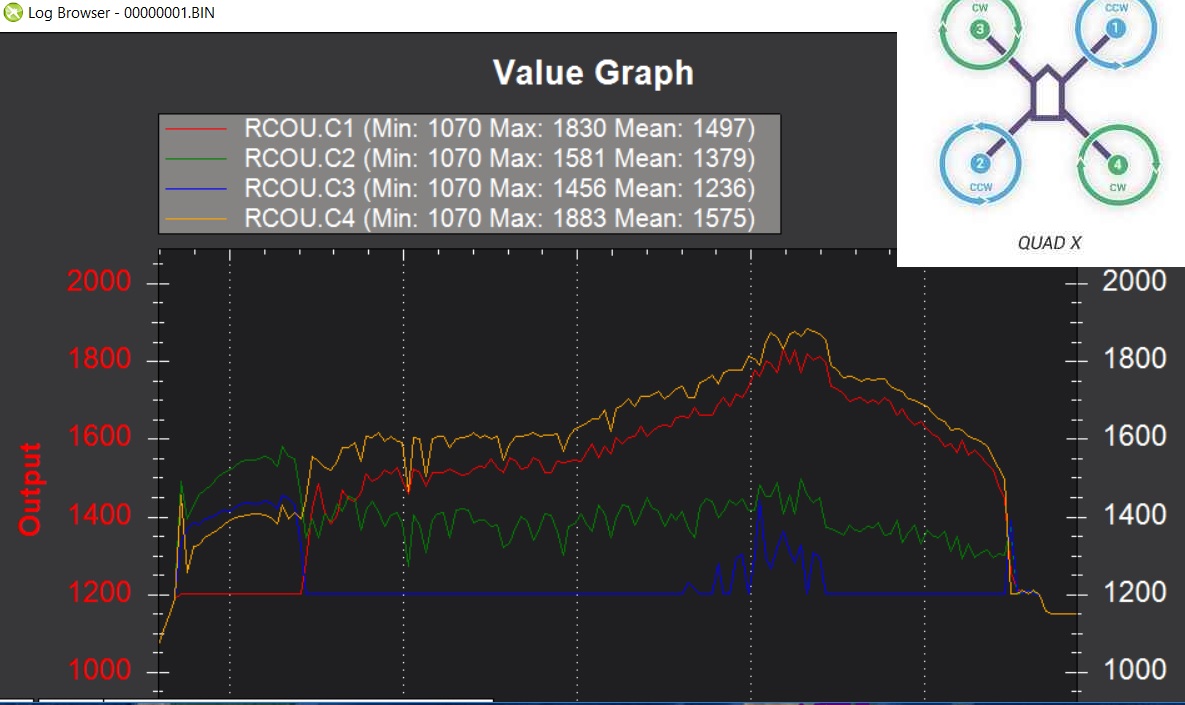
in the logfile motor 1 and 4 are getting higher pwm values… this does not make sens at all.
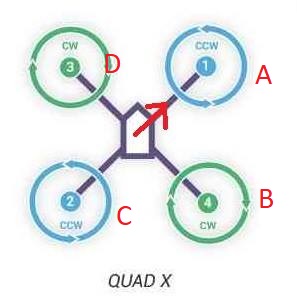
I’m not sure exactly how your Motor test works, but in the video it looks as though you’re testing each motor in sequence. And the sequence goes clockwise in the video. If the motors test is going 1->4, shouldn’t it have been in the order of the alternating pairs? From the video, it seems like it is more
Maybe the motor test takes the position of the motor into account and actually does 3->1->4->2 ?
I does seem suspiscious though that RCOUT supposedly isn’t applying as much power to the 2+3 motors, and yet those the motors that are throttling up, and the motors (that the log shows are being throttled up) are not.
The obvious first :
Have you calibrated the Accel’s.
Have you calibrated the ESC’s?
The log and the video tell me you have the motor numbers wrong.
Have you tested with props off?
Take the props off, arm and raise throttle to a low level so it will not disarm.
Tilt the frame.
Do the high motors slow down and the low motors speed?
Do this for each axis.
The other thing is, if you have everything right and the above test passes, the initial launch of a new build cannot be done slowly.
You need to punch it off the ground.
Not high, no more than waist height, but you need to get it airborne quickly as they always lean.
A square of cardboard on the grass would help keep the props out of the grass and aid takeoff.
acc calibrated → success. Hud in mission planner does exactly what it should.
Esc are calibrated → Blheli min 1100 max 2000, also put that values in on arducopter. trottle response is perfect.
No not tested with props off, i will do that now.
I am quiet a experianced pilot several hundert flight hours yes and i know that it needs a bit of punch. Sadly this does not feel right → more power and the quad will flip and its vibrating enomously. there is something wrong.
The log and the video tell me you have the motor numbers wrong.
100% what i also think. motors are wrong. but i have connected everything right AND checked it with missionplanner motor test.
In the new firmware and Mission Planner you remap the motor outputs.
Your haven’t accidentally been remapped have they?
And you Tx.
If you correct the roll with the sticks does it get better or worse.
try this with the props off, I always do on a new build.
Use your Tx and check that the correct motors speed up and slow down when you roll and pitch and yaw.
amilcarlucas is right you can’t have the flight controller at 45deg without adjusting the AHRS orientation. It needs to be aligned straight ahead and dead center.