This is my latest build, the worlds smallest brushless octo-copter (as far as I can tell) running Arducopter (of course) on the kakute f7 AIO.
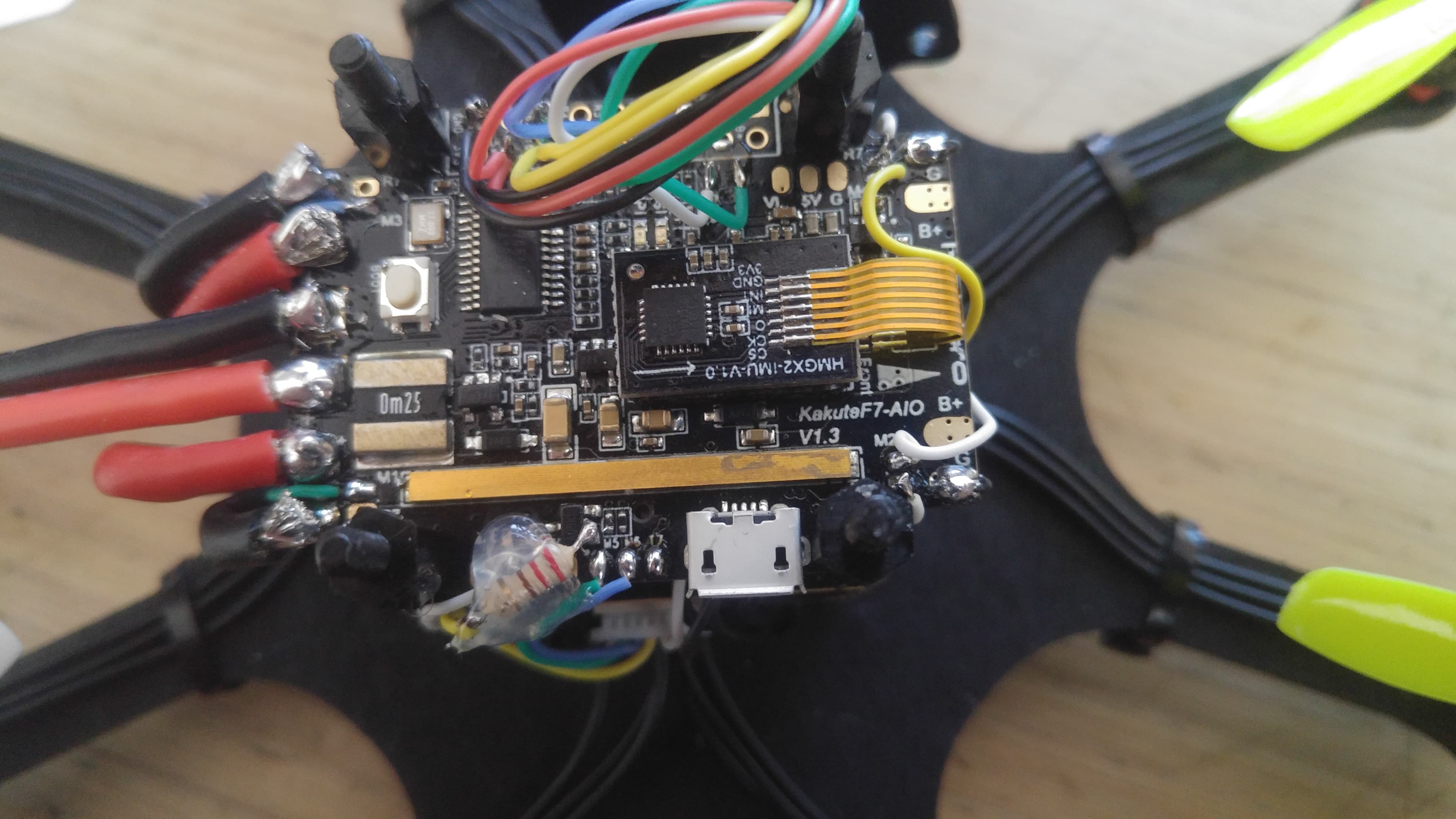
Build is very simple, custom frame laser cut out of ply. Eight E-Max RS 1106 4500kv with 2.5 x 3.4 four blade props. Two generic blheli32 four in one ESC’s. A Kakute f7 AIO, M8Q-5883 compass from Matek and a FrSky R-XSR.
The f7 processor is the key to this build it allows FrSky telemetry to work without the need for a inverter and it’s versatile pin functionality allows extra pwm outs to be added. A bit of trail and error with the hwdef.dat allowed two extra pwm outs to be added using the led and buzzer pins. The LED pin works straight away however to get the eighth pwm on the buzzer pin you must bypass the amplifier transistor. I soldered a 220 ohm resistor to the left pad of the transistor and the other leg to the esc wire. Resistor is probably not absolutely necessary but are built into most flight controllers for protection. I have all eight motors running Dshot with esc telemetry.
Next step was to get the motor order worked out, test flight and then autotune. It flys very well straight off the autotune giving just over 5 mins on a 1400 mah. It is full capable of doing missions but is missing a full telemetry link.
I’m quite pleased how it turned out, not the most practical of craft but a fun build and good to fly. Not quite race quad power but surprisingly close for such small motors. Some more fine tunning of parameters to be done in the future, maybe i’ll add telemetry, or 3D print a ‘lid’ so the flight controller is less exposed.
