Sir,
Thanks for your reply, if total 5v current requirement less than 3A including two servos, than can we provide all 5v power requirement only from your “mini power distribution board build in 5v UBEC” , simply power to servos from "mini power distribution board.
If thats possible than , no need heavy esc+bec , need light weight BEC only, The compromise is single power source for FC.
Sir,
Your mini power modul is UBEC , its look power module and FC are very closely fitted with each other, I think power switching vibration of ubec may disturb to FC . . . Please think on that point for vibration problem which seen in log.
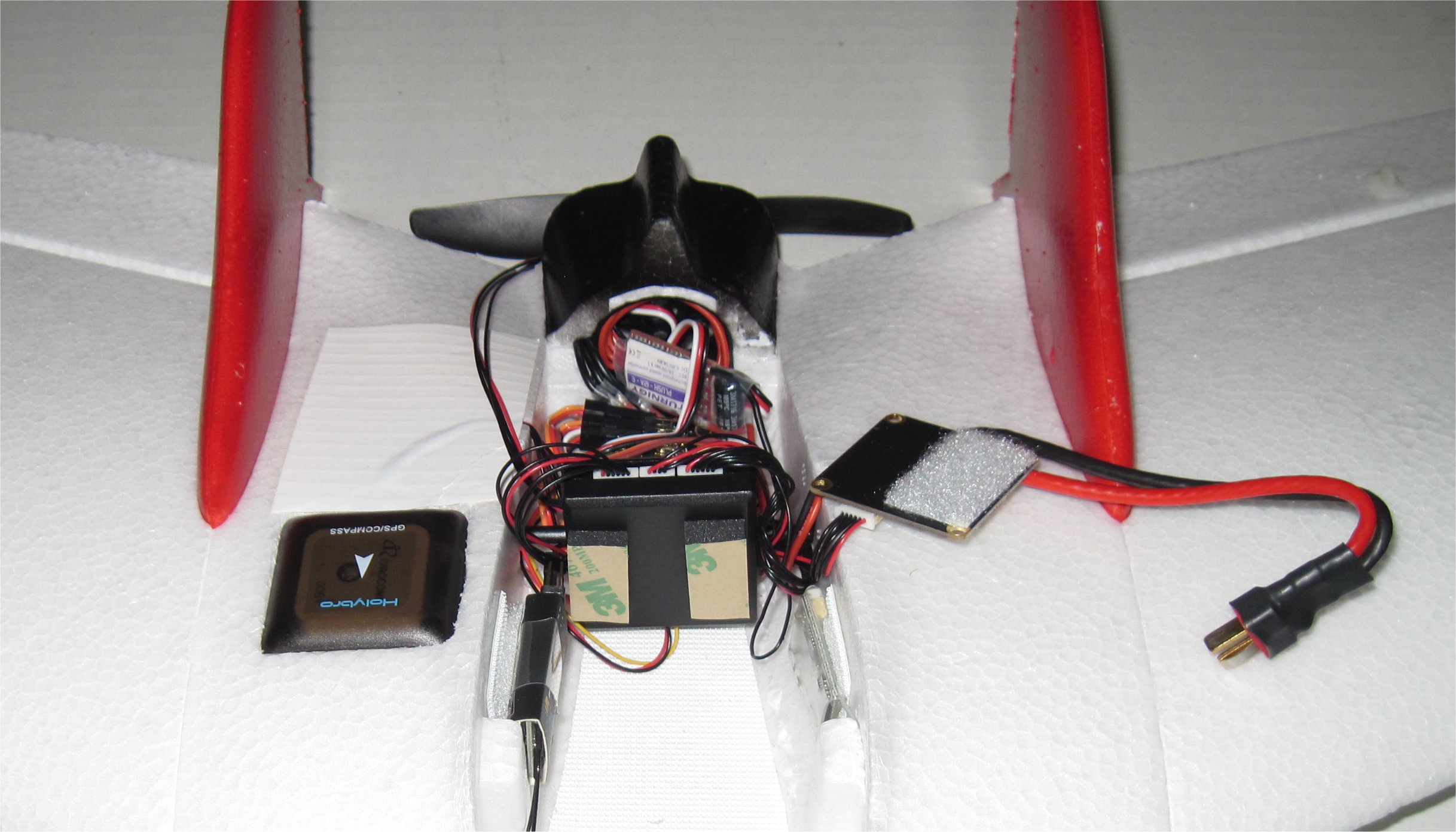
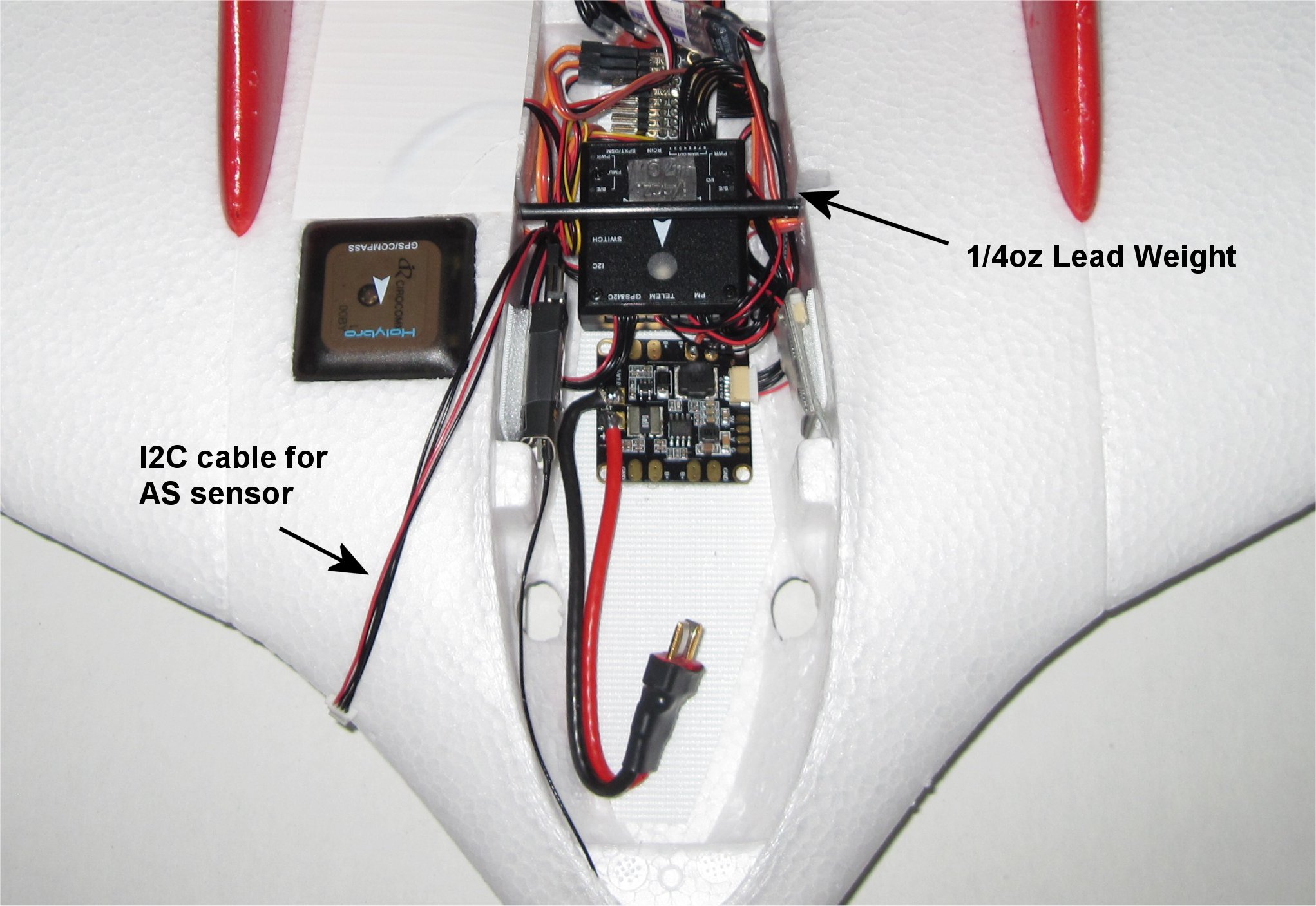
I discovered that the HolyBro PixFalcon Combo came with several 3/16" (5mm) thick 3M foam mounting pads. I removed the Velcro from the bottom of the PixFalcon and mounted it using the thick foam pads. I then added 1/4oz (7g) lead weight to the top of the PixFalcon to help eliminate vibrations. It is very near the CG so it shouldn’t offset my balance.
While I had the PixFalcon up, I plugged in the I2C cable for my future digital AS sensor. The HolyBro kit comes with many extra cables and a micro OSD board that I have not yet used.
1 Like
Good . . . . Let see flight result soon . . .
with those mounting pads, it would be better to cut them into smaller pieces and have 4 small pieces, one in each corner. Using two larger pieces and not being in the corners means you are conducting more vibration than needed and leaving a bit of a see-saw effect.
I think you’ll find what you’ve done will be a big improvement though - this is just a comment for next time.
1 Like
I forgot to mention that sticking the lead to the bottom, between the foam pads, can be better. There is more room and it doesn’t obstruct any cables or LEDs. The lead just needs to be thinner than the pads. It also allows you to center the weight (ideally it should be in the middle)
1 Like
Tridge,
Thanks for the additional suggestions. I’ll save these for my rebuild, if needed.
I discovered that my 11g Short Prop Adapter (middle image) is poor quality and is causing excessive vibration. I’ll try swapping it out with the second one I bought to see if it reduces vibrations on the bench. If not, I will order the lighter Prop Saver with Band which weighs only 2.5g.



@GregCovey I’m using a tmotor f80 on my z84. The motor shaft is threaded and comes with a nylon stop nut. The motor is about 60grams and tmotor claims 1600g of thrust with a 3 blade 6045 and 4s pack. I skinned mine in carbon fiber so it’s also a little heavy.
I’m curious to how you launch yours? Auto takeoff, fbwa etc.
https://drive.google.com/file/d/0B9egjsa9aEXWS1RKWk5lVTBJSW8/view?usp=drivesdk
https://drive.google.com/file/d/0B9egjsa9aEXWTm1oZUdfSlJfc2M/view?usp=drivesdk
https://drive.google.com/file/d/0B9egjsa9aEXWRzBCMmY5ZlpnTWM/view?usp=drivesdk
Hi,
A t-motor is a good solution. Most 250mm quad motors also have the built-in prop shaft so that is another good solution. I decided to initially go with the popular AX1806 motor which is only $7. It seems to power the Z-84 nicely at only 1.5amps.
I use FBWA or MANUAL mode to launch the initial plane tests. Once converted to a QuadPlane, that usually changes to QSTABILIZE.
Remember that when using Plane v3.8.x, the SERVO_AUTO_TRIM levels the flight trims for you automatically. It’s a very cool feature!
Cheers!
My second prop adapter was much better balanced so I will stick with the AX1806 motor for now for forward flight. On a re-build, I can see the merits of using a motor with a built-in prop hub like the RTF 2004 which I am using for my quad rotors. Both are 1806 in size with similar Kv.
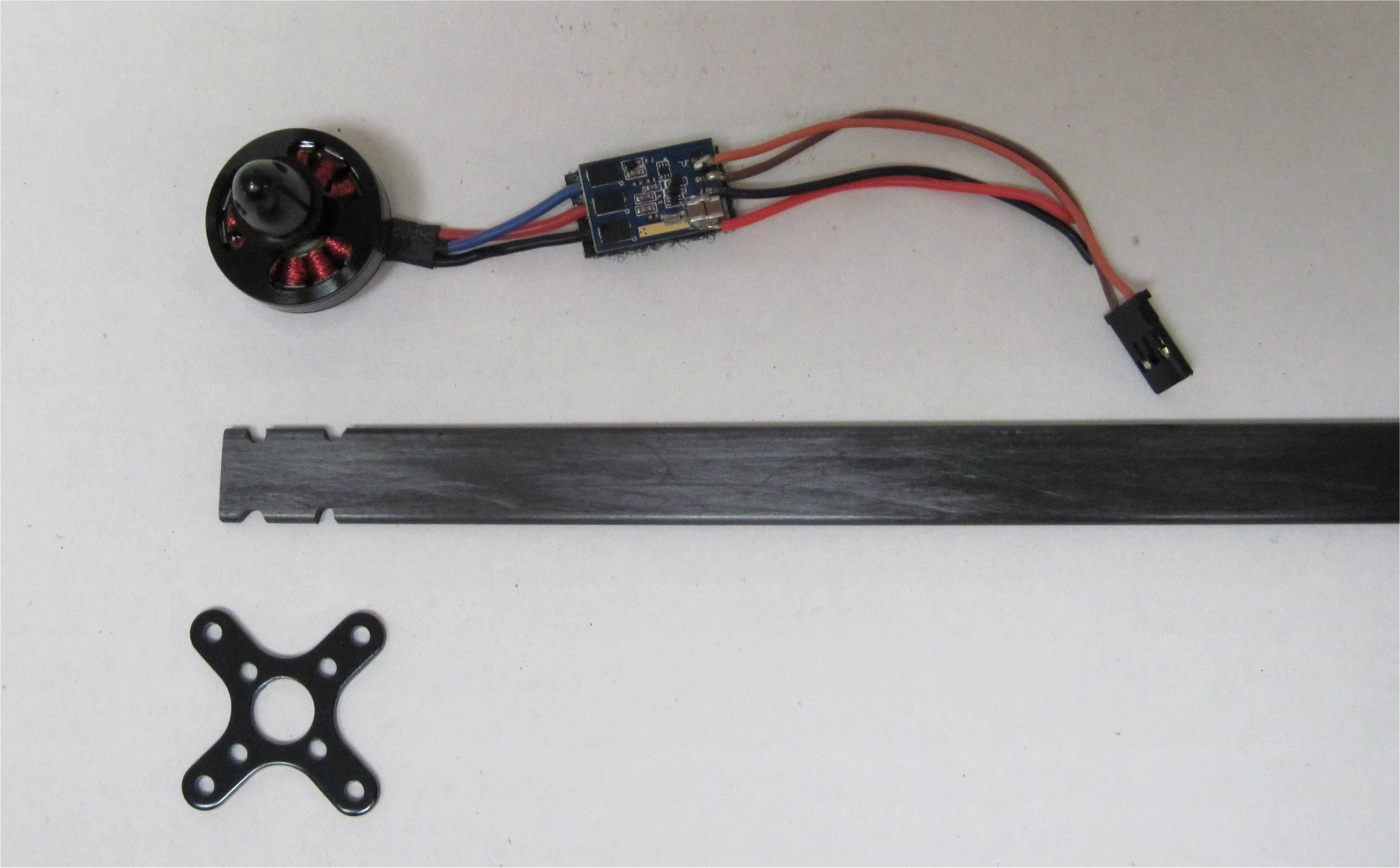
Below is my concept for a minimal weight quad rotor assembly. The 3mm x 15mm flat carbon bar needs no motor mount and can be glued directly to the Wing Z-84 using Foam-Tac. The tiny HUG ESCs are just shrink-wrapped in place. I’ll weigh the bar with both motors and ESCs mounted once I determine the length.
I used the x-mount as a template to add slots with a Dremel tool in the flat carbon bar.


1 Like
I liked your flat strip of carbon fiber concept , that is good in the view construction . In quadplane mostly seen use of carbon fiber tubes , tube has high stiffness but tube has high volume.
In my last Quadplane, I used Teak wood strip with epoxy coating, aprox size was 4×23mm. That strip worked for 5ft wingspan and weight of model was aprox 1.6 kg. I faced some problem of vertical vibration of strip but worked not bad.
Tridge,
Here is the log and config file from flight #8. It had the usual porpoising when going into the wind. The vibrations are now greatly reduced!
WingZ84_ParamsFlight8.param (16.0 KB)
Flight7 Log - 25meg
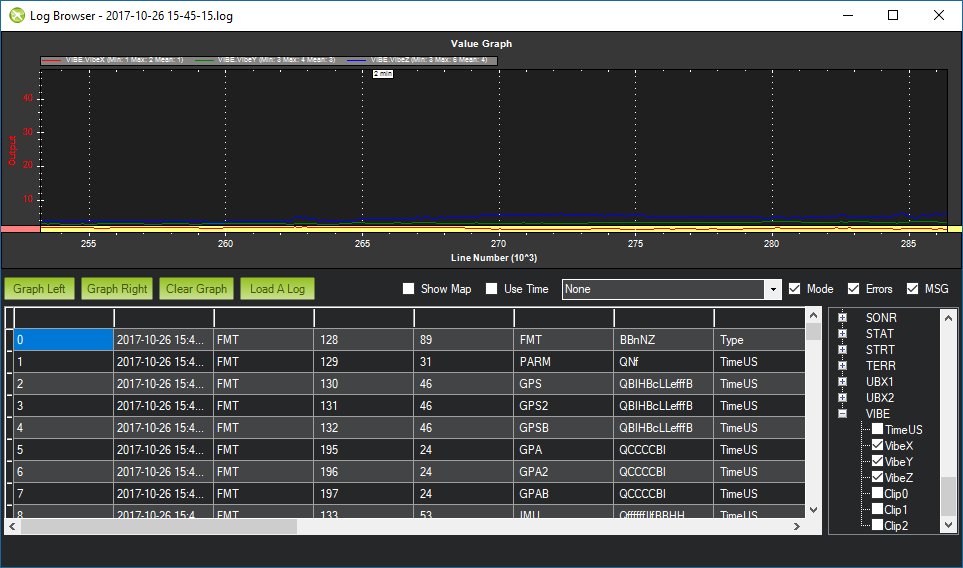
This was a plot of my original vibrations.
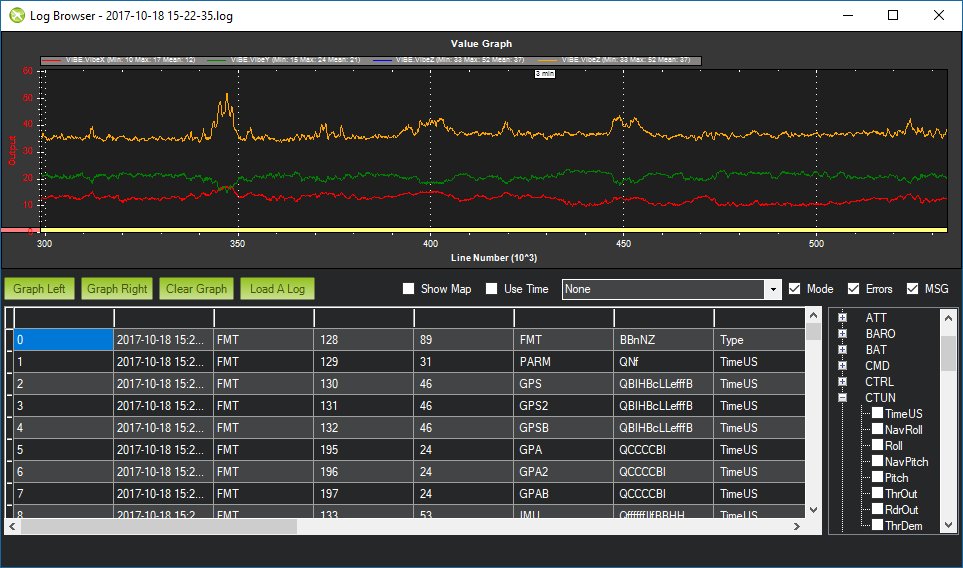
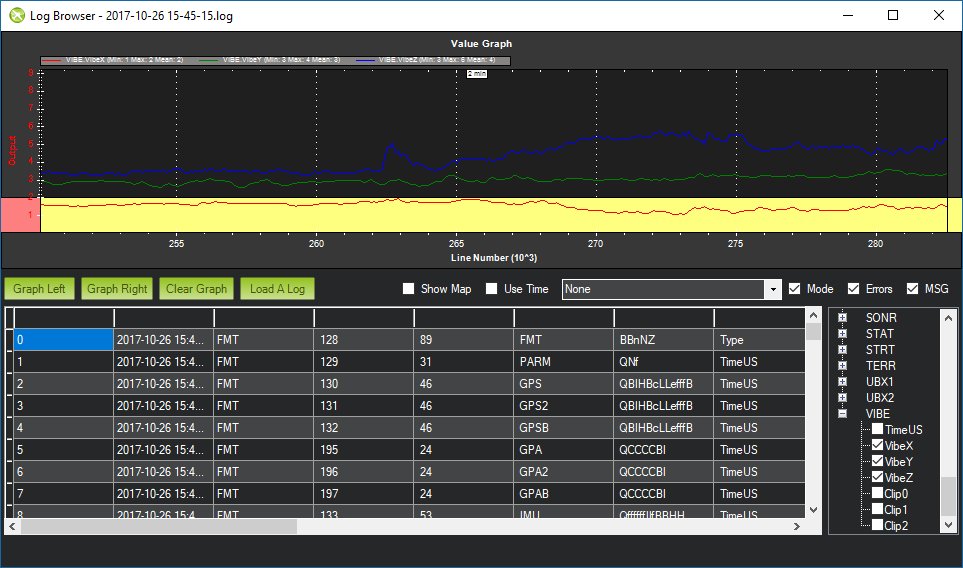
Here is a portion of the flight 8 vibrations (on a similar scale to above) when the Z-84 was not porpoising.
and here they are close up
Sir,
Thats very good for great improvement in vibration, as I understand that you have used two thinks to solve vibration problem, one is fit FC below carbon fiber rod which creat pressure on FC . Second is you have added lead weight on FC may be to reduce damping effect of vibration etc.
Sir, if you have possible than can you please take a flight test with following conditions.
- Apply foam pad at four corner as suggested by Mr. Tridge sir.
- Fit FC below carbon fiber rod same as you have fitted.
- Dont use lead.
We would like to see the results without lead weight. So we can understand propor concept of lead weight with FC.
That’s not quite right. See the photos above. The FC still fits under the carbon rod without touching so it is free to move. The foam pads and lead weight helps to keep the FC from vibrating. I’m happy with the improvement in vibration so my testing is done in that area. I await Tridge’s suggestions for changing PTCH2SRV and RLL2SRV parameters since my pitch pulsing has not changed.
Sir,
Heartily thanks for your reply in your valuable time, sir if carbon fiber rod not touching to FC than no need any testing because results are very clear that 100% vibration are greatly improved by only foam pad and lead weight . . . . Great contribution Mr. Tridge Sir . . . .
Thanks
Hi Greg
I like the look of the flat bar. Also a novel way to do the screw mounts.
I’d recommend using a Maytech 1306 with 5"x3 props for quadmotors on a sub 800g airframe. Should hover with around 10A.
Another way to reduce FC vibrations that I’ve used before is to use a peice of ply that is attached to the foam with foam tape or rubber bushes, where both the FC and battery can sit on. The battery mass will dampen the vibrations considerably. In larger airframes I also place the camera on there to avoid jello too.
1 Like
In the image below, you can see the oscillation in CTUN_Pitch as I fly into the wind around my circuit. Once this is dampened out, my Wing Z-84 will fly fine. There is no oscillation in CTUN_Roll.

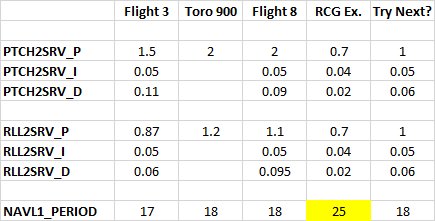
Below, I have compiled some PID settings from various sources. The Wiki has several good pages on tuning that I have linked at the bottom of this post. My Flight 3 PIDs were either defaults or close to them. I then saw the Toro900 PIDS in the Common Airframe examples which led to my Flight 8 PIDs before running AUTOTUNE. I suspect that I did not have a completed AUTOTUNE flight due to struggling with control in the wind but it was starting to lower the values. I then saw an older post on RCG that suggested it was flying fine using the posted PIDs. Granted, it was an older version of Plane. Ruling out the odd NAVL1_PERIOD setting of 25, I have decided to try some PTCH2SRV PIDs that match my working RLL2SRV PIDs and fit the goal of reducing PTCH2SRV_P. It should be an interesting test…
Tuning QuickStart
Automatic Tuning with AUTOTUNE
Roll, Pitch and Yaw Controller Tuning
Configuration Values for Common Airframes
NAVL1_PERIOD
Hi Jeff,
Thanks for the suggestions!
My test flight 9 today with the new PIDs worked very well! You can see the improvement in CTUN_Pitch below from my previous flight 8 post. I flew for about 7 minutes and then tried AUTOTUNE for 5 minutes but didn’t see any real improvement. Logs and config files are below.

WingZ84_ParamsFlight9.param (16.2 KB)
Flight 9 Log - 71meg
1 Like