I was in the trouble of high vibration in Z axis of hex. The situation is now under controlled by adding some damping mechanism. However I have a question that relating to the cause of vibration.
My hardware:
Hex plus 1200
Tmotor P80 motor and Alpha ESC
Folding props
Cube orange
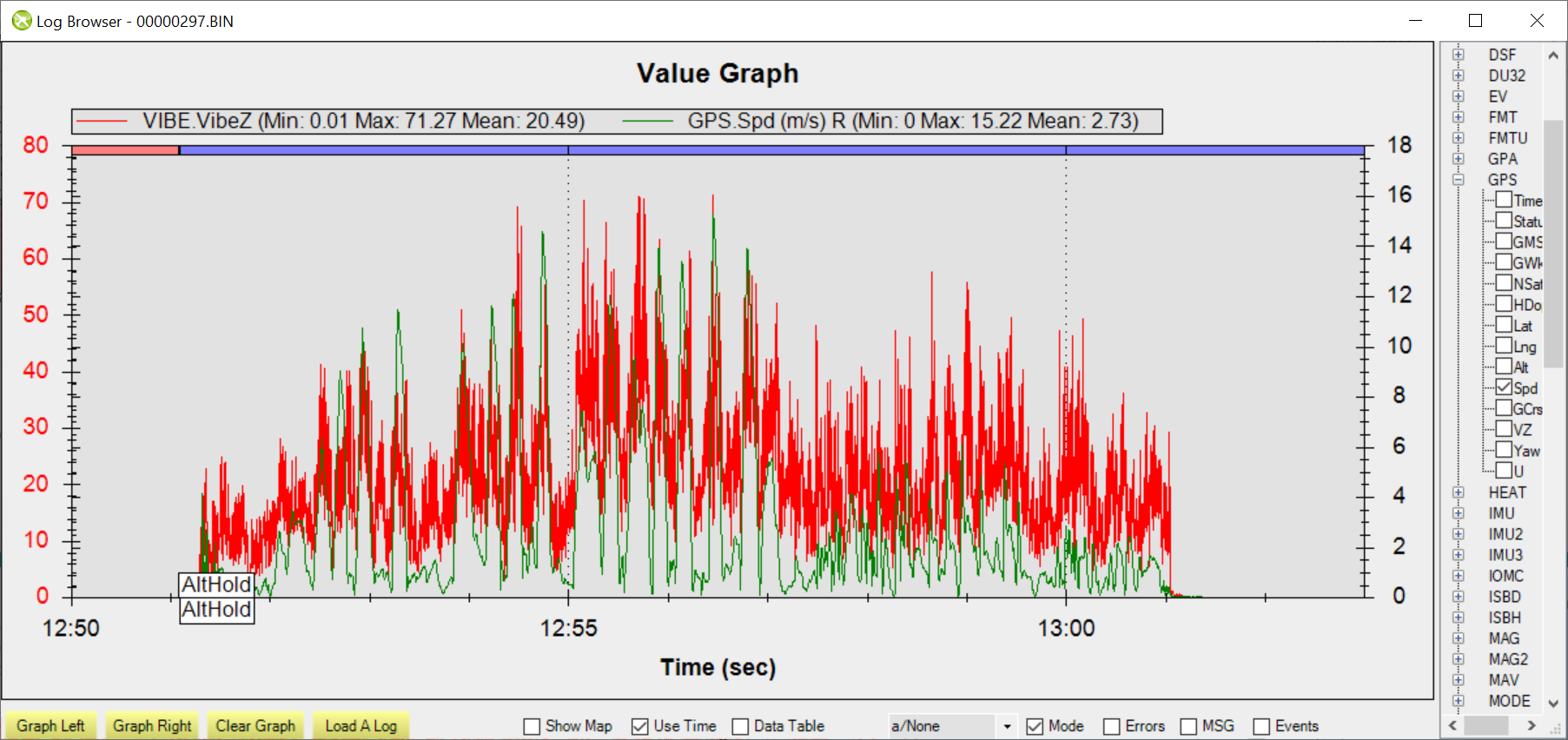
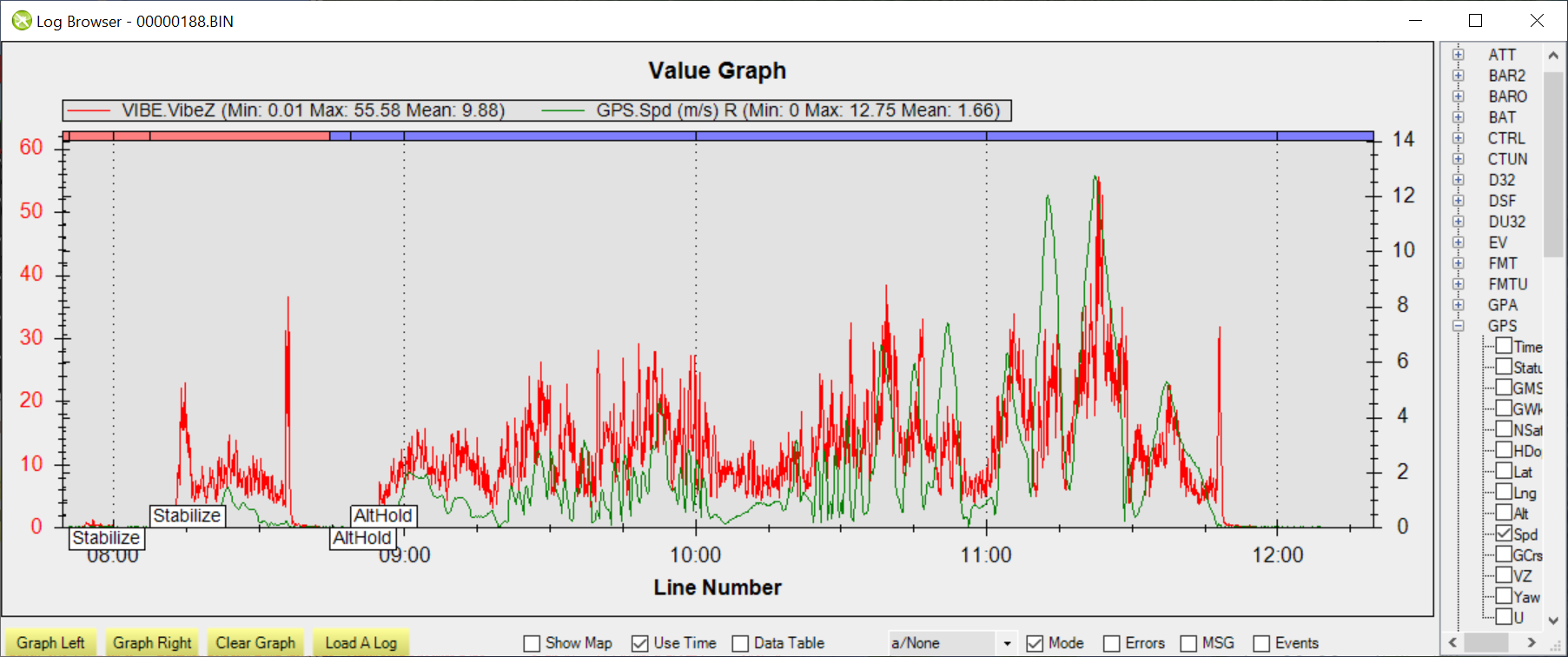
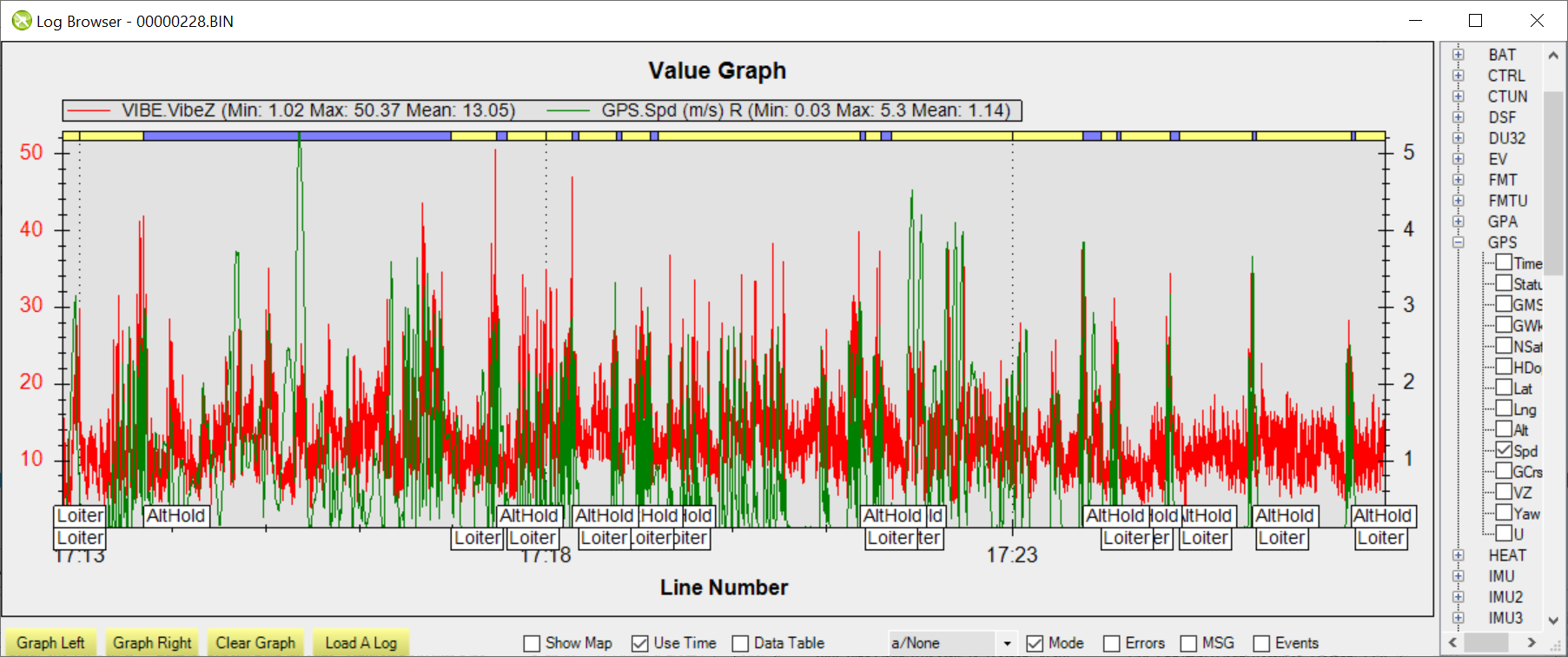
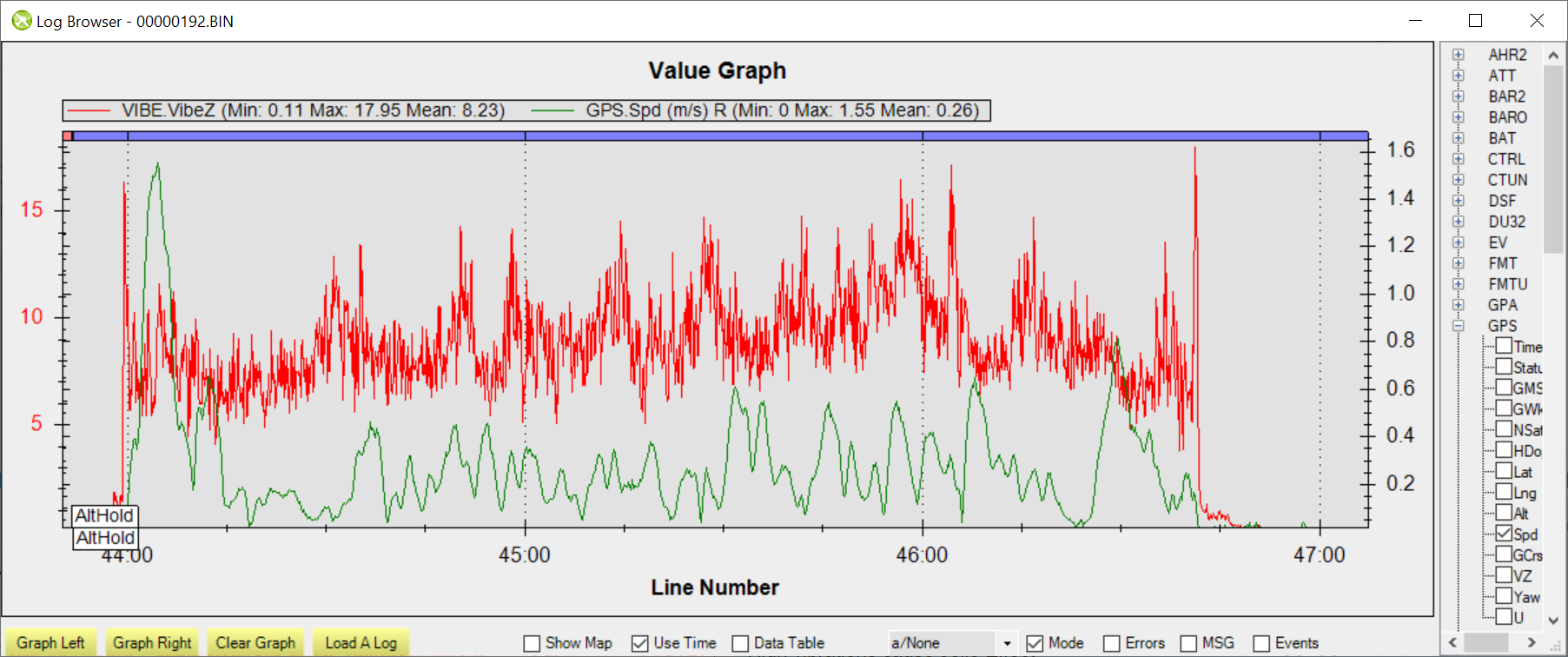
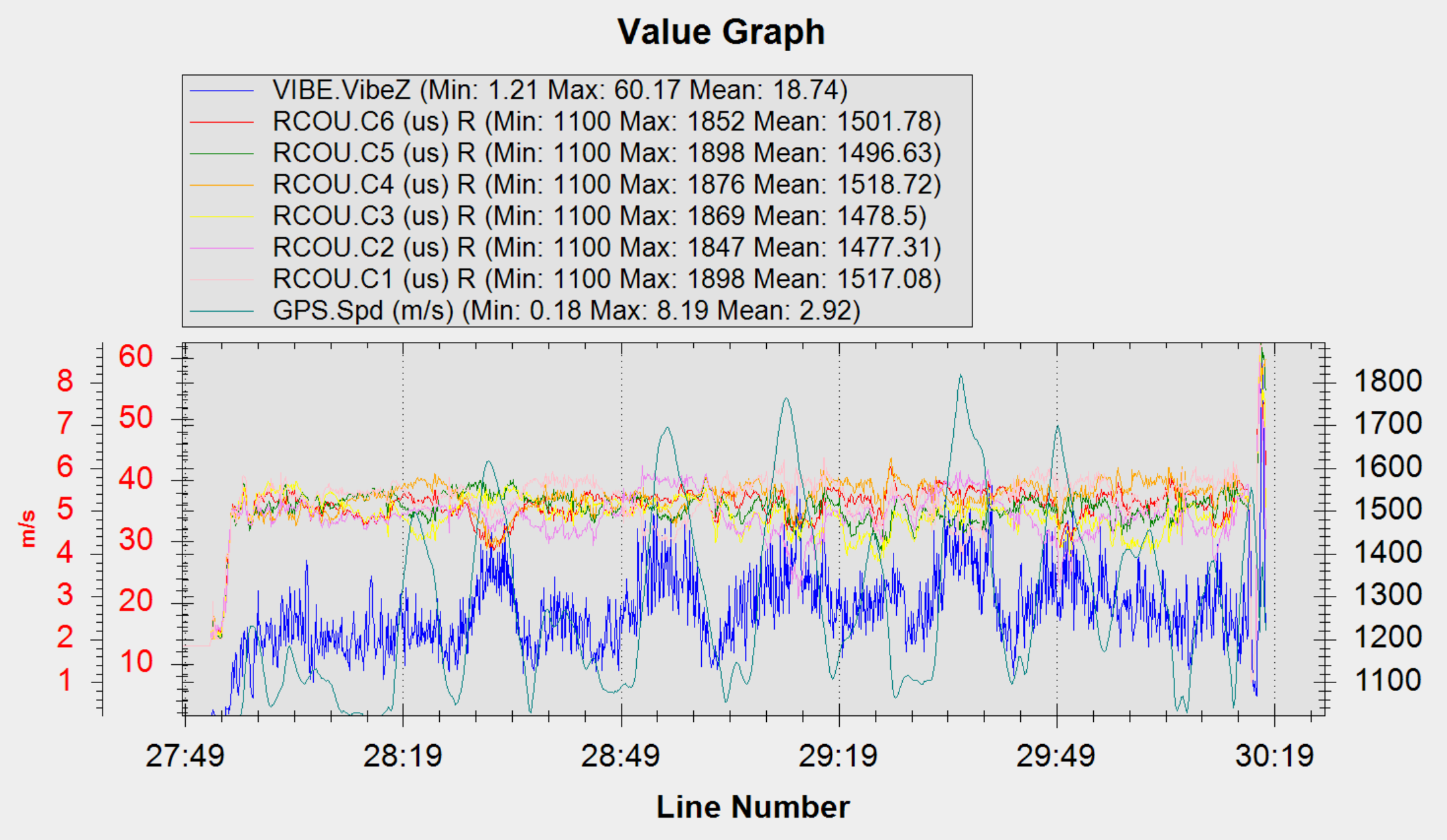
I do some naked-eye correlating about the Z vibration and drone’s speed and observe that when the drone speeds up, the vibe goes so high. It comes to less vibrating when the drone hovers or moving at low speed. There are some example:
In general with most of my aircraft I have noticed increased vibes during high speed flight (mainly turbulent drag) - but not as intense as you have shown.
Thanks. This issue is for may HEX+ size of 190cm. I have not faced something like this with smaller QUAD.
If it is my bad tune, I will be so glad but it is more complicated to “debug” if the reason comes from something else!
There is definitely some PID improvement that could be done - but I don’t think it would fix your vibes issue. Can you send a picture of the aircraft - and the autopilot setup.
Usually this is not recommended - so I wonder if hard mounting would be better. It could be worse though with hard mounting, but there is really no way to tell.
Yes, we have tried a lot of damping mechanisms from soft to hard with many type and the lasted design used with damper ball (as thing used for gimbal) seems to be the best solution. It is validated based on log file and fft.
Hard mounting provides terrible vibe and noise impacting on the controller.
Hmmm - I don’t have much else to say. Sometimes z vibrations are unavoidable with larger aircraft. The values in the log aren’t super dangerous per say - but it would be nice to eliminate them. Maybe some PID tuning will slightly help - so I would start there.
Actually the copter did fly well in AltHold and Stabilize mode. I always think that the high Vibe affected Loiter mode too much. In Loiter mode, it does not perform well in wind resistance (4m/s wind speed).
And yes, I will retune it soon.
I worked on a large X8 that had a similar Z-vibe issue. The problem was the carrier board. No matter how that was mounted to the main frame it caused higher than desired Z-vibes. Soft stand-offs, balls, Zeal were all tried with little improvement. Eliminating the carrier board and mounting the FC directly to the frame lowered them significantly. That may not be practical for you just an example.
I don’t think you need the 4th harmonic on the Notch Filter. I would set that back to 3 max (7).
Also, the INS_ACCEL_FILTER is probably too low at 10Hz. This can adversely effect dynamic stability. Try 15-18Hz.
Thanks for your sharing and advice,
Regarding the carrier board, do you mean we have to use the original version of Cube’s carrier?
I am still confusing about the relation between high speed and vibes: are they casual or relative?
The reason for low INS_ACCEL_FILTER is was testing how much it can eliminate the noise in RATE.R, RATE.P… but too low is not so good as you said. Thanks for reminding me.
On the X8 there was a separate board mounted above the top frame plate that served some PDB functions. This craft had a Cube Black, a Cube Orange and finally a CUAV Nora mounted on that board all with the same higher than desired Z vibes. Attempts at isolation of this board failed to improve the situation. After removing that board it was clear that the board itself was too compliant and the root cause of the problem.
But this may not be a practical solution for you. It required a complete re-wire on the X8.
I would say relative. I have a ~550 frame with the same issue. In that case the frame is just not rigid enough. But, it flies OK and I have just accepted it.
Hi , I am a research intern working on trajectory optimization of laser powered drones and for modeling the problem I need to find the relation between drone velocity and drone vibration (Swaying) .Actually I didn’t find a paper or a reference that mentioned this relation . My question is do you have a data set of drone velocity and vibration . I need this data so maybe I could find a relation using machine learning model . Thanks in advance