Hi ! First post here !
Explanation
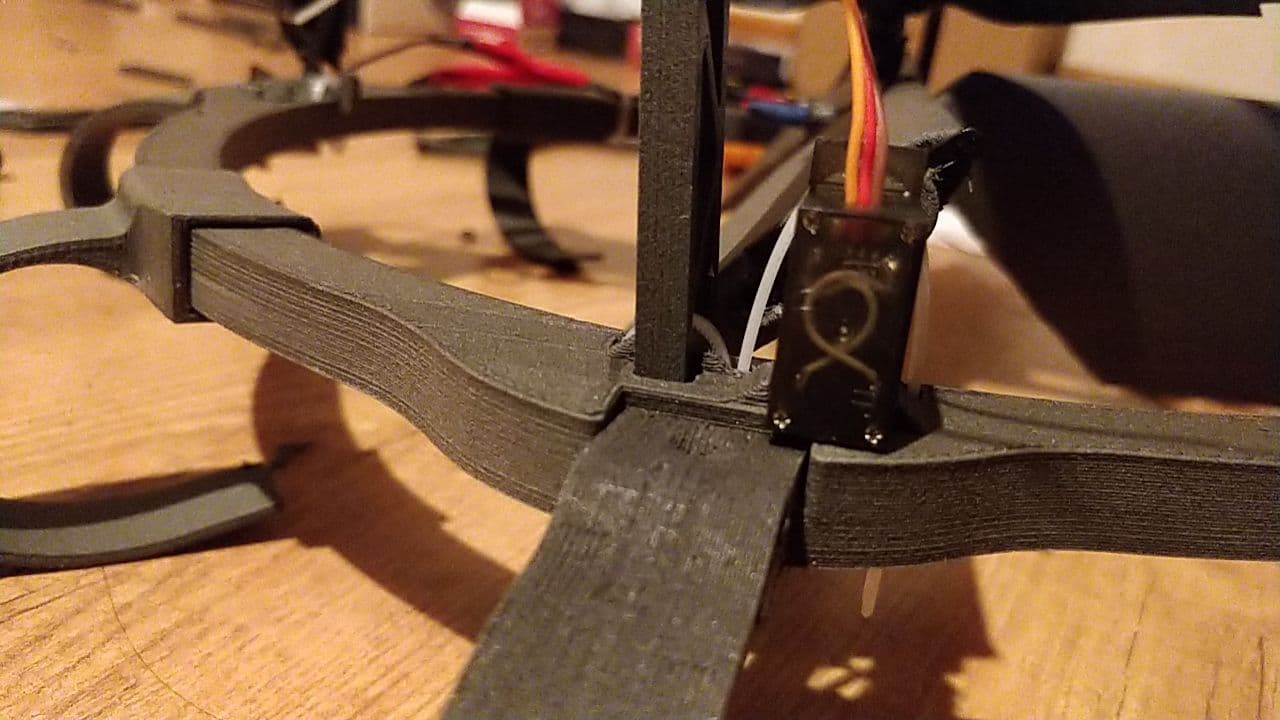
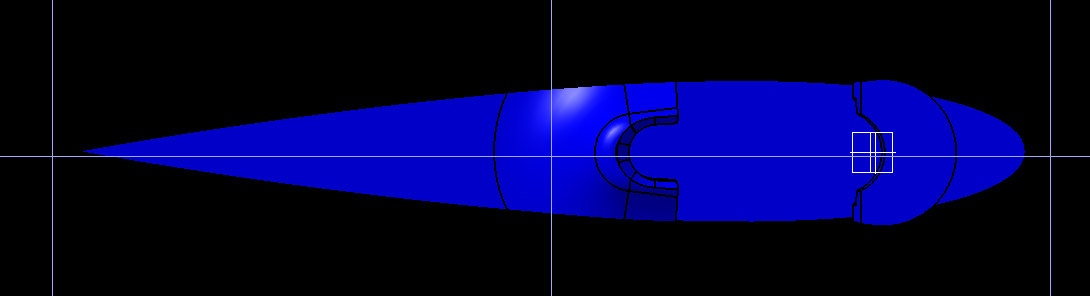
I’ve built a single-copter and I managed to manually tune it in stabilize mode. It’s very stable and safe in stabilize mode, no problem here.
BUT, when switching to AltHold the controls are off. This led to a first (very bad) crash, a few seconds after AltHold, I pitched-rolled a bit and the copter began a spiral fall. The yaw (that I had not touched) seemed crazy and the copter unable to stabilize because of it.
After a week of rebuilding and further testing today, I re-enabled AltHold after many succesful Stabilize flights. After a few seconds in AltHold, I Pitch and Roll to correct for the drifting, but then, the copter ALSO changed its yaw by 150°. This time no crash (maybe because I tuned down the Roll/Pitch PID after the first crash), after noticing the unwanted Yaw/Roll behavior I let it drift, not touching Roll/Pitch stick, while praying that it will avoid the trees before landing.
Log Analysis
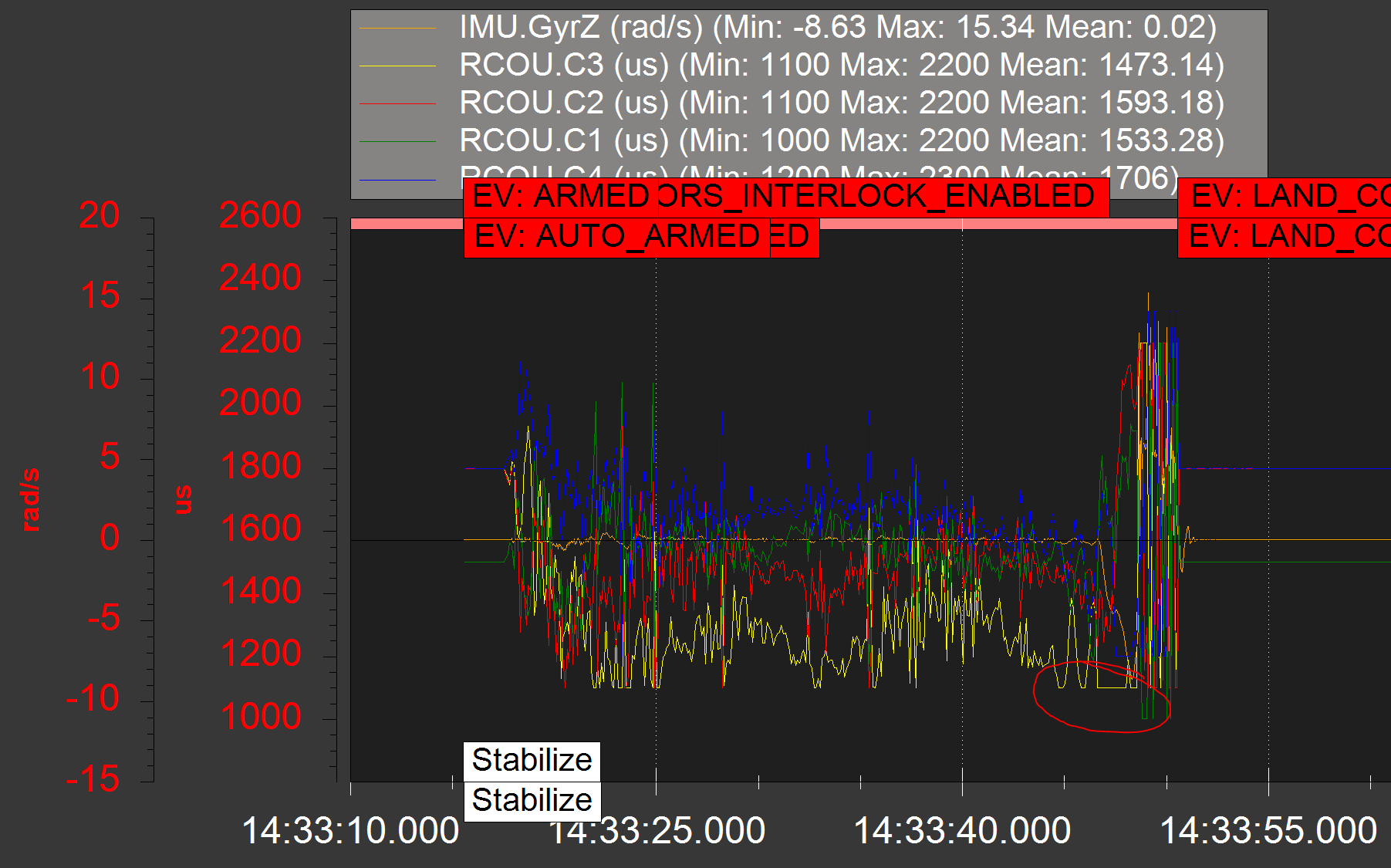
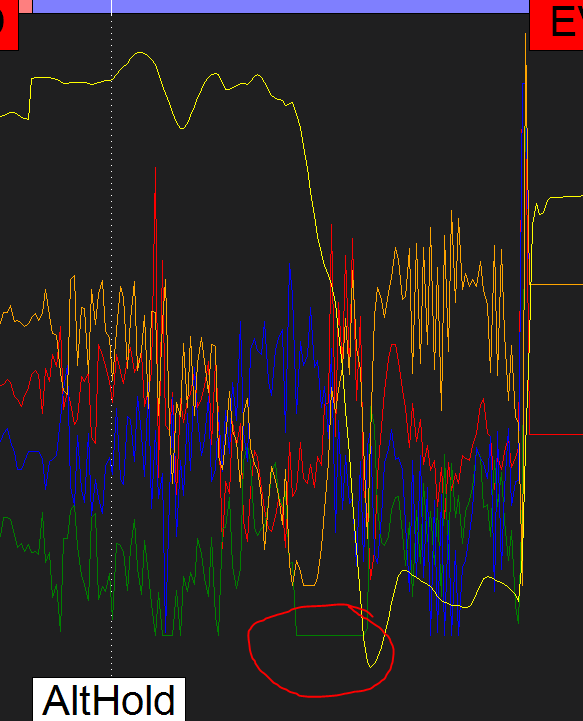
I analysed the logs (the first, from the crash was pretty useless : too short) but couldn’t find anything :
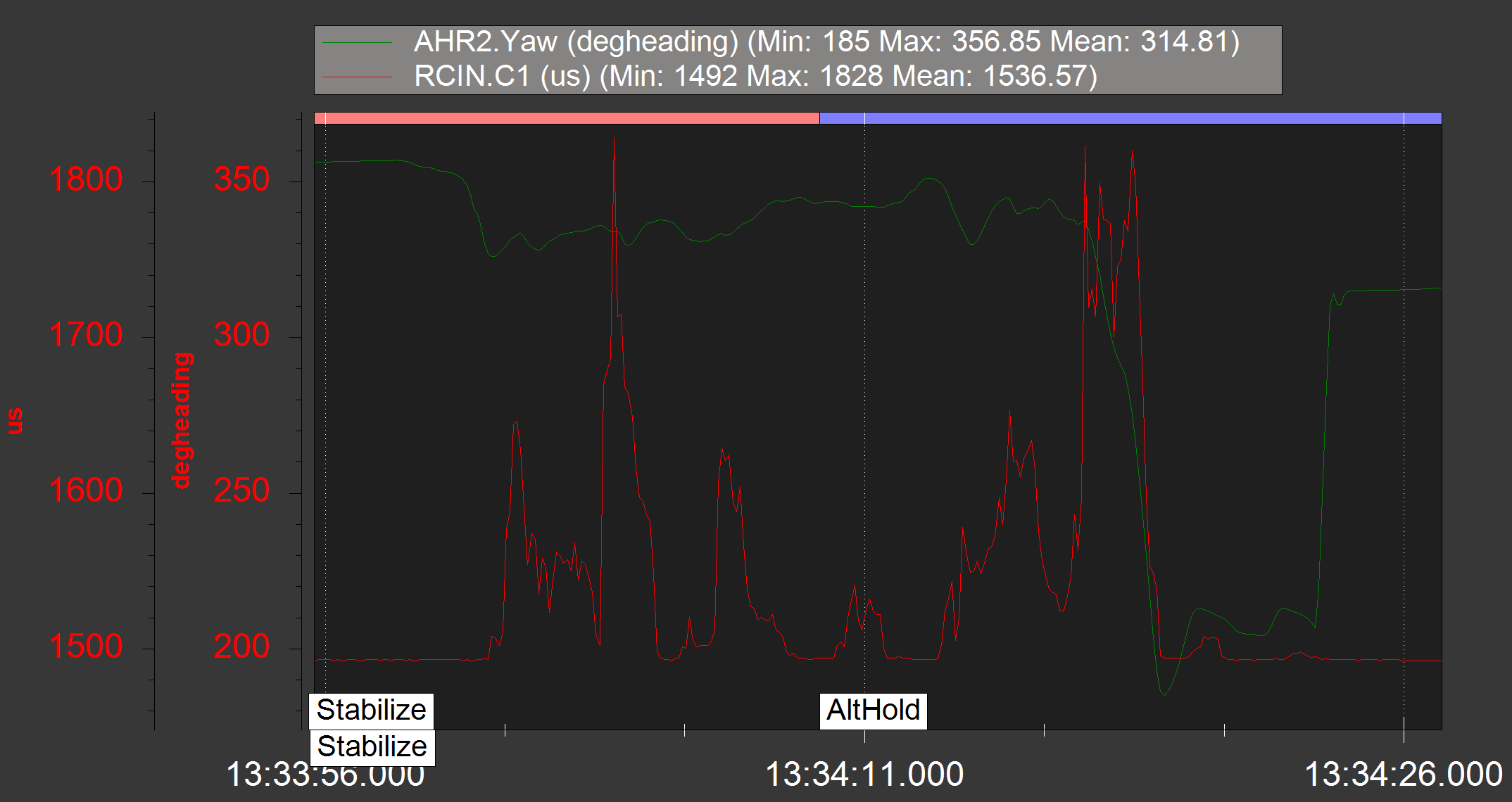
- The change in yaw was well detected by ardupilot : not a compass/gyro error. Though I’ve no video to verify the rotation because the copter is outside the frame.
- CH4 (Yaw) was on the neutral position the whole time : not a radio problem
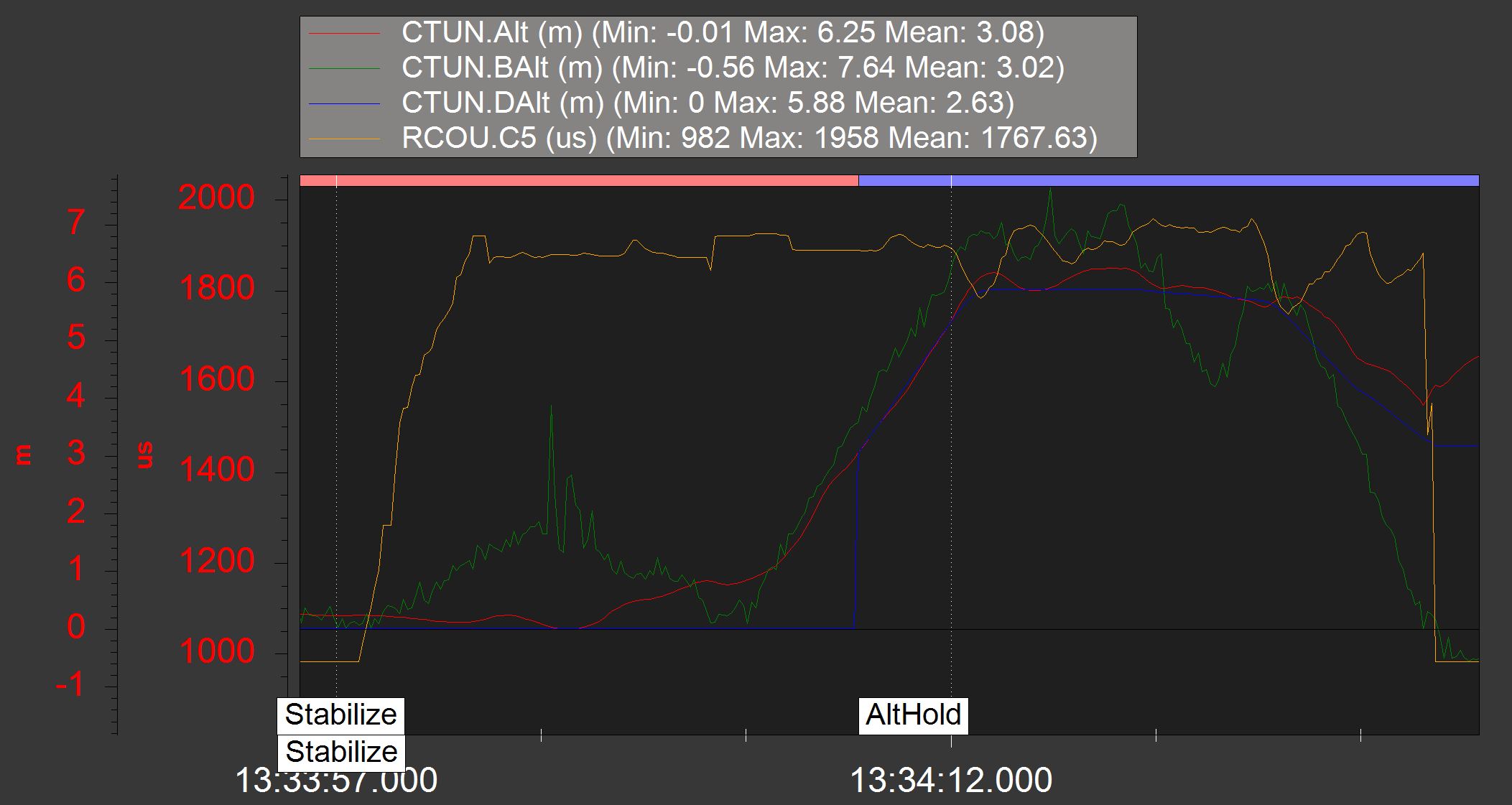
- Altitude control seems fine and follows my (few) inputs : not an Altitude controll algorithm problem.
- The throttle (C.OUT5) was stable : the yaw is not due to the single propeller gaining momentum
- The 150° roll occured during an input on CH1 (Pitch) : Pitch linked to Yaw ?
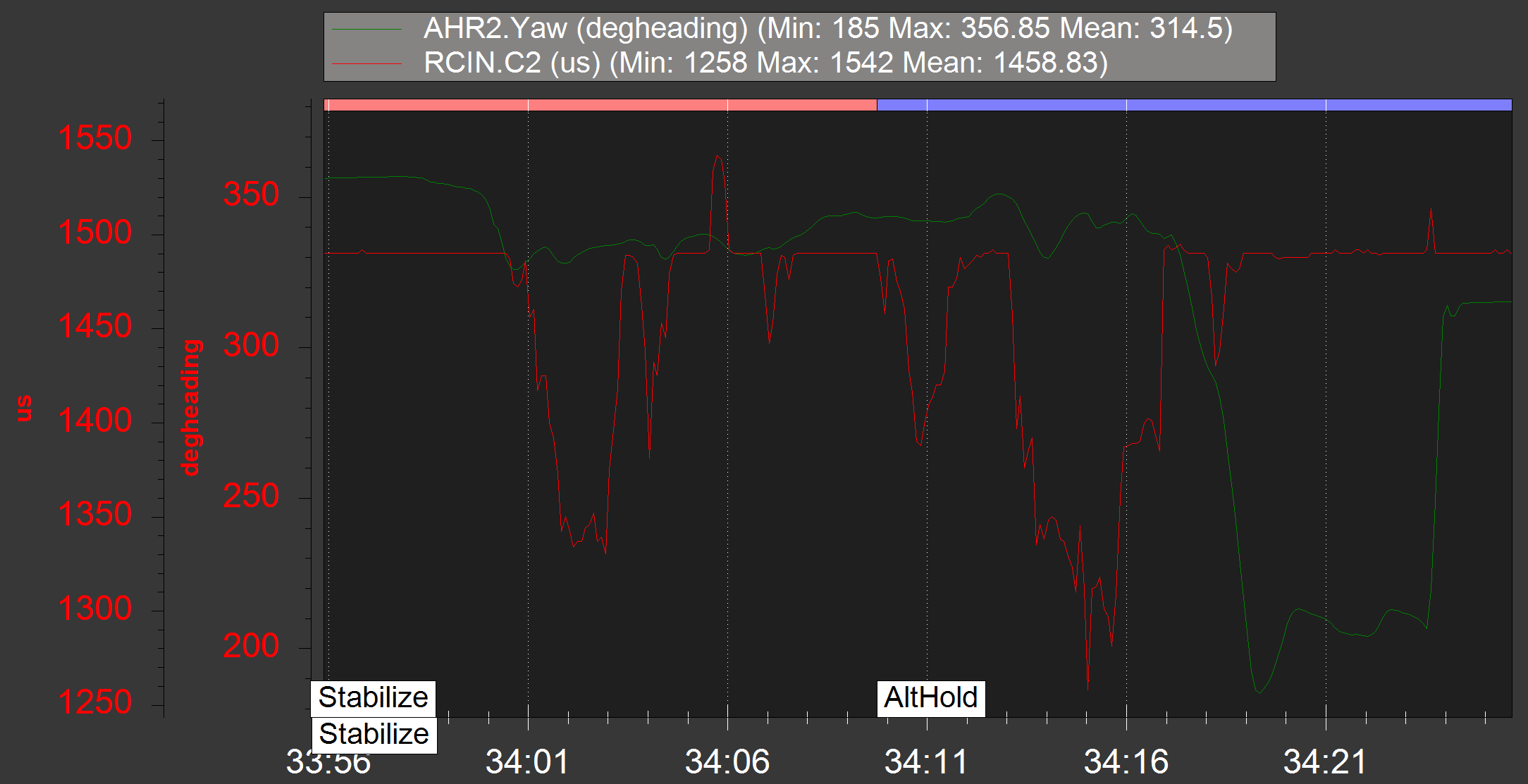
- An input was made on CH2 (Roll) just before, but that doesn’t seem to have impacted the Yaw : Maybe not the Roll linked to Yaw
- After the Yaw change, the copter didn’t rotate a second time because I (tried to) not input anything other than CH3 (Throttle) : not an Altitude controll algorithm problem.
I Don’t Know what’s happening
I though that maybe the copter wants to face a waypoint (home) when changing flight mod, so it rotates a few second after I pull the switch for AltHold, and I could have controled it by inputing Roll/Pitch. But this seems very unlikely.
I simply can’t pinpoint where this is comming from and I don’t want to risk another crash without changing anything.
Last log : Should I send a log with my GPS data in it ? (yes, I’m new here)
First crash log : idem