any idea what all parameters to define while trying to fly a VTOL Tilt rotor with the front 2 motors tilting.
We have given frame class as Tailsitter and h frame type. Our Q_Tilt_Mak = 3.
Also we cannot seem to get servo output even though we have connected right tilt servo to pixhawk main channel 5 and given Servo5_Function = 76 , and left tilt servo to pixhawk main channel 6 and servo6_Function = 75.
2 Likes
Hi Jim,
Tiltrotor VTOL and TAILSITTER are two completely different VTOL aircraft. You can not “mix” them (which would be nice).
a two motor tilt rotor is not possible on master, but I do have a open PR if you fancy testing
Hey Rolf, I just meant that we tried to go from a base file of a tailsitter and modify the parameters such that it could be applicable for a tilt rotor VTOL.
Thanks for the pull, Peter. However, I am a bit of an amateur when it comes to understanding the firmware. So what do I do with these .cpp and .h files in the pull and how do I implement it? Do I just download them and replace them in the source folder, and then set Q_Frame_Class = 10 and Q_Tilt_Type = 3 in the MIssion Planner?
yeah you would clone my branch and compile the code from that, I can compile you a cube build this evening.
I have done a cube black build, note that this is rebased on master. It is thefore not a stable release (let alone my tiltrotor stuff that has only been tested in the SIM) it could do unexpected stuff.
Hey Peter!
Thanks for the advice and code regarding this tilt-rotor. I will try implementing your code in my PixHawk and will update on its progress.
Hey Peter! So we tried uploading your firmware to the Pixhawk cube and we ran into a couple of issues during testing:
- in manual mode the compass is level and straight, however when we switch to QStabilize and QHover modes we get the orientation of a tailsitter in the compass.
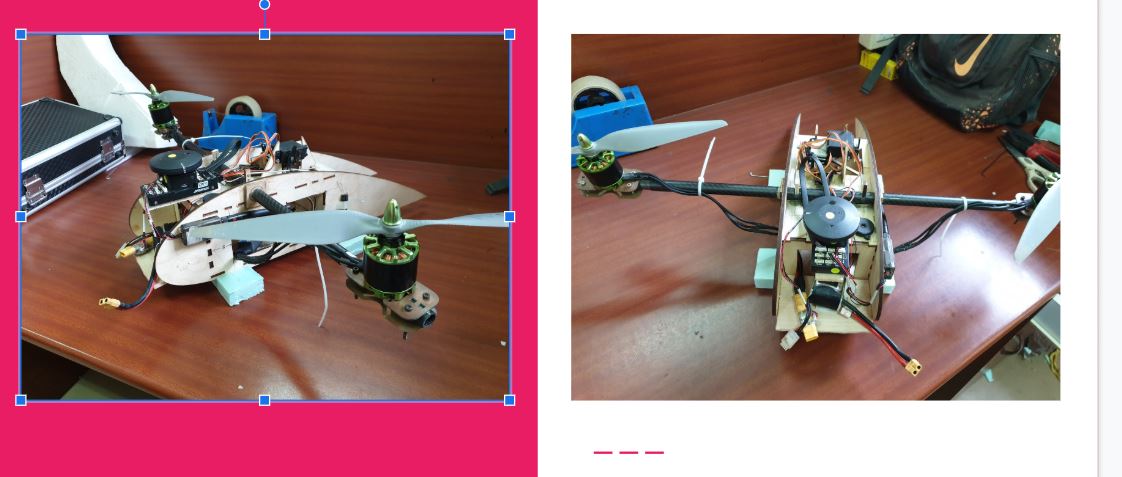
- As you can see from the picture of our Tilt-Rotor, we don’t have any ailerons, elevators or rudder. The 2 tilt servos have to control our pitch and thrust vectored yaw, while aileron is controlled by thrust difference between the 2 motors. On uploading your firmware we don’t get this type of control from our transmitter. Our servo outputs of the 4 main channels don’t have any outputs on the tilt servos that we require.
you need to set Q_FRAME_CLASS = 10 and Q_TILT_TYPE = 3, the motors and tilts should be set to throttle and tilt left and right
Hey Peter! We carried out some tests and this was our setup:
- servo1 output = throttleRight, servo2 output = throttleLeft, servo3 output = tiltMotorRight, servo 4 output = tiltMotorLeft
- Our radio (Hitec Aurora 9) was setup like this:
https://drive.google.com/open?id=1QaQhhXx-lV5UDGecpwRgJkmAPFrFvexo
We noted the following observations:
- The throttle control and aileron control of difference in speed of motors was working properly.
- We had an inital problem of gyro being straight in MANUAL mode, but in QSTABILIZE and QHOVER it took on a tailsitter gyro orientation. So we changed our AHRS orientation to pitch270 and that fixed it for the QSTABILIZE and QHOVER modes.
- We are using a SBUS connection to our reciever, and our tilt servo movements are very erratic and random.
are you seeing a change in the HUD between Q modes and forward flight? if working correctly there should be no reference frame change.
Yes we got a HUD change between manual and QSTABILIZE AND QHOVER modes for some reason
Q_TILT_TYPE = 3? and Q_FRAME_CLASS = 10?
if these are correct, I’m not sure whats going on, it works in SITL.
edit: as ever a log would be useful
Thanks a lot for the help Peter! I’ll try recording a log and posting that over here tomorrow!
1 Like
Hey Peter! So we just reloaded the firmware and for some reason the HUD change error is fixed!
The firmware seems to be working good, except maybe in our case its a bit slow to respond to gyro changes for some reason.
We tried a flight test yesterday and we got the following results:
- As soon as we increase thrust past 50% a yawing moment is created and the plane continuously yaws.
- Around 70% throttle, the bi-copter lifts off the ground but a great pitch-down moment occurs on the fuselage and as a result the bi-copter flips almost 90 degrees and the props hit the ground.
I will post the test video when I get it from my team tomorrow.
I would expect this to be a massive PITA to tune in the hover. It may help to lower the CG as much as possible, this will give you better pitch control, once you have it flying OK you can always gradually raise it and re-tune.
A vid will show if it is at least doing the right thing. ie is it the tune or the setup
Here is the bin file from the flight test https://drive.google.com/open?id=1vbzibdctLEa9tydgskkdBlT7XqK3RbJ5
We also have this issue where when we try to takeoff in QSTABILIZE mode the pwm output for one motor is higher than the other even though we have the same RC channel for both
This thread might be dead, but as per request from @iampete , I will tell how I configured a reverse engineered v-22 osprey replica as a UAV.
I used arduplane, but I forgot which version. Mind that the plane I built is two years of age, and I am not allowed to share its pictures.
Q_tilt_type and q_frame_class is configured as said above. Motor 1 is right motor, and motor 2 is left motor. There seems to be an issue where the forward and backward tilt angle maximum value is not the same.
The plane succesfully took off in qloiter, but it suffers jittering issues. It seems that the mass of the tilting part is too large, hence the fuselage is also tilted when the rotor tilts.