Tried Q hover and Q stabilize with the same result. ESC’s are calibrated and motor direction/ props are correct. Violent oscillation the second I throttle up. Thoughts?
Description on vehicle type, oscillation in which axis?
Nano Skyhunter VTOL. Tri motor configuration with oscillation in the roll axis primarily but is hard to tell due to not being able to get off the ground. I have tried lowering the pid on roll and pitch to .1 with even worse oscillation. Using MP 1.3.70 and Arduplane V4.0.4 These are the low pids
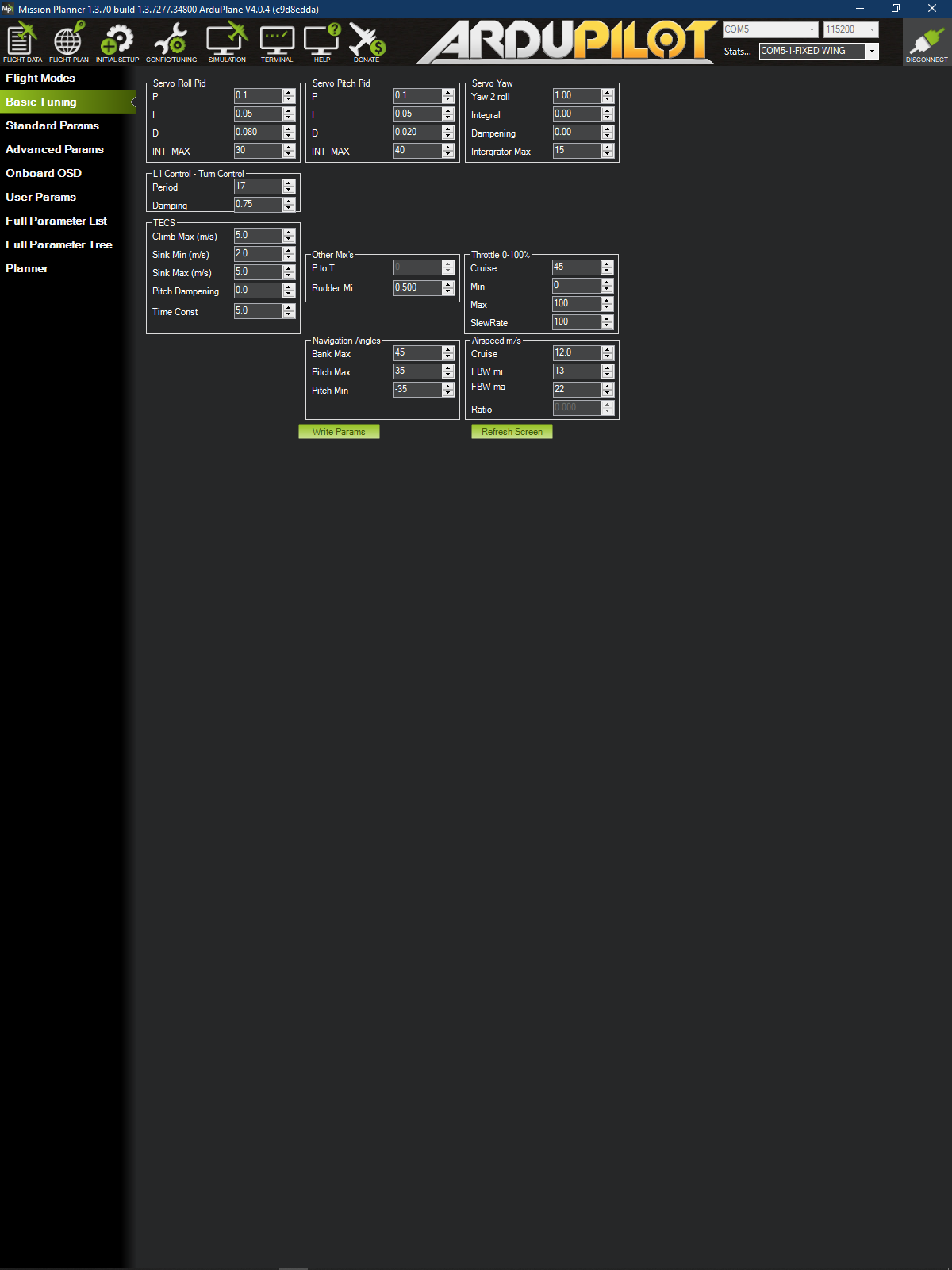
Where did the roll D gain of .08 come from? It’s probably way too high.
In the wiki. Also it won’t let me set anything below .1 if I set to anything below .1 when I save it reverts to .1. If I set over .1 it will save.
Which wiki page is that?
Can’t seem to find it now…regardless I can’t set lower than .1
Oh, those are the fixed-wing PID parameters, not the VTOL ones.
What are your values for Q_A_RAT_* ?
Those are the ones that affect VTOL modes. I guess MP doesn’t show any of those on the Basic Tuning page, but you can find them in the full parameter list.
Wow? Thank you for your help. I’ll look those up when I get home.
.3 for pitch and roll .6 for yaw p
.25 pit roll I
Ok, cut P and I in half and actually got off the ground!!! I’m getting yaw spin and don’t seem to have throttle response from arm to about 50% throttle…
Glad you’re making progress. If you hadn’t noticed it yet, this thread: Mini Talon QuadPlane Conversion (cont.)
probably has info you will find useful.
1 Like
Ok, through some motor order correction and pid tuning I managed to hover in Qhover for a few minuets. The only issue is that my pitch is reversed in copter mod but my surfaces seem to pass the high five test…Thoughts?