This thread is super useful!
We are planning a freeman build for mapping purposes, but we’re new to the drone/plance scene. I do electronics and firmware development professionally and my friend is a mechanical engineer, so I feel confident we can figure it out eventually.
One question I have is how well does this frame work with the official ardupilot builds? I am leaning towards the Matek flight controllers, which should be 100% compatible with arduplane. Should I expect any shortcomings or problem with that approach? I understand MFE develops a custom version of ardupilot for the pixhawk. I assume there is no port of that for the matek controller (?), but would their configuration files be useful to set us on the right path for setup?
Well, there is a Parameter list for Arduplane from MFE in here. It should work on a Matek FC as well as long it has Arduplane flashed on it.
I’m building a Freeman 2100 kit right now and plan to use a Matek H743 wing as FC, technical specs are comparable to actual Pixhawk (PH4 or newer) FCs and save a lots of weight and space.
That was my thinking as well. Lighter and cheaper, plus I prefer not having boxes so I can plan all mechanical mounting on my own.
Someone much earlier in the thread reported using the official Arduplane version (and not the MFE custom one) so it should be able to work with the right configuration.
Someone mentioned that the parameters exposed by the custom firmware are more than those normally available to users, which is why I wonder if you can load the file immediately or need to do some hand conversion between the two.
how the tail servo screw system works actually? mine has one screw hole, then the other side is “hollow” like there’s a missing piece or something. I could not find a mating component. No mention in the manual whatever…
Sorry about that. Nikola made a subtle change to the link. Try this. If it doesn’t work, go here and type “believer” in his search window. Also, there is a mirror of the review on RC Groups here. I prefer the RCG format to his blogspot format.
Guys, a thought came into my mind, during assembly of my freeman. Premise: i have fixed wing and multirotor experience, but this one is my first “both of the two worlds” VTOL.
From my multirotor experience, in case of a symmetric (square motor to motor) quadcopter, COG has to be right in the geometric center of the frame, so motor loads are perfectly balanced and RCOUTS to motors are (mean) the same on every motor.
Now, i’m doing the motor arms and supports on this VTOL, and at first, i would place them at their stock, simmetric position (length wise, modifiable by changing tubes lenght). However, COG is not at wing center, but forward to it: this alone would lead me to shorten backwards tubes to put COG in the middle of motor-to-motor distance.
However, In addition to that, we are putting different kv motors and different propellers on front motors (way more pitch), making them less powerful in terms of thrust.
All this lead to me to make backward arms shorter and front ones longer: so COG is more on the backwards ones, compensating having less thrust on front ones. This way, load will be more balanced.
What’s your thought about that? Sorry if this topic is old or silly, maybe it was ticked at beginning of VTOL era, but i didn’t know about it.
I’m not sure what you are getting at. The tube lengths should be pre-cut. The Believer CofG is 15mm behind the center of the front spar and the Freeman has it in the same spot. The plane and VTOL versions use the same balance spot. It is marked with a bump on the bottom plastic wing end. The CG is measured with the front motors facing forward.
The changes in the front motor Kv and props are for more efficient flying. Remember that the VTOL will mostly be flying forward with short periods of hover. The hover efficiency is reduced to improve the flight efficiency. A typical VTOL trade-off.
the point i’m trying to speak about is the inhtrinsic assimetry of the plane’s quad part. Due to this, arm length should be made different (to my quick and dirty calculation, rear arms should be shorter than front ones).
Maybe i’m wrong but i would like to get some advice on that.
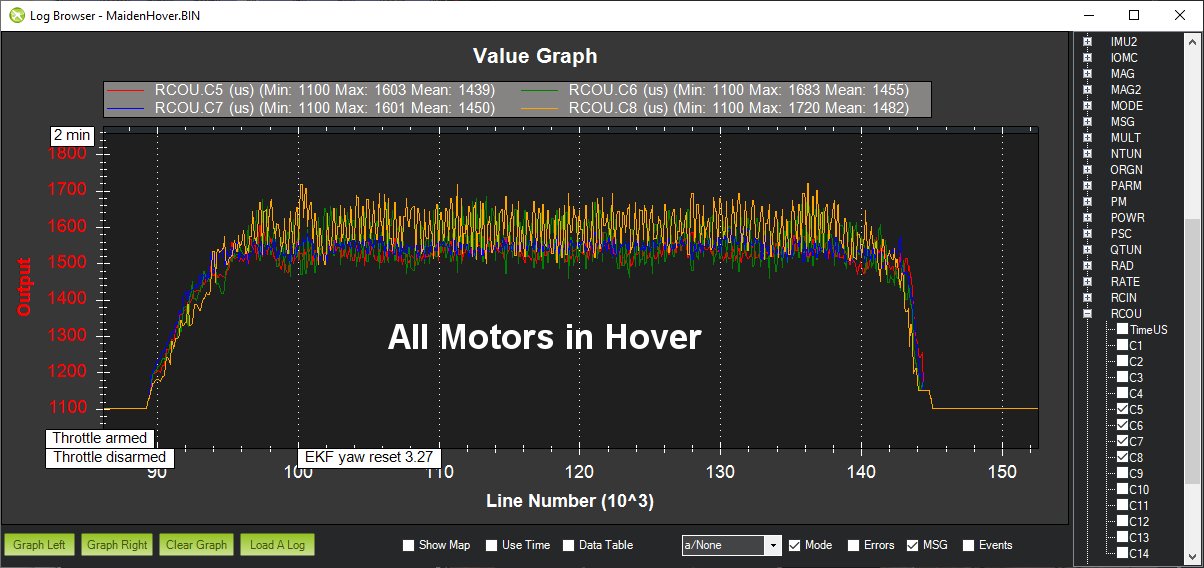
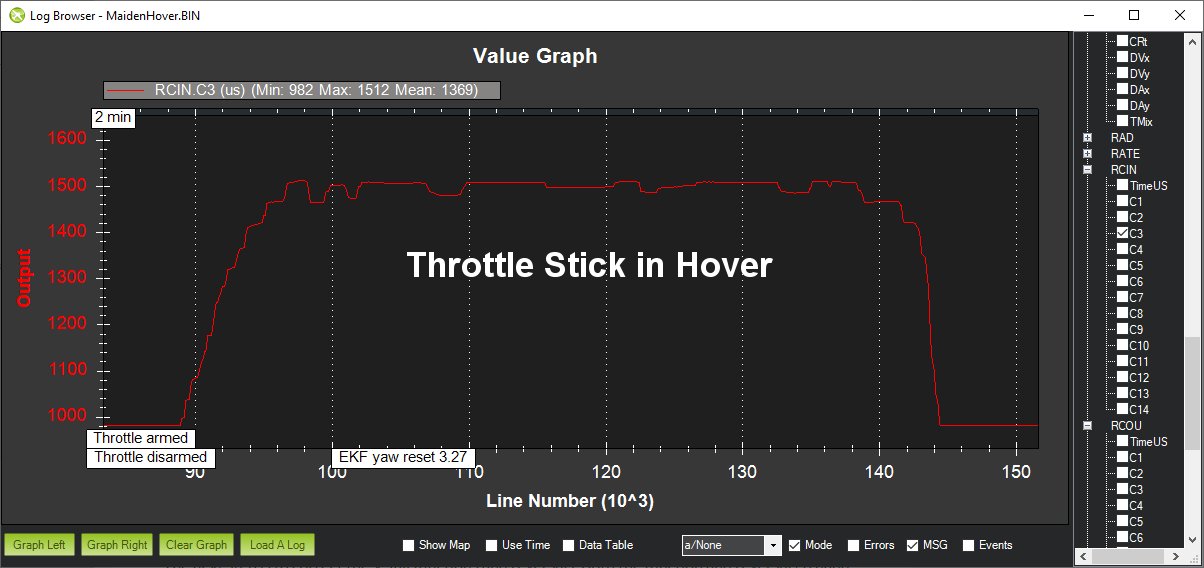
PS a counter-proof of that would be easily readable from a hovering flight log, looking at RCOUTs values, in a symmetrical and assimmetrical-corrected setup and checking wherever they are equal
The plane design is fine when using the recommended motors and props. The variations in the motor Kv and prop size, along with flight controller compensation, provide a reasonable equality from front to back.
This graph has been posted above before. It shows the motor outputs in a hover test. The noise came from my 5v CCBEC regulator plugged into the servo rail. I have since fixed it with a 3300uF cap plugged into a spare channel on the Pixhawk.
also, when i connect to the pixhawk, it does not load params, at least it does not seem to do that. Do this part has become so fast or put in background maybe? With copters, loading params take a quite, always.
Hi Greg been off the flying for a while. I wasn’t happy with the Tilt rotor and the unapproved firmware so I added a forward motor with a 73mm round ply mount much like the fighter except 6s smaller and it has a ton of power, here’s a quick. Vid
Well, here we are, i maidened my freeman 2300, arduplane 4.0.9 beta1 and param file from MFE, adjusted a little bit by me (servo output endpoints/trims, some other small tweaks). My setup has front tilting motors
quadplane: i took off in QSTABILIZED and had successful flight. Plane is well controllable, power is there, maybe PIDs can be tweaked but they work.
FBWA: here’s the problem: when transitioning from QSTABILIZE to FBWA, plane wants to yaw at full rate, doing a slow spin rather than pointing forward. Yaw command (done by front tilted motors) is done by attitude controller, so it’s not a saturation of a low yaw PID setting, as you can see in the logs. Despite this, i managed to do a successful transition to forward flying once, after taking speed it worked ok, then switched to manual (not visible in the log linked). Other trials failed, i could only revert back in QSTAB and land
manual: here plane is doing well, it’s basically a matter of right CG, throws, power… I managed to fly some circles, then back to QSTABILIZE (which transitioned very well) and landed ok.
So, my challenge is to fix that yaw sping during Q->FBWA. Maybe it’s Q_ASSIST_SPEED param to zero (now is 14)? other advice acepted.
edit: i found a Q_A_ANG_YAW_P set at 65 buried in my params… maybe a typo from 6.5… maybe we have the culprit
This is a known issue when using the standard Arduplane firmware instead of the custom MFE firmware. However, there are several fixes here. You can also try what Steve Young did to resolve the issue.
P.S. Next time, post your .bin file, not the .log file please.