Hey @rollys
I like that VTOL it looks pretty nice. The price is also nice considering this would be a first build. I don’t understand what the difference is between 4in1 and the tilt rotor plane. Do you know what it is.
Will read it some more.
Edit
Awe I get it …one is fixed motor with a pusher motor the other is tilt rotor. I lean towards the pusher motor and fixe motor position…Less things to go wrong.
Ok, I will install it in place or remove it from params (the lidar).
But what is the problem with the qloiter? What I’ve done wrong?
What is so special in mfe fw which is modified or missing in the standard ardu fw? I come from the it sector and I try to remove any 3rd party apps that can be variables in the scheme. Also I like to use the latest fw as that resolves some of our problems with our hw.
I don’t know but I would get QSTABILIZE and QHOVER modes working first with no AS Sensor and no LIDAR.
This has been covered in posts 310, 311, 325-330, and 341above. There are probably others. MFE exposes new parameters to the user that improves performance on the Freeman.
Hi all,
I read all your posts and wanted to thank you for your time and effort to share your experiences.
I’m looking to buy the Freeman 2300 VTOL, PNP version. AliExpress is charging close to $100 for tax (I’m in NY). Did that happen to you? The money goes straight to china, do they actually pay back that “tax” to authorities in the States? I tried an address in Georgia but they still charge the same amount.
My question is, what other sources are available to buy a PNP version?
Thanks
Welcome to the MFE Freeman thread. If you live in NY, I don’t think the Freeman 2300 PNP version is available. I only see the kit version and the shipping cost is a ridiculous $1018 or more. Let us know if you see different.
I suspect the high shipping is only temporary and it will go back down to what it was before.
Hi Greg,
Thank you.
Wow, I just checked the link and yes the PNP is not available anymore and the shipping cost is $1018 lol. I will wait.
Thanks again.
Your post is helping me to initializing with 2100, congratulations.
I have a trouble to try a transition, is possible make it doing without specific firmware ? I am not using Firmware of MFE, I think Arduplane quadplane code could to do this perfectly, but not ! I was using in my Nimbus VTOL tricopter, no problem !
I’m having problems in the transition to fixed wing, as soon as it make the transition, the plane does not follow a straight line (auto mode), making turns to the sides, as you can see in the video below:
That’s odd. The Pixhawk 1 is essentially the same build as the Orange Cube. Only the really old Pixhawks with the 1MB flash memory issue have a different build to omit some features. You can try loading it with another app like QGC or even BetaFlight works great.
This is one of the issues seen when not using the MFE custom firmware. While you can certainly continue using the standard APM firmware and tune things yourself, I might suggest that you first try the MFE custom firmware so that you have a baseline of proper operation. From that point, you can then leave it as is or load the latest APM Plane firmware and start tuning. I would also recommend using FBWA mode instead of AUTO for your initial transitions.
Most of us on this thread are very happy with the custom MFE firmware. I never went back to test the standard APM Plane firmware but it seems like something is wrong in the yaw control settings. If my memory is correct, the plane would eventually stop yawing and start flying.
Good luck!
Edit: I didn’t see Paul’s post below but this could be the issue. Remember that your initial forward flights should be with the AS sensor disabled. You then calibrate the sensor (or leave it in calibrate mode for the first few flights), check the logs for proper AS operation, and then enable the sensor. In other words, you can calibrate the sensor without using it. Calibrating an Airspeed Sensor
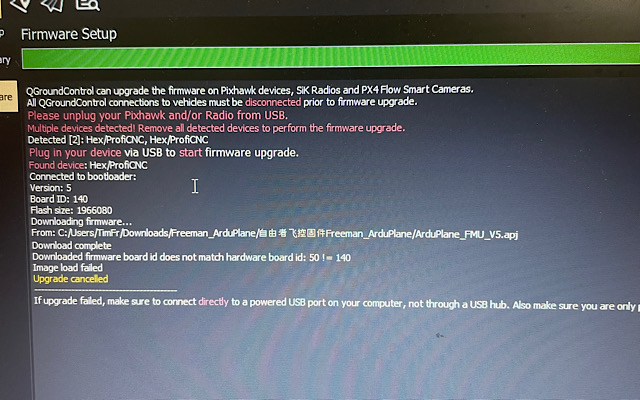
Which assumption was that? The image below that came with the MFE firmware? I only have Pixhawk 1s to test and it worked for me. So it’s possible that this documentation is incorrect. I thought @mike_E had success loading with an orange cube but maybe he wasn’t using the custom firmware. I get so many private messages that it may not be in a thread post above. Not sure what FC was used by @Hadits_Baroya.
MFE firmware had problems loading on both the black and orange cubes.
I used finwing’s firmware wo/any problems but I’m now using the last stable ver (4.07) from ardupilot.
I don’t have the _FILT params showing up but it flies reasonably well. The only problem was severe hunting after LO so I changed from an I2C to CAN gps (and have just gotten a HERE 3 to try).
Here’s a clip of an auto TO and transition to waypoint mode…
I have never seen that yaw problem… and I don’t have a pitot tube installed yet.
It’ll be a bit before I can get to the storage shed where the Freeman is resting to pull the latest params, I’m trying to get the Vtbird tilt motor working so its handy whereas the Freeman is behind a bunch of other “BIRDS”