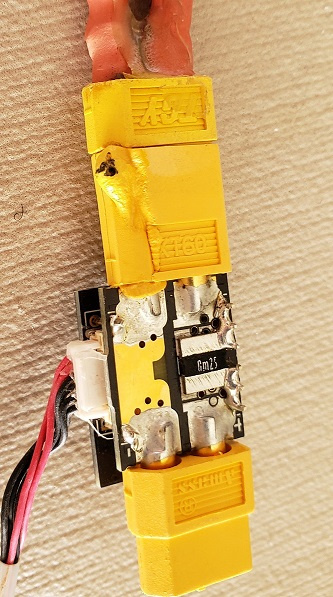
The connector…
1 Like
I am using I’m a 200a mauch power mornitor, these motors more Likely pull more than 60a combined so using that power module is not a good idea.
Cheers
I’m using a Mauch Power Module as well. You can use a 100A unit too because the Hall-effect sensor simply clips if you exceed the 100A, unlike the 3DR PMs that were meant for much lower current projects. I also use XT90 connectors instead of XT60.
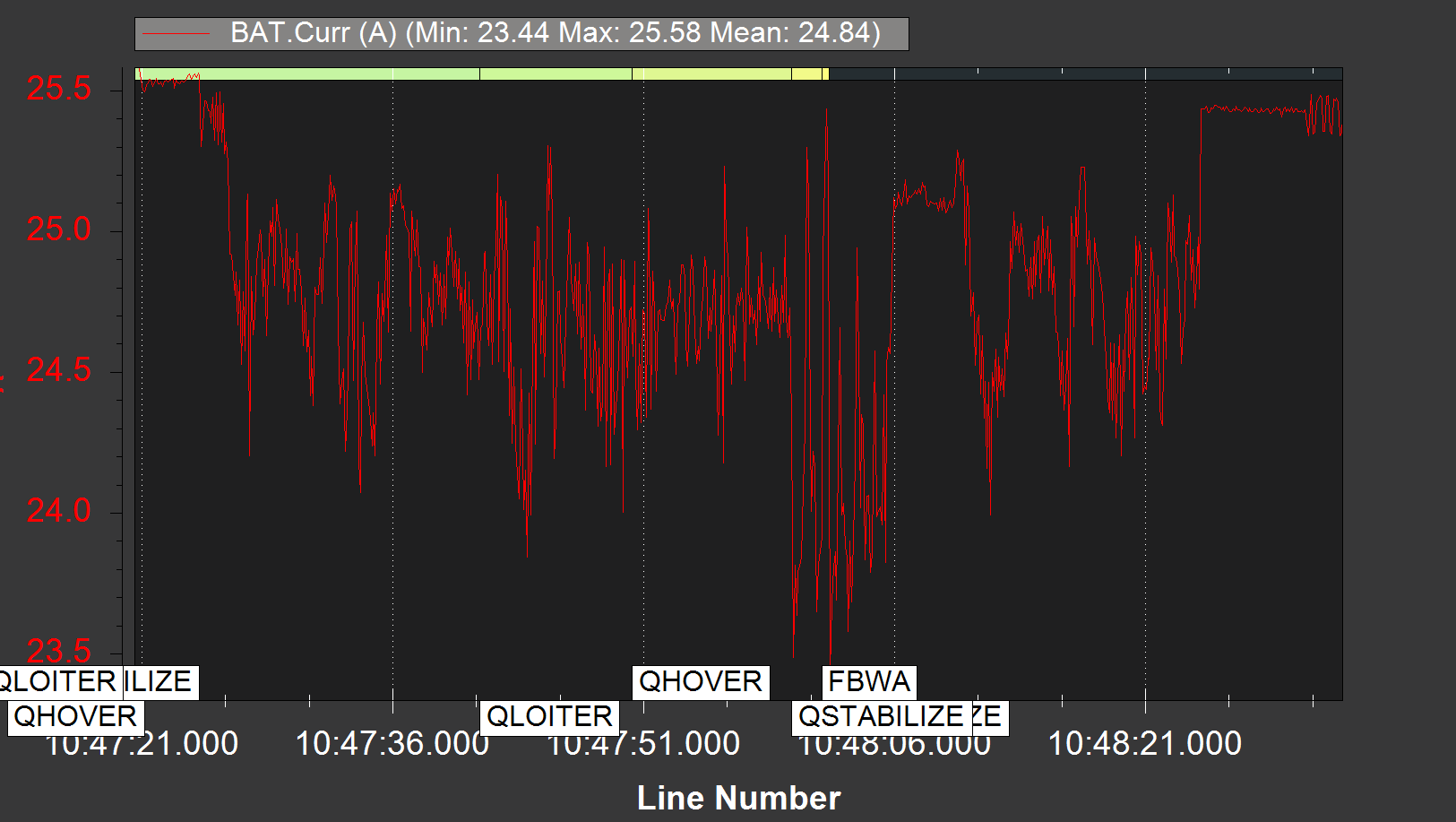
My Freeman hovers around 40amps. The current will vary based upon ascending or descending or props used.
1 Like
Just ordered the mauch 100 and connectors for the cube.
I was also curious why my graph starts at the top and not at zero…
Probably wrong BATT setup in Mission Planner or a bad Power Module.
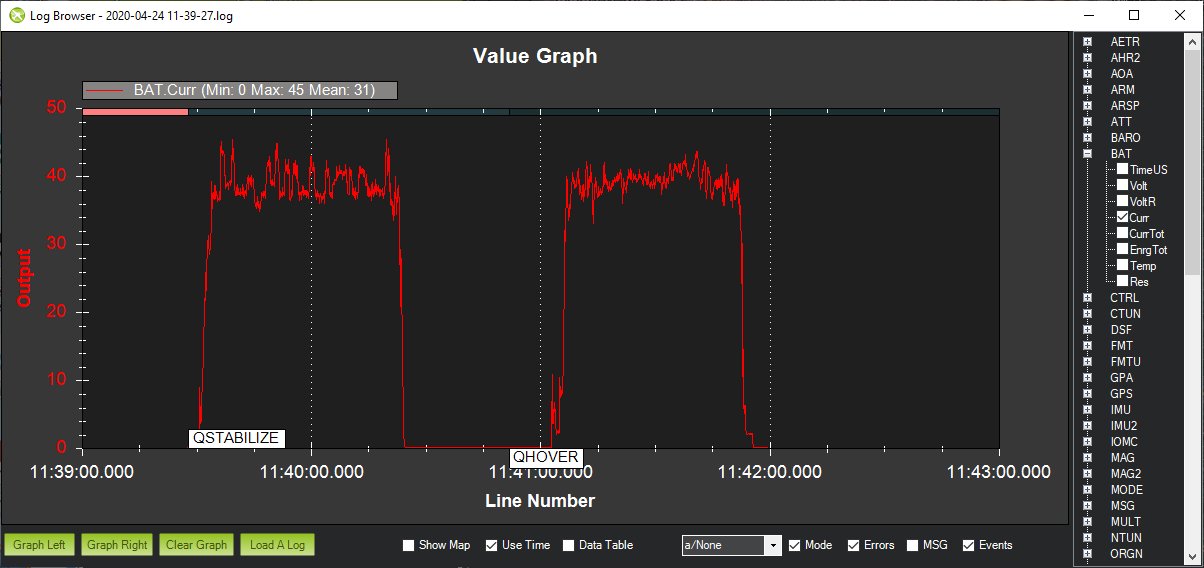
For your next test, on a calm day, try a short hover in QSTABILIZE mode, then switch to QHOVER mode, then switch to QLOITER mode. Fly each mode for 10-15 seconds, land, and disarm. Either post the .BIN file (best) or post a graph of the BAT Curr with only the Mode box checked.
Good luck!
First, kudos to Drone2us for quick delivery. Their web site was spartan but the items shipped from MN and were here in a few days.
Posting the bin. I cycled thru the modes before arming to make sure I would be flipping the right switches.
It was real squirrely. I had to nudge it a lot to keep it in the small area I was in.
Using a Mauch. Didn’t feel to warm after landing.
I’m using your parameters which worked wonderfully on the first one I had. That one was amazingly solid. This one… not so amazing 
Pending your look over I’ll start the autotune route. (and the compass wasn’t very happy either!)
(file is to big to upload so here’s a link to my cloud)
https://1drv.ms/u/s!AirTDTqBpL8jrjbZq8zhrN0ehuZw
PS the FBWA was a switch error…
Mike,
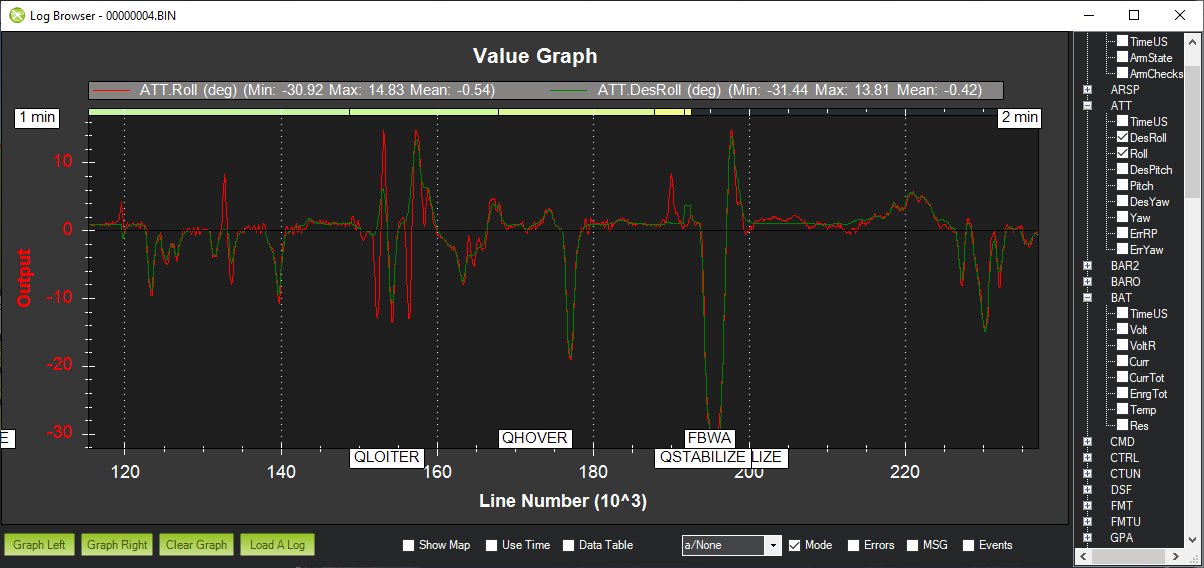
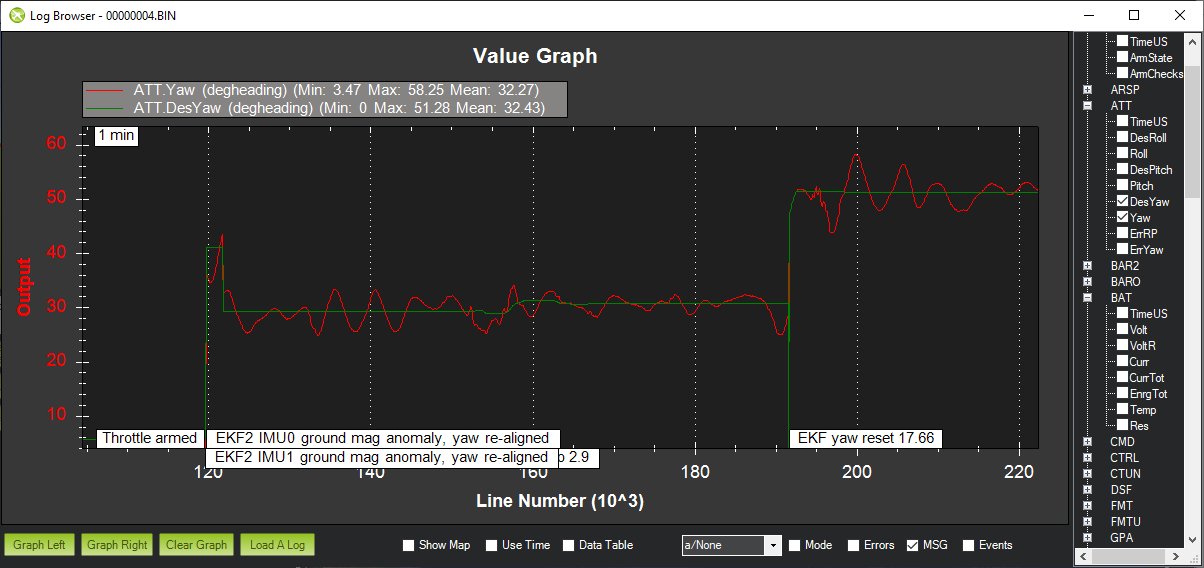
I would look at the compass installation and calibration first before going the Autotune route. You may be getting interference from the motors as shown in the graphs below from your .bin file. The pitch and roll compensation looks fine other than when you change the sticks. The yaw, however, looks suspicious as it sees a ground mag anomaly on take-off and a reset when you go back to QSTABILIZE mode.
Perhaps you can post an image of your GPS/compass installation. Try adding some copper tape underneath the GPS puck. On your next hover test, pick the plane up and move it nose forward 3 feet (or more) and then set it down again.
I’ll give you a warning on using the Autotune procedure. A possibility exists where the ESC can de-sync from the motor and make the plane fall from the sky. So read up on the feature and do your Autotunes relatively low in altitude.

If you are using a liion battery, these apparently give off a lot of EMI under load
I’m amazed you can get all that info from that data! And thankful you took the time. I will do as suggested, thank you…
Do you use multicopter- or airplane-ESCs for the front motors?
Multicopter because they are needed to hover.
Thank you for fast answer. Thats what I was thinking, but wanted to be sure.
Ordering tonight/tomorrow, hope the combo works for the 6,1 kg Freeman 2300.
Rear: T-Motor MN4014 KV400 + HobbyWing XRotor 40A ESC No BEC
Front: T-Motor AT3520 550 KV + any 60A+ multirotor ESC…
Propellers… have some already to test with, Tiger Motors and APC.
You can use the HobbyWing XRotor 40A ESC (No BEC) for all four motors. They won’t even get warm.
Good luck!
As a follow-up Greg,
I flew another QuadPlane using the exact same parameters (basically yours) and it was great.
A friend gave me another Here2 to use so that and some housekeeping, all should be well - I hope!
BTW, I never heard of that bit about the plane dropping out of the sky w/Autotune!
Yeah, there are post references to it in this thread (195, 202, 213, 215) from skyveyor (David) who lost several Freeman VTOLs. Remember that this is QAutotune and not Autotune. For details, you can check out the thread below, starting at about post 70. Above post 70, other people have had issues so make sure that you fully understand how it works before you try it.
Hi Greg, few quick questions, how many compasses are you running? I keep getting errors with my cube I think it’s faulty after a crash so just running the here3 can compass seems to be working fine.
I find it turns way slower than the believer, is that all the extra weight or my throws?
It transitioned into quad mode mid flight would that be due to lack of airspeed?
Do you know who I can talk to, to get the package place autonomous mode into the plane options. It’s only for copter right now
Cheers
Hi Paul,
I have always used one compass on my planes or VTOLs. Many folks don’t even use a compass on a plane and just use the GPS information. However, for a VTOL, we need a compass for good hovering. The single compass needs a clean mounted environment.
On some of my hexacopters, I have used a second compass but it was mostly for testing the blending feature and redundancy.
It’s probably your throws or MIXING_GAIN. My MIXING_GAIN is set to 1.2, the maximum I believe. You can also change the SERVOx_MAX or SERVOx_MIN settings on your v-tail to slightly increase the throw range. Make sure features like Q_ASSIST_ANGLE and Q_ANGLE_MAX are not kicking the quad motors in on turns as this will make your plane feel like it’s lumbering along.
It could be caused by many things. Low airspeed, like you mentioned. Stuff I mentioned above or even altitude. Check your Q_ASSIST settings and graph your .bin file to look for a message when the transition occured.
I don’t understand the question.
Cheers!
I wonder if a Here3 using RTK would eliminate the need of a compass again?
Mike,
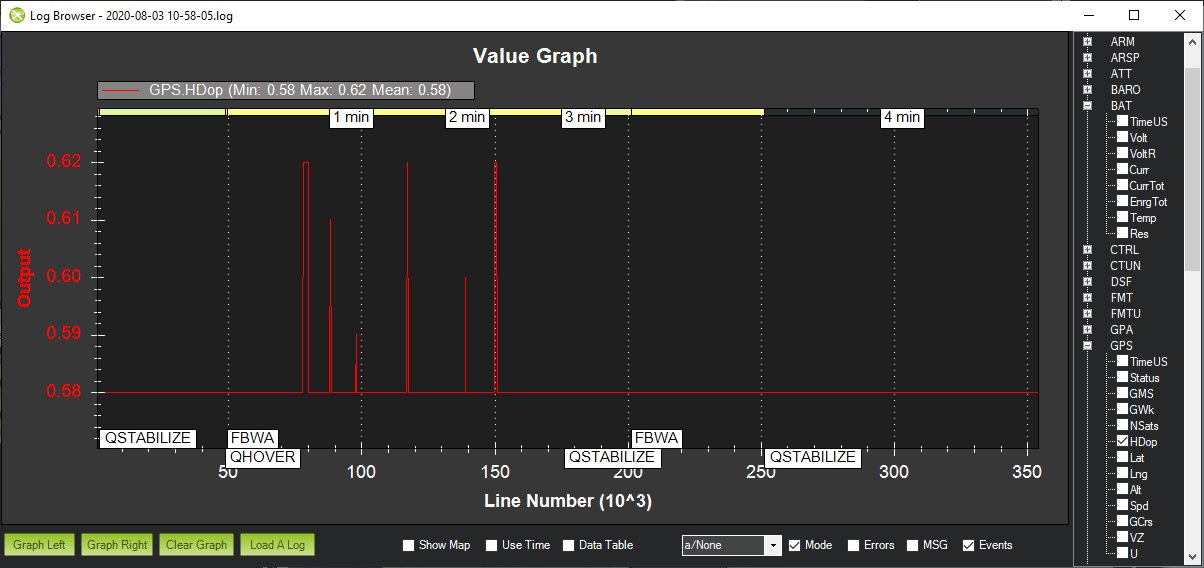
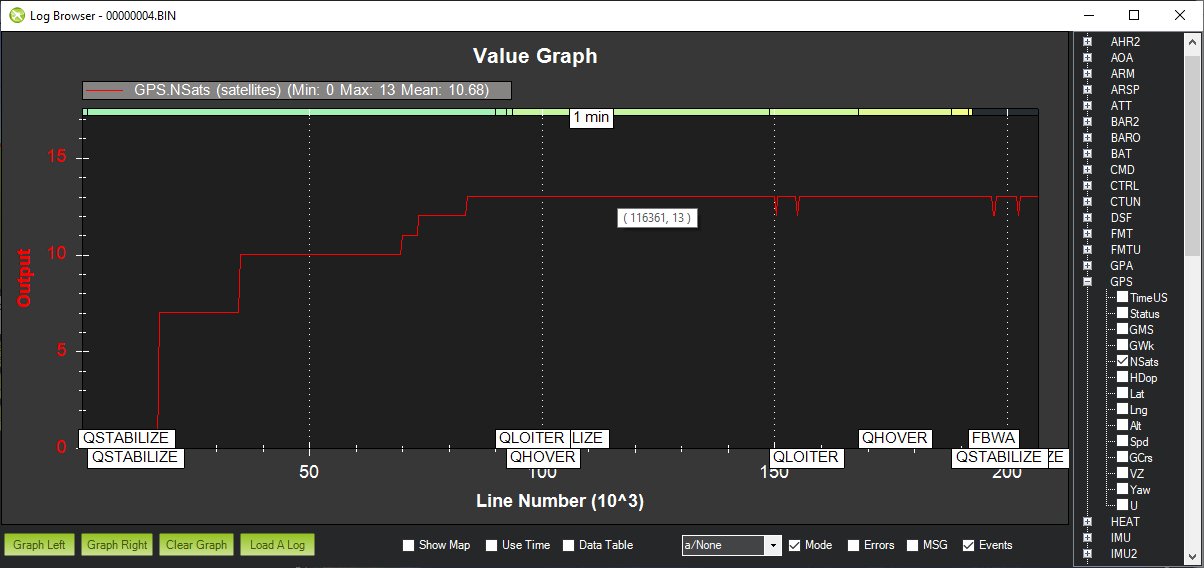
Your GPS shows fair performance. Perhaps you simply could have waited a bit longer before taking off. If this was your first time in that area, it may take a few minutes to capture 17-20 satellites. You had an HDop that was still changing due to new satellites coming in.
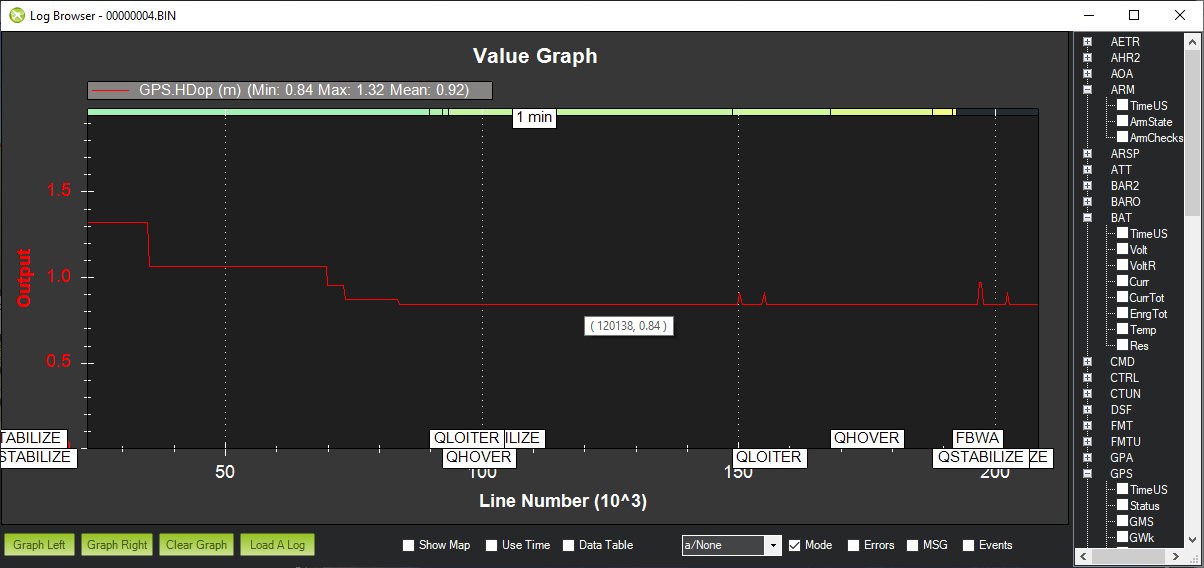
Here is an example below of one of my flights on the Freeman. I have more satellites and a lower Hdop…meaning a better 3D fix. The values remain quite steady.