Yes, in a hover and transition 50A ESCs are sufficient. However, if you intend to do a q-tune you may see total amps spike to 250. Crazy! The spikes are intermittent so you should be fine.
I just joined this group because of this thread. Needed lots of the information posted (although I could have used the quad esc calibration tip earlier  )
)
2 Likes
Hi Mike,
Welcome! The APM WiKi has improved greatly over the past few years, especially for Quadplanes.
Good luck with your build and testing.
2 Likes
Hi Guys,
Finally, I have time to try the full flight from Vertical takeoff - forward flight - Vertical landing.
basically, everything is working and I able to do full flight, but, there is something strange when I switch to FBWA mode from QLOITER. The plane wants to do yaw. what probably causing this?
I’m a little terrified when this happens.
PS:
- my airspeed is turned off because it is not calibrated yet.
- the transition is not happening in this section, I directly switch to QLOITER when seeing the plane yawing by it self, to prevent bad things happen.
Hadits,
Check to see if the Q_WVANE_GAIN is disabled (set to 0). You can read more about the Weathervaning feature here. Also, try moving the plane forward a bit, in the desired direction of flight, just before changing to FBWA.
That being said, I have also seen this issue when using the standard Ardupilot firmware. The transition will still happen after the yawing stops, but the direction of flight may not be what you intended. Once you have gained some speed, you can change it with the sticks.
So, what was my fix? I was sent custom firmware by MFE and tested it. It worked perfectly using their parameters for both hovering and forward flight. No yaw issues…perfect transitions. Use this firmware at your own risk! It exposes several parameters not normally controlled by the user. Do not open bug tickets for APM firmware but rather e-mail Mr. Chang Liu at MFE if you feel that you have a firmware issue. The RAR file contains builds for all Pixhawk versions and documentation.
MFE Custom Firmware for Freeman VTOL (4meg RAR file)
MFE Freeman 2100.param (19.5 KB)
MFE Freeman 2300 .param (19.5 KB)
1 Like
Hi Greg,
allright i will check the Q_WVANE_GAIN on my parameter.
the custom firmware looks more promising. have you test it for full auto flight ?
Downloaded the Rar file, and i read the readme.txt
currently, i’m using arduplane 4.0.5 . to install this custom firmware. i just need to upload the .apj file, right ? or do i need to install the 3.10.0-dev first ?
No, I have not, but they didn’t make any changes in that area.
Correct. Use the appropriate Vx file for your version of Pixhawk.
Hi @GregCovey , I did the flight this morning with the custom firmware from MFE.
it works great, I don’t have any issues when performing vertical flight or forward flight.
Thank you !
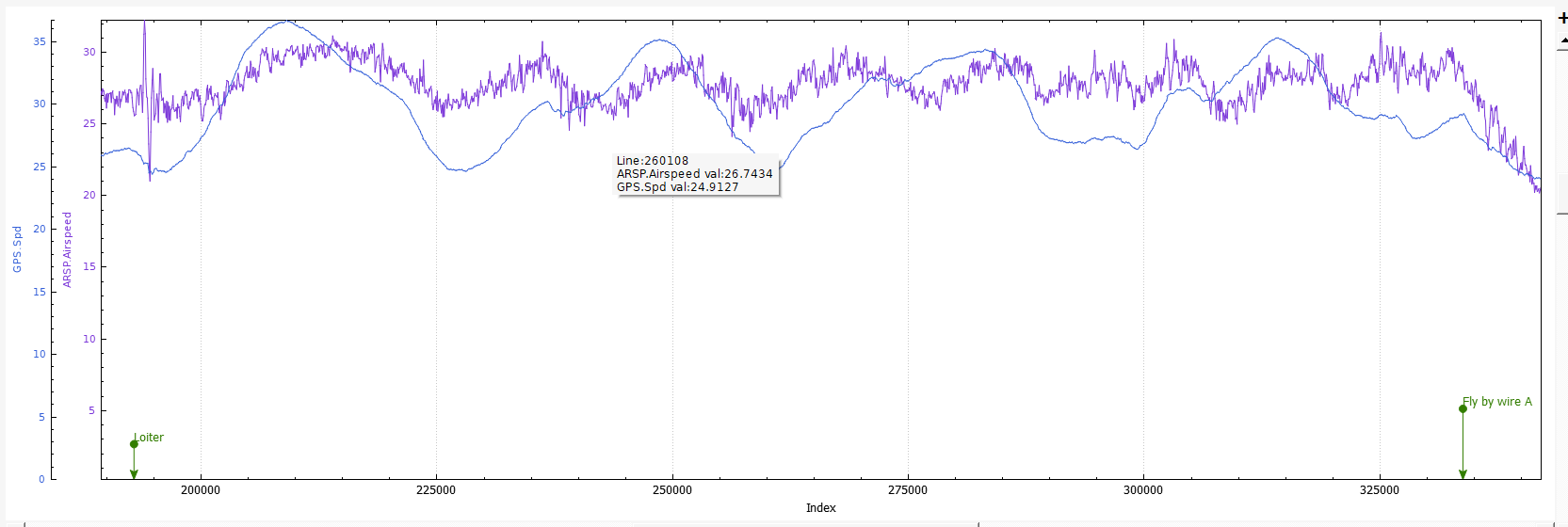
I’ve done first airspeed calibration, and i think it is not good enough. the airspeed ration is near 4.
where is the best place to put the airspeed sensor ? or maybe my pitot tube is too short ?
Airspeed Vs GPS Speed Graph ( I did the calibration in loiter mode, and the wind is about 4-6 m/s)
Pitot Tube placement

Once the airspeed calibration is complete, i’m ready to test full automatic flight.
1 Like
Hadits,
Congratulations on your maiden transition flight! The first one is always nervous for me.
On the air speed sensor, did you have the pitot tube properly covered when boot-up the Pixhawk? Your position looks fine. What type of sensor are you using?
Hi Greg,
my thumbs shake when i did the first forward flight. 
yes, it is covered when the pixhawk boot-up.
maybe it is caused by the speed too high while performing the calibration.
Anyone here using powerdistribution board ? to make the wiring looks nicer.
1 Like
So today I made a full automatic flight from take-off and landing. everything is working fine.
Thank you @GregCovey and others for the help.
Flight Pattern :
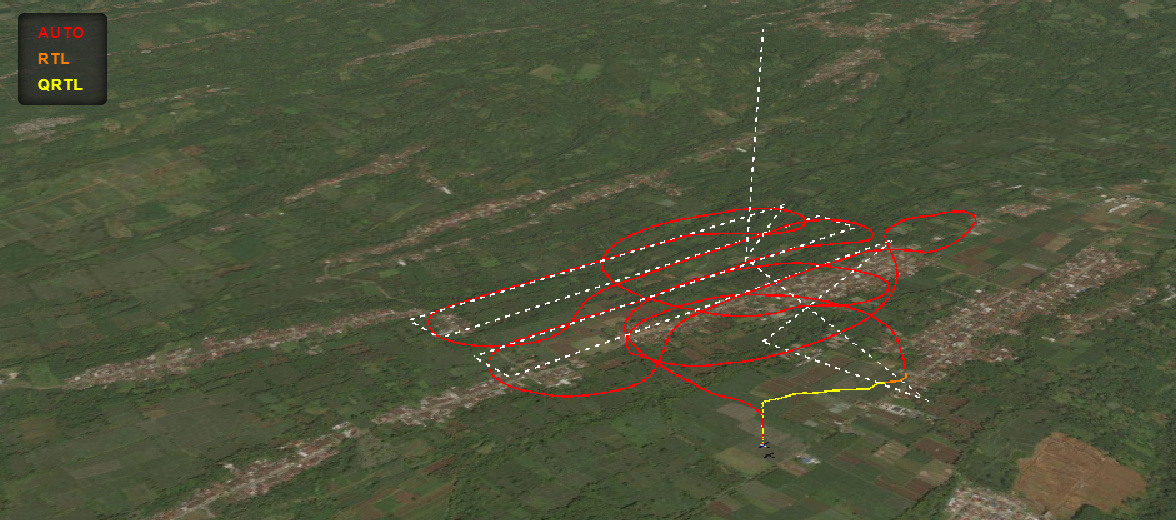
Currently, I cannot share any information about the current draw, because I’m not using current sensor. Next, I will buy some Mauch Sensor. The throttle is about 7-20%
1 Like
Excellent! I am glad that you are having success with the Freeman VTOL.
Installed a cube orange + here3, + lidar, whoah this baby is stable, auto missions are a win, just gotta learn some Lua scripting to perform some delivery missions. 

1 Like
Hi Paul,
Can you post some images of your LIDAR installation?
Cheers!
1 Like
Finished!
Some many little problems … none to do w/the airframe…
The biggest was getting the parameters for the Orange cube squared away (btw, if your using an older Here2, be SURE to update the firmware if your using CAN…). And I ended up buying new SD cards to get one that saved fast enough.
Ready for flight tests. Well the plane is, I have to wait a week 
Mike,
Good luck with your flight tests!
Hi Greg, sorry was busy and forgot to recheck this page, Thanks for all your input on this build helped me a lot. it’s just a lil TFmini does about 7m range outdoor, good for landing trying to incorporate it into delivery missions. 

Hey guys I’m building mine a little bit different then conventional drone builds.
Skipped the wing connector rubbish (easy point of failure connection / hotspot / solder fails.)
Ran the cables straight through the arms, (don’t plan on pulling it apart)
No PDB, joined the 2x 14 awg motor power wires in each arm to a 10 awg, then popped them into a connector with the mauch BEC. & a castle BEC 10a.
10a BEC into the cube rail was enough to power the tilt rotors, servos & RFD 900 telemetry.
14000mah batty
Airspeed sensor
Here3 GPS, TFmini lidar, cube orange & foxeer hdcam/dvr Vtx.





1 Like
Hi Paul,
Thanks for the pics! I see the TFmini is mounted on the chute hatch. I am curious to hear your results on landings with the TFmini. I experimented years ago using the Maxbotix I2C Sonar and didn’t like the results but perhaps the APM software has been greatly enhanced since then. I also like the serial interface of the TFmini over the I2C bus that I used.
Good luck!
Maidened! The first Freeman I had was unbelievably solid. This one - not so much…
Mostly drifting backward. One problem with the amp draw but first, transitioned, flew FBWA and auto and all went well.
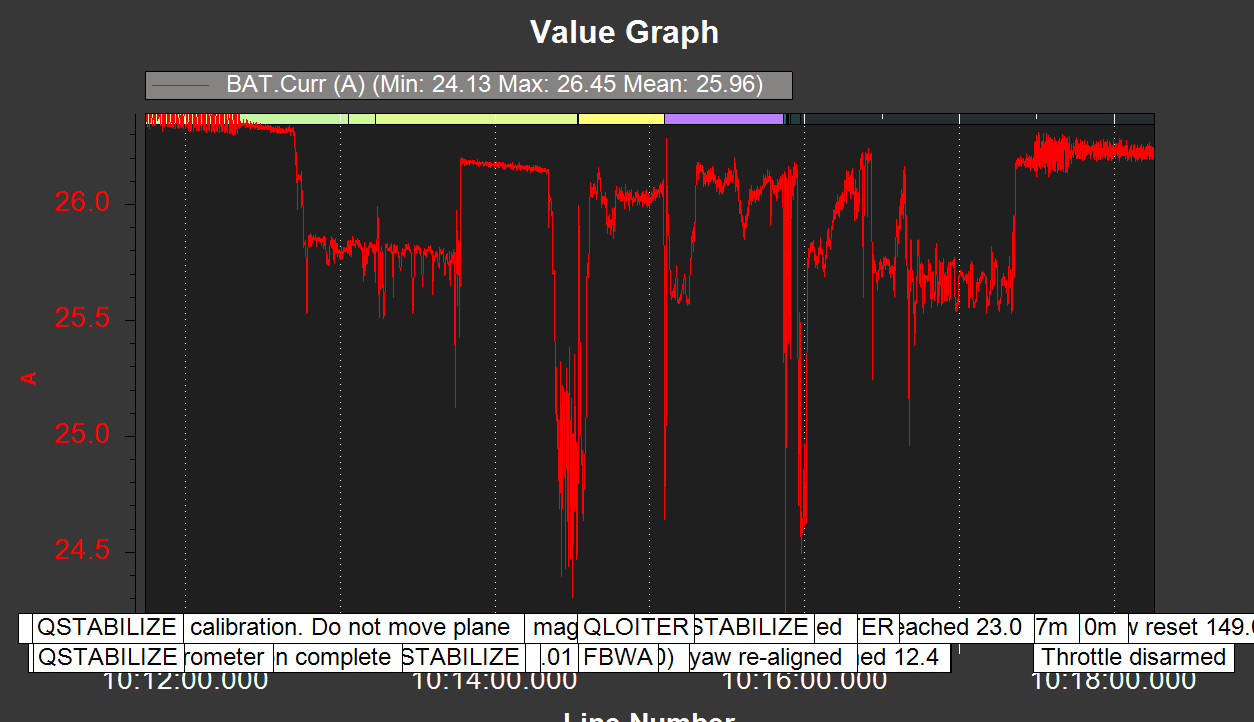
After landing after few short minutes, the wires were too hot to unplug! The XT60 connector melted to the power module! The module itself looks OK and nothing melted on the other end so I guess that particular connector was bad? Attached the amp graph and it looks reasonable to me w/a max of 27A. I assume that’s total and not per motor. The 16,000 lipos were just under 4.0V resting and were cool.