I think the KDE Direct KDE3510XF 475KV 4-6S 30A 120g 665W and with 15.5x5.3" propeller 1580g (50%) and 3520g (100%) would be perfect for the rear motors.
I am still trying to find motors for the front with a 6 kg Freeman.
But why not use the same for the front motors?
But use smaller diameter and larger pitch?
There are no specs for this, but what would be the difference using that instead of 15.5x5"?
On the Believer we also use KDE multirotor-motors and it works fine.
What may happen? Do the Power (W) go up too much?
The front motors used in the 8 kg Freeman … seems heavy and overkill for the 6 kg Freeman we are building.
Welcome back. I hope that you stayed safe from COVID-19. In Upstate NY, we are doing quite well but not so good in other parts of the country.
The main reason for using different motors is to keep the power level control by the flight controller centered when different sized props are used. The front motors use a higher pitch for efficient forward flying that requires higher speed. You trade hovering efficiency for forward flight efficiency. A mapping VTOL really only hovers for a short time and flies for a longer time. That being said, there are wider windows that you can operate in so there is some flexibility in your design. Flying with a lower weight also changes your choices.
Im back from other RC-projects, not any disease, following strict rules = much more time for RC.
Regarding the front motors I am not sure how to think when finding a good setup.
The model is 6 kg. Should I need 1:1 power:weight-ratio to throw it by hand without getting too much “close-to-ground”-effect when throwing? Or is less enough when doing transition up in the air?
I have a lot of motors in a list but I dont know how to choose to get a good forward-front-motor that can hover around 40-60%. KV should be 450-550 I guess? That was what I used to think when getting the motors for the Believer, 515KV.
It is usually best to have some “wiggle room” when designing your power system. Hobbyists that are not actually using their vehicle for mapping tend to hover longer and therefor benefit from having a greater power system design. You have examples on what to use for the Freeman 2300 from the Configuration List so your guess of 450-550Kv is correct.
The PNP versions were dropped temporarily due to export restrictions from the Coronavirus. We haven’t had an update in a month or so but I see that AliExpress still only has the kits.
PNP Versions are available.
I ordered 2 PNPs and by next month they should arrived at my home (Indonesia).
This is my second type VTOL Kits.
My First kit was Skywalker 1800. I was sucessfull converting it to VTOL and build it a few.
i hope this kit will give me more flight time and efficiency to do some survey.
A friend at the field caught a few passes of my Freeman 2100 VTOL as I was testing some custom firmware by MFE. The MFE PIDs work great for both the hover and forward flight modes. No need to run AUTOTUNE or QAUTOTUNE. The MFE firmware has smoother transitions. I have also changed my front two props to APC 14x8.5. The $6 e-props are available from APC Direct and shipped for only a few dollars in the U.S.
Maybe I’ll bring my telescopic lens next time as I removed much of the video since the plane was a tiny dot in the sky.
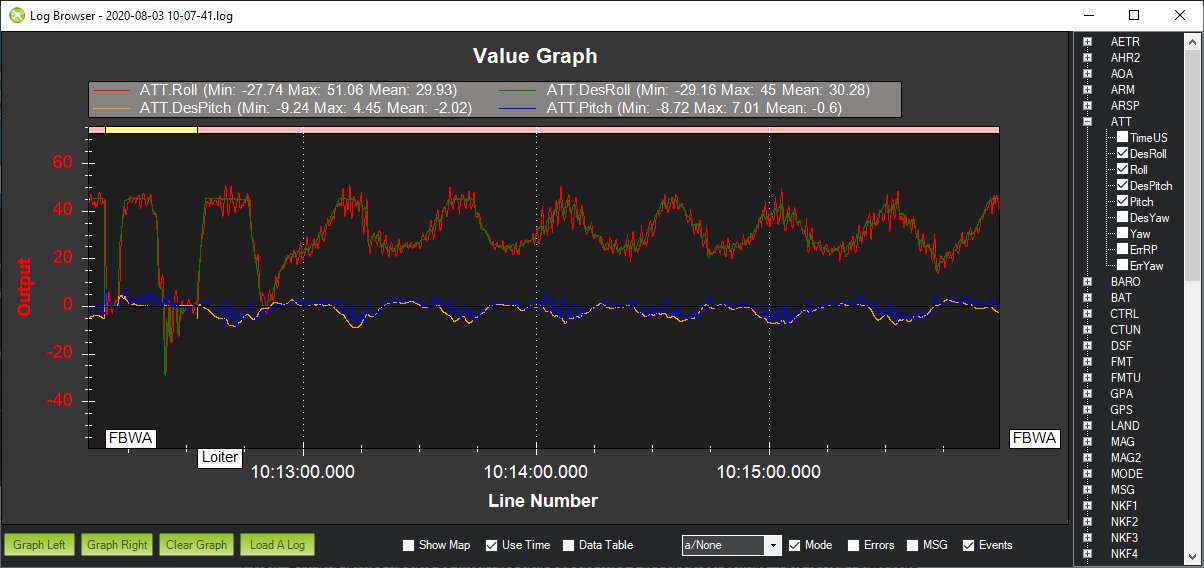
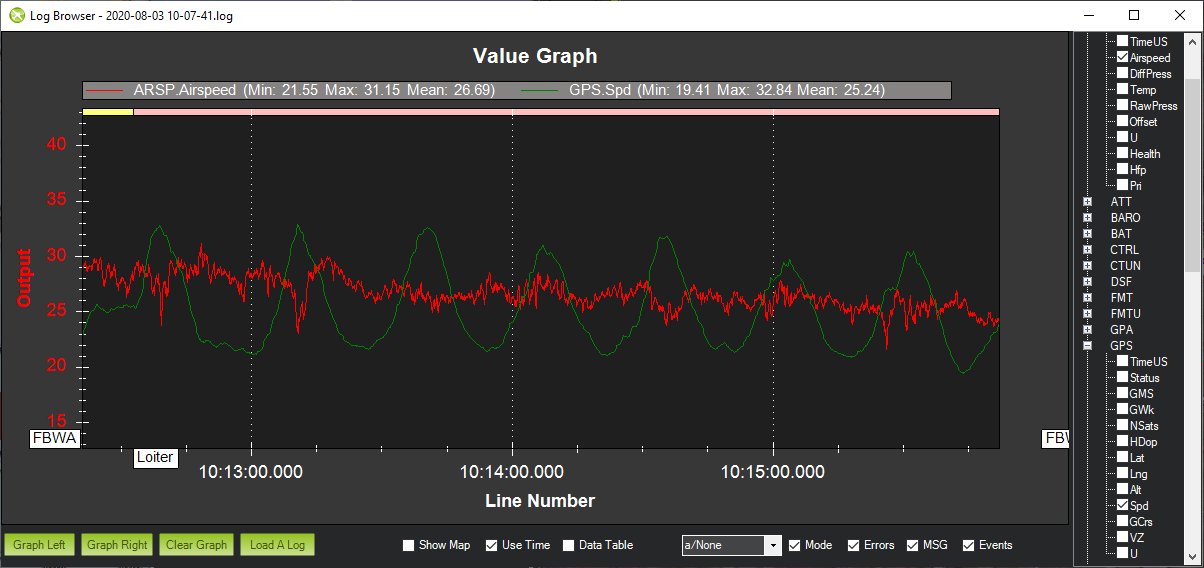
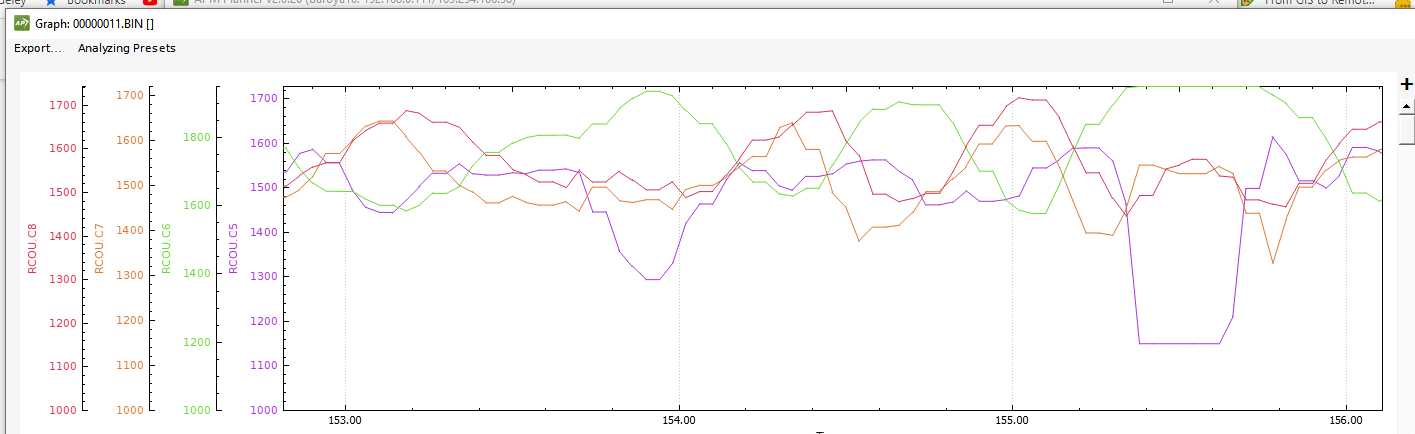
After reading a post on RC Groups, I discovered a powerful Web-based analysis tool called the UAV LogViewer. This utility provides an easy to use viewer for ArduPilot dataflash and telemetry logs. The big advantage here is that you don’t need a tlog that requires recording from your GCS. You can simply use the dataflash .bin file to replay your flight. Since I uses the Yaapu telemetry, I often don’t connect with Mission Planner. It allows you to look closer at the transitions so that you don’t have to do it from memory. Very cool stuff!
The first two images are from my video flight above. The third image is from the flight before where I was using Loiter mode. You can graph any data point found in the .bin file and zoom in for a closer look.
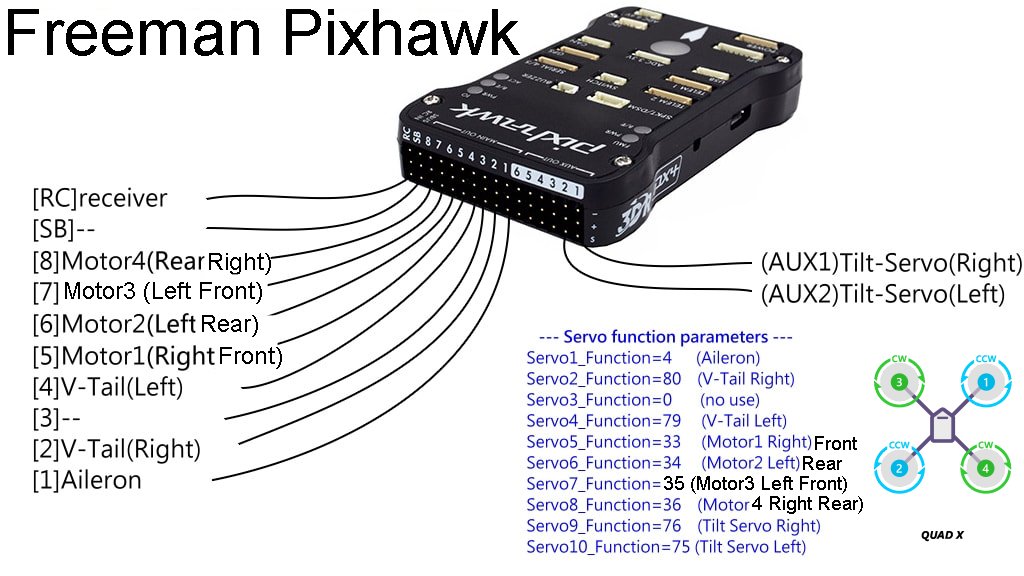
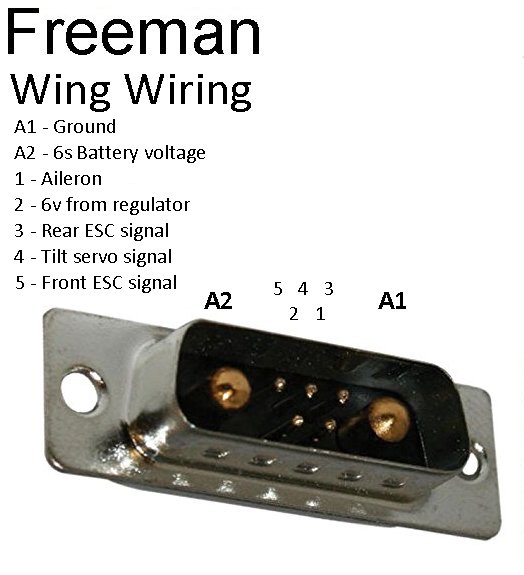
See post #38 for building the body. Then read the thread for the VTOL wing wiring. Only use my latest posted .param files. Some of my earlier files have the Q_TILT_MASK incorrectly set to 3 instead of 5. You can also use the MFE stock .param files (below) as a starting point. MFE Freeman 2100.param (19.5 KB) MFE Freeman 2300 .param (19.5 KB)
Hi all!
After following this thread some time I decided to order a Freeman 2100 kit and awaiting it hopefully in the next days.
I ordered Sunnysky 3520 520kv motors and want to use 1485 Apc props as recommended. For rear motors I have 2 4114 340kv motors lying around here from a former copter project and 1555 folding props.
Before starting with this setup I have some open questions: @GregCovey: As I have ordered the same motors, are you satisfied with the standoff solution on the tilt Servos? And how are your long-term experiences with the 3115 Servos?
2) Do you think my rear motors are sufficient enough due to lower kv? I looked up at the specs and with 1555 props it provides about 2600 grams max thrust on 6s.
3) What is the mass of the “naked” Freeman 2100(fuselage +wings w/o any additional gear)? I didn’t find any information regarding the weight in the specs, only MTOW and suggested payload mass.
Last question : I have a Holybro pixhawk 4 FC lying around here and intend to use it as FC for the Freeman, the Power Module can take up to 120 Amps. Is there any indication not to use it, which I maybe have overseen?
Thanks to all for this great thread, which was very helpful for me to decide to buy the kit!
Greetings,
Marcel
No issues with the stand-offs or the 3115 Robot Servos.
Possibly. You can always increase the prop size an inch if your hover test shows that the rear motor control signals are too close to the upper limit. Remember, you are not hovering for long with a VTOL.
I have been buying electric props directly from APC Propellers in the U.S. They are inexpensive, high quality, and have both normal and reverse pitch versions. The shipping is reasonably low too.
These are my only measurements. All up weight RTF is 11.63lbs (5.28kg).
Fuselage, Tail, and Nose Gimbal/Camera - 3.5lbs (1.59kg)
Hello good folks and thank you for a thread that is thick with good information and thin on the fluff.
I am considering the Freeman 2300, but have a few questions:
What endurance are people getting with various payload weights? It would be nice to have at least 2 hours (preferably 3) with a 2-3 lb payload using a large li ion.
Are there any other VTOL airframes at this approximate size that come close to or beat the Freeman 2300 in terms of endurance? This seems to be hard to beat for its size and price point.
What are some opinions on the PNP package that MFE offers, and are the parts of decent quality?
I’ve considered building a VTOL XUAV Talon, MFD MTD, Clouds, and was looking into building a VTOL Believer when I found this.
I haven’t used the PNP components so I can’t comment on that. Here are the flight range specifications from the various manuals. I would take them as guidelines.
Longest Flight Range
Freeman 2100 VTOL - 80km with 550g payload (6s 16AH LiPo)
Freeman 2300 VTOL - 60km with 900g payload (6s 22AH LiPo)
Fighter 2430 VTOL - 150km with 600g payload (12s 16AH LiPo)
Hello, Finally my freeman 2300 were assembled and i did a maiden flight in QStabilize mode.
but I have a problem, the plane cannot do a stable hover. left back motor always dipping.
here I attach the video, you can see at 00:08 it starts dipping.
what can possibly cause this ? is it a hardware problem or a settings problem?
Yes, that will work fine. If you graph the log of your hover test, you will see that the current draw (divided by 4) is very low for each motor/ESC combination.