Hi everyone!! my name is David and i’m sarting the build of one freeman 2100.
i have plenty of expertise building drones (multicopters), 3d printing and robotics.
i been reading this thread sincea couple of months but now i have all the thing (that i think) i need.
my question is approximately how much time took you to build this one.
thank you in advance.
Generally a full day, maybe 2 half days for the glue to dry. Cheers
Here’s a clip of my latest transition
Enjoy
2 Likes
Hi Gents,
I am read to take the plunge … maybe before I do I have a couple of questions for some of you on here.
Wiring first:
The orginal MFE wiring diagram shows to use two Ailerons left and right. Left should connect to Servo1 function and should plug into pixhawk port 1. While the right hand side aileron is only mentioned in the orginal wiring diagram to connect to Servo3 function… but all your diagram on here show it is going nowhere.
Do i have to use a Y-cable and connect the left and right aileron to the same port on the pixhawk FC, port 1?
I was able to load the MFE custom firmware, yes I am using a cube orange with ADSB. Every time I am trying to load the freeman 2300 parameter file the system is not functional. Rest param file and okay… Something is off here.
On that note has anyone tried to use a Herelink unit to fly the Freeman 2300?
The setup off the herelink is a little confusing 
I have attached the wiring and other things I found online. Love to figure out which setup will work best.
Thanks,
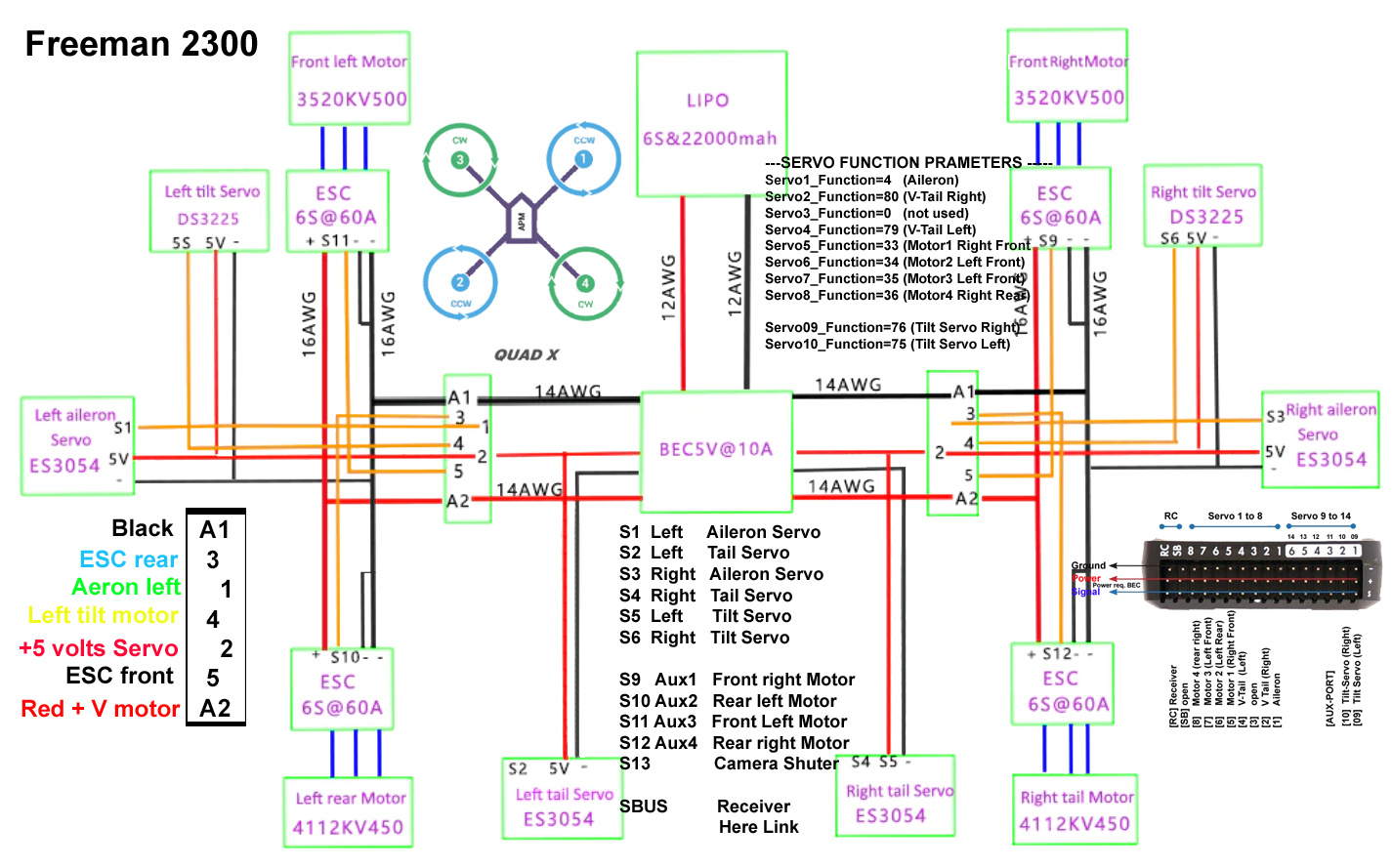
No, you can set it up any way you like using the SERVOx_FUNCTION command. You can use a Y-cable connected to one output or connect a single aileron servo to a single output on the Pixhawk.
Not sure what “not functional” means. Can you post the .param file that you are trying to use?
Cheers!
Hello Greg,
sorry for the delay, got side tracked today.
Please find attached the para file with I am trying to use. I downloaded it for the same directory where I got the firmware for the orange cube.
It is on the MFE download site on github
here is the link https://github.com/makeflyeasy/MFE_ArduPlane/tree/main/Freeman
Thanks
WernerMFE Freeman 2300 .param (19.5 KB)
Werner,
The .param file you attached is for using the Pixhawk outputs from the MFE documentation. The outputs do not match my DIY version so you need to choose which setup you want to follow.
Also, be sure that the safety switch has been activated so that the servo outputs can follow your R/C input controls.
Good luck!
Hi,
I had a crash today. I would like to share to you the video, parameters and the log. We were doing a auto mission, and the plane crashed while transition. The communication with the plane lost in the air, couldn’t figure out the reason. Tried to change mode to qhover but the plane was not responding. Hope someone can figure out what happened so we fix the mistake.
https://drive.google.com/drive/folders/1yCtmIBlAKg-3c74APDsPKDkQylYaXqex?usp=sharing
Hi Ozan,
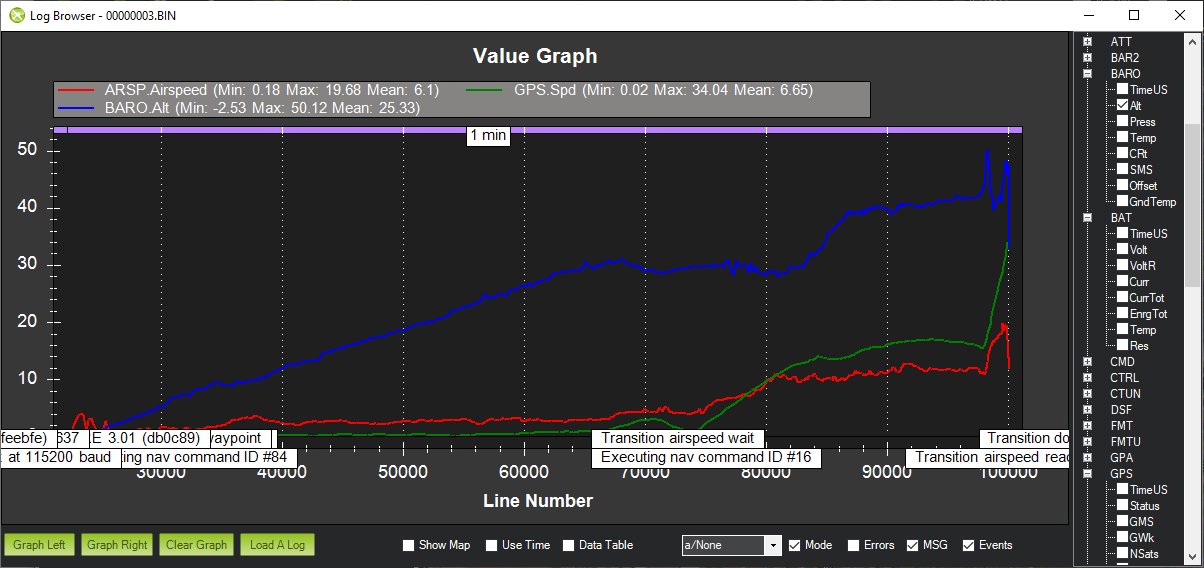
I am sorry to hear about your plane crash. I did a cursory check of your log and suspect that it stalled in flight. The air speed was lower than the ground speed which suggests a tail wind or perhaps an uncalibrated sensor. Since your ARSPD Min/Max values were 12-26 m/s, I also suspect that maybe your throttle was set to minimum instead of mid-stick. However, I am not certain if this matters in AUTO mode since I haven’t used it in a few years.
Lastly, your Q_ASSIST_SPEED setting was 0 so the plane could not save itself on a stall. This setting should be at the stall speed of 10m/s for safety.
1 Like
Hi,
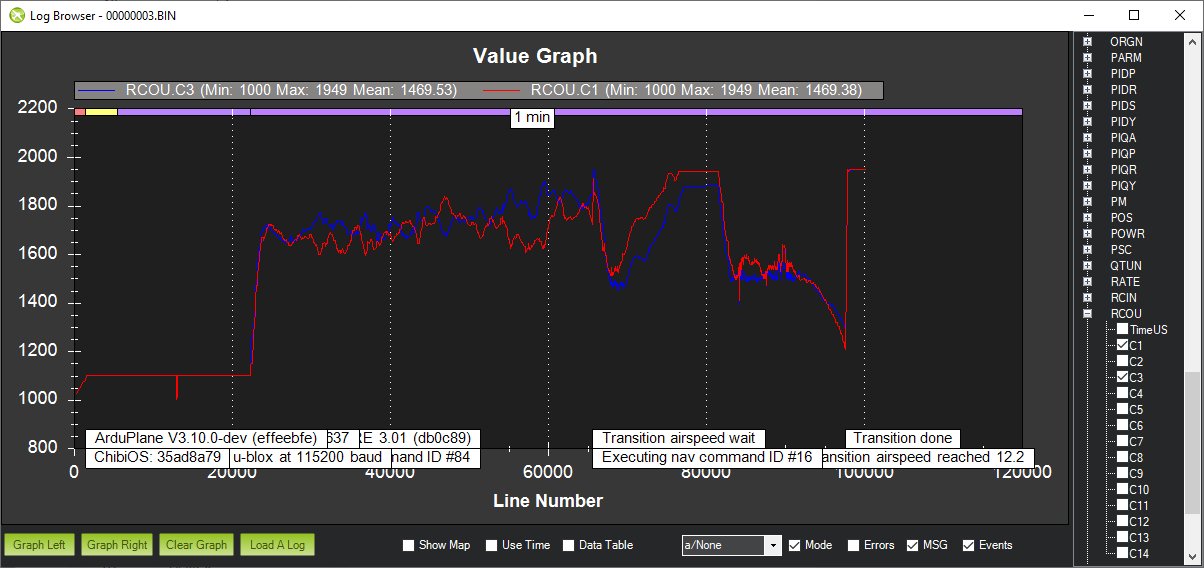
Thanks for reply. The throttle was always mid-stick through the whole thing. But that shouldn’t make a difference in auto mode I believe. The vehicle had a slight side wind during transition and yes I also suspect that the airspeed sensors calibration was off. Using sdp33 sensor. Recently changed from 5520. But the parameters of the previous airspeed sensor was on with some offset. I believe that was the major problem. But I didn’t understand why the throttle command is not %100 through the transition? Is that normal? Can you give a look?
We also suspect that the battery had over-demanded and exploded
.

But I’m not sure if the battery expolsion was after or before the crash. I suspect that because the log and the video transmission stops mid air. I’m pretty sure I switched to qhover flight mode before crash but I can’t see that in the logs. Thats a custom made 6S8p battery btw.
Your throttle stick setting was at the mid-position so that was not an issue. When the transition was completed, both Motor 1 and Motor 3 rev’d up to full power and the current draw increase showed that it was drawing full current to both motors. However, if the plane had already stalled, it may not have helped. It really needed to go into the Q_ASSIST_SPEED safety mode. This should have been tested before doing an AUTO flight. I always stall test fly my VTOLs at a high altitude by lowering the throttle in FBWA mode. It gives you peace of mind that the plane can save itself.
Cheers!
Thank you. Will do that next time.
See you later with good news.
Hi Greg,
Awesome build, i was wondering if you can share a log file with a successful build. I am trying to build one, but i have some tuning problems, like the tilting motors are moving to little when I change from manual to qstab. Cheers !
Hi Razvan,
It sounds more like you want a .param file. I can easily attach one below. Remember that I am using the MFE custom build below so there are new parameters visible not in the normal release code. We went through those above. Good luck!
ArduPlane v3.10.0-dev (effeebfe)
2020-08-07 10-06-00.log.param (20.9 KB)
Hey, thanks  Hope this will make my life easier. thanks again , really helpful to have a param list that works fine.
Hope this will make my life easier. thanks again , really helpful to have a param list that works fine.
Also I am using the newer version of ardupilot, will this affect the param list?
Cheers
Yes, my .param list is for the MFE custom firmware, not the standard APM Plane release.
Keep reading the posts above. I recall others using the standard APM Plane releases.
Good luck!
@GregCovey
Hey Greg…been a while…Hope you don’t mind but I had a question. Not specifically for the Freeman but I assume it would apply. So here goes. When the lift motors, non tilting ones finish their task and stop. How do you keep the props from spinning wildly and causing unwanted drag.
Just curious…
Hi Ricky,
I’ve never had that issue. Sometimes, the prop will turn slowly but typically not at all. It has never spun fast enough to cause an issue, even with our 18" props. Perhaps when the ESC is powered, but the motor is off, there is some residual force keeping it from spinning wildly.
Cheers!
Ah ok thanks Greg I very much appreciate it.
cheers