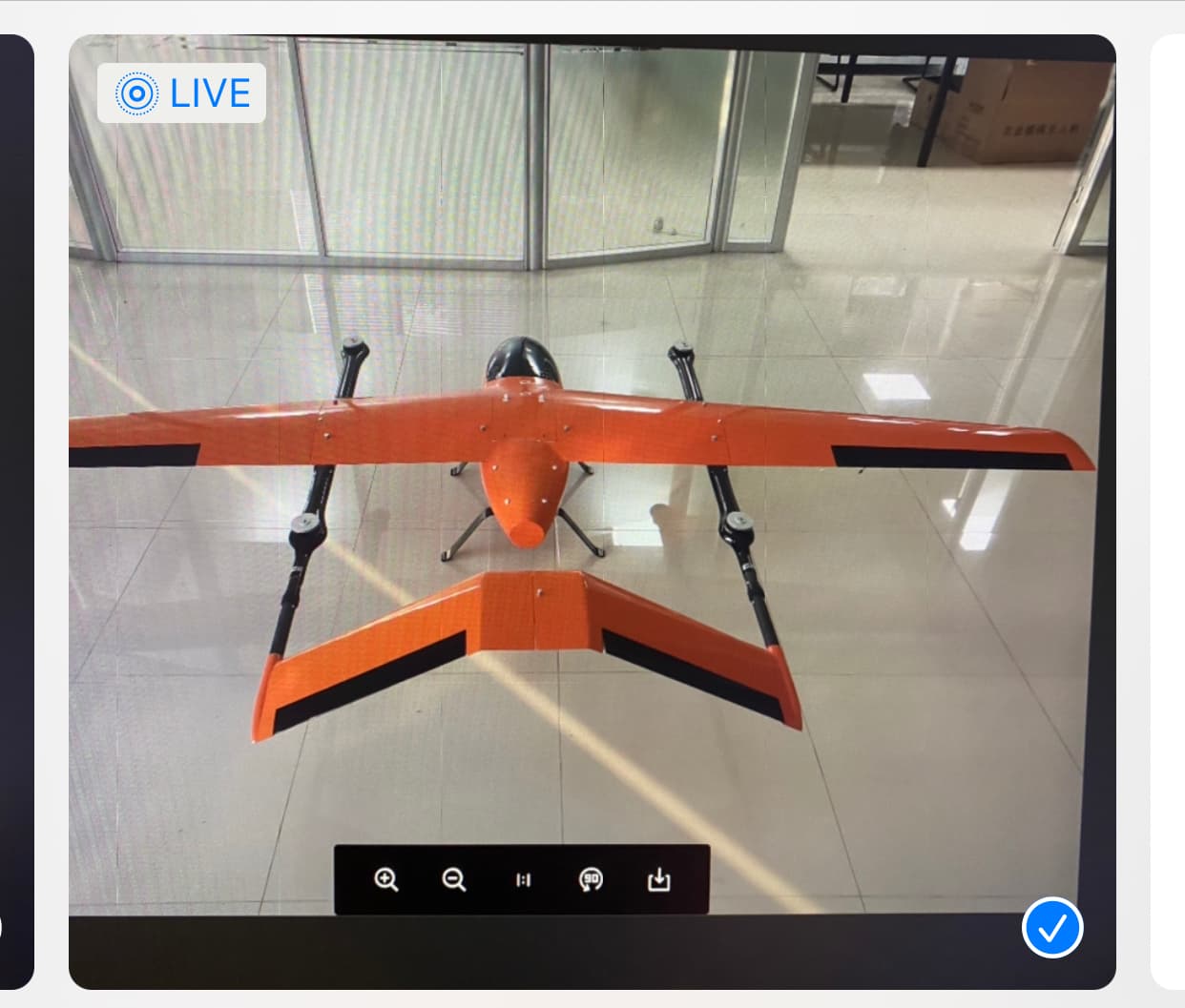
The Vtol plain was performing the 3rd flight since rebuilding after ending up on a tree due to extreme wind (my fault)
1st flight was few weeks ago just performed Qhold and QLoiter to test vertical part (windy day, didn’t want risk)
2nd flight was the first of yesterday. Normal take off, performed full flight without issues. Just a bit of trimming.
3rd flight was planning to re-check trim. Vtol take off, transition to fw flight, a bit of manual flight and once I was going to land ( manual to FBWA to aligh with runaway) the plane started to roll on one side then the other and endedup on a tree again. Minor damages this time.
Considering the behaviour I was quite sure that one servo failed but “of course” they all works fine (2x aileron, 2x A tail)
I checked the logs and I find out that:
I had bad gyro health while in flight
20-30 sec before switching to FBWA the compass went crazy
when I tried to convert I had gyro and accel bad health and EKF is all over the place
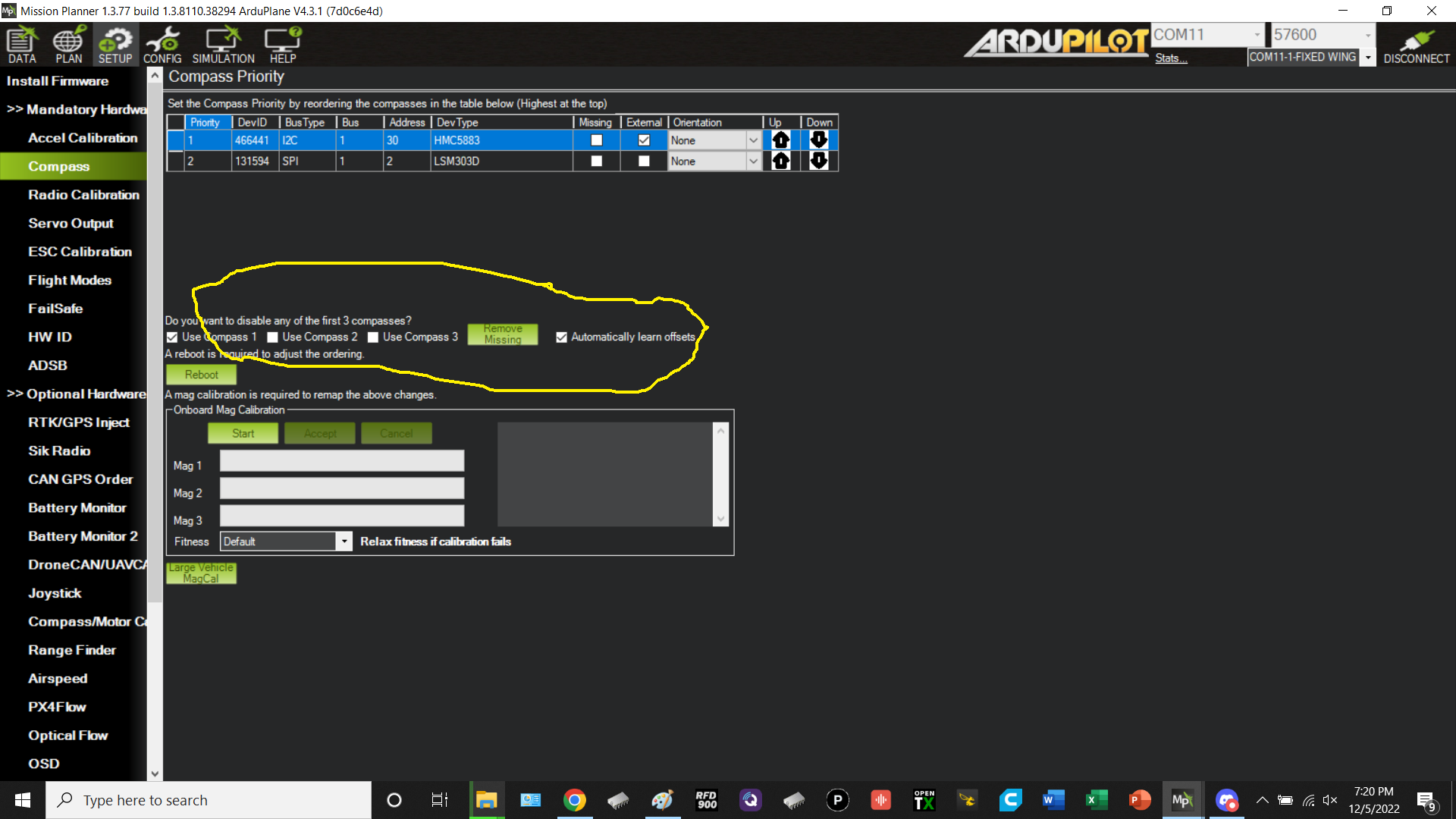
the flight controller is a pixhawk with 2mb of flash
GNSS unit is a matek F3 with full external baro (use as secondary)
I guess I will need to put in the bin the FC and replace is but I would like to have a second opinion.
Thats too bad. I wish I can help, I am far behind in VTOLS.
Looks like all the old timers like me taking a break lately. Maybe due to holiday season.
Anyway, I will try to review your log on the plane on Tuesday. Maybe look at the last active people on that thread and send them an email.
I will be working on this giant soon then I will have more knowledge to share, however I stick with Pixhawk or Cube FC’s. No experience with Maytek. I stick with Here2 or 3 GPS.
Oh no…that is so sad I missed that post. He was amazing. Now I am heart broken. I was trying to meet him in person but we couldn’t find the time to do it. He will be missed.
The disarm that you see is because I landed, change some setting for the servo (trim) and then flew again.
I have rudder as arm/disarm as all my systems so I’m aware what I can and can’t do. And no. I didn’t disarm in flight.
If you see during the second flight, while in manual mode, the compass suddenly rotates almost 90 degrees CCW while plane is keep moving forward. within 30 sec the correct heading is restored.
The “crash” starts as soon I switch back to fbwa when sensor need to provide assistance.
I could be wrong but bad gyro and inconsistent by 26 degrees are not related as gyro can’t tell you a degree error. This is referred to the compass.
I noticed the issue as well with gyro and then with accelerometer.
I got a telemetry module connected all the time during the flight