Hello,
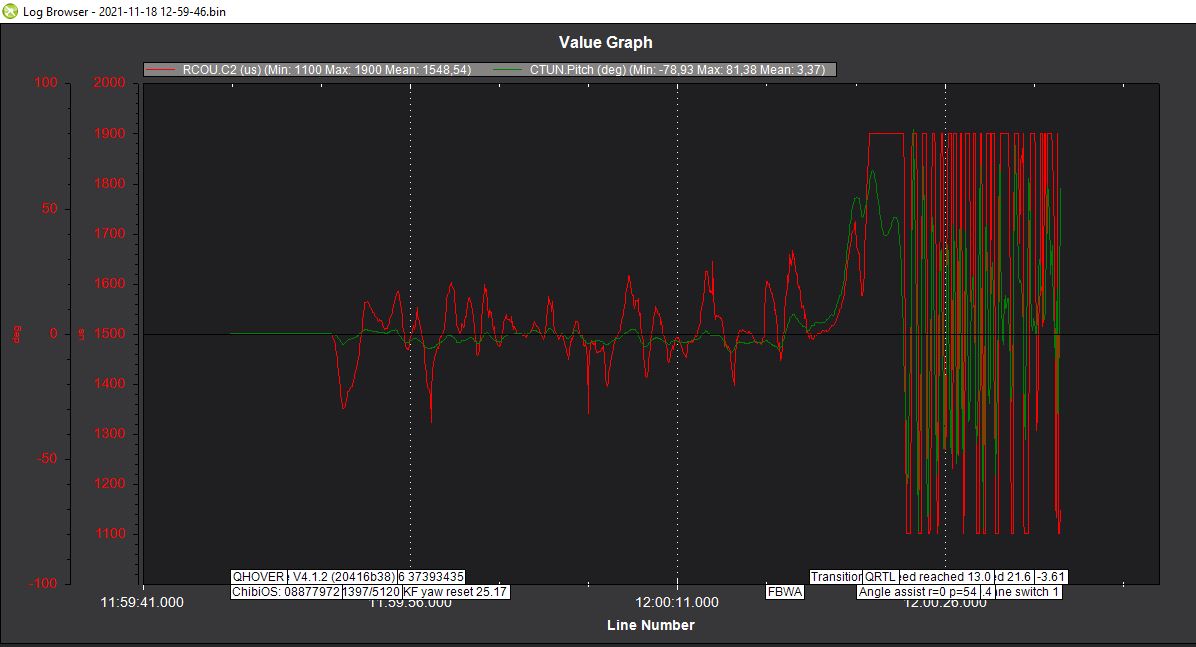
The quadplane in this topic is equiped with CUAV x7 PRO controller, using CUAV NEO 2 PRO GPS. I managed to make it hover quite stable in Qhover and Q loiter mode. Today i tried making the transition to Fixed wing (Qhover - FBWA). The front motor started spinning and the quad motors kept thrust until min airspeed ws reached. After that i got the message that transition airspeed was reached and the plane tilted up and i lost control. I tried switching back to Qhover but it started to spin out of control and eventualy crashed.
I have no idea where to begin to try and figure out what happened. I hope there is someone that can guide me in the right direction.
I have attached the log files (telemetry and dataflash).
https://drive.google.com/file/d/1__wsaK2eMRidGJSeGdPmiyrpvf8M-v2n/view?usp=sharing
HW Specs:
Frame - MFE Fighter VTOL 2430
12 S 12000 mah battery
Matek digital airspeed sensor
Thank you,
Mihai
EDIT>
attached the link with dataflash log and video of the crash
https://drive.google.com/drive/folders/1T6uC1Uu9Q9jYbsCDHAP7i5n8utM2Al0j?usp=sharing



 )
)