Hi,
I’m going to embark on this VTOL journey, hopefully have success in the end, learning along the way how PX4/Ardupilot works, but also helping someone else who is looking to build a similar VTOL setup.
Rolly has been gracious enough with his time to provide some general information about VTOL configuration for the Volantex Ranger 2000 model I’m performing this conversion on. I have experience with RC planes, but never built a VTOL or used PX4/Ardupilot software. I’ll be leaning on this community for guidance throughout this build with software configuration required for PX4/Ardupilot.
I’ve had some of this HW sitting in boxes for a few years, life got in the way, it is time now to press on with this project. I’m a big proponent of buying quality and reliable components to begin with. It does not mean you can’t achieve the same results with your own build components. For those following, this is simply going to be a more modern guide and how-to.
This is my BOM (Bill of Material):
I listed a high power soldering station, it is assumed you have your own tools for general electrical work.
3D Printer - Bambu Lab A1 with 0.2mm Hotend & PETG filament ~$419
Arris Carbon Fiber Tube 16x14x500mm Gloss (2 Piece) made in Japan ~$27
16mm Motor 2212 Mounts x4 (aluminum alloy 15g) ~$25
Lumenier ELITE PRO III 2-6S BLHeli_32 4-in-1 ESC - 60A ~$94
JST-SH 1.0mm to 2.54mm Dupont Connector ~$20
APC Propeller with 1 spare set (B8x6EP qt2, B8x6E qt4) ~$24
12AWG Silicone Wire ESC (10ft) 500mm rod is ~10" per ESC need 4ft ~$16
3.5mm Bullet Connectors Female/Male 30 Pairs ~$10
M3 Screw M3x0.5 x 60mm specific for 3D Mount (Cut down as needed) ~$11
M3 Screw M3x0.5 x 30mm specific for 3D Mount (Cut down as needed) ~$7
M3 Nuts Slim 1.8mm x 5.5mm ~$8
SunnySky v3 x2212 1400KV Short Shaft x 4 ~$50
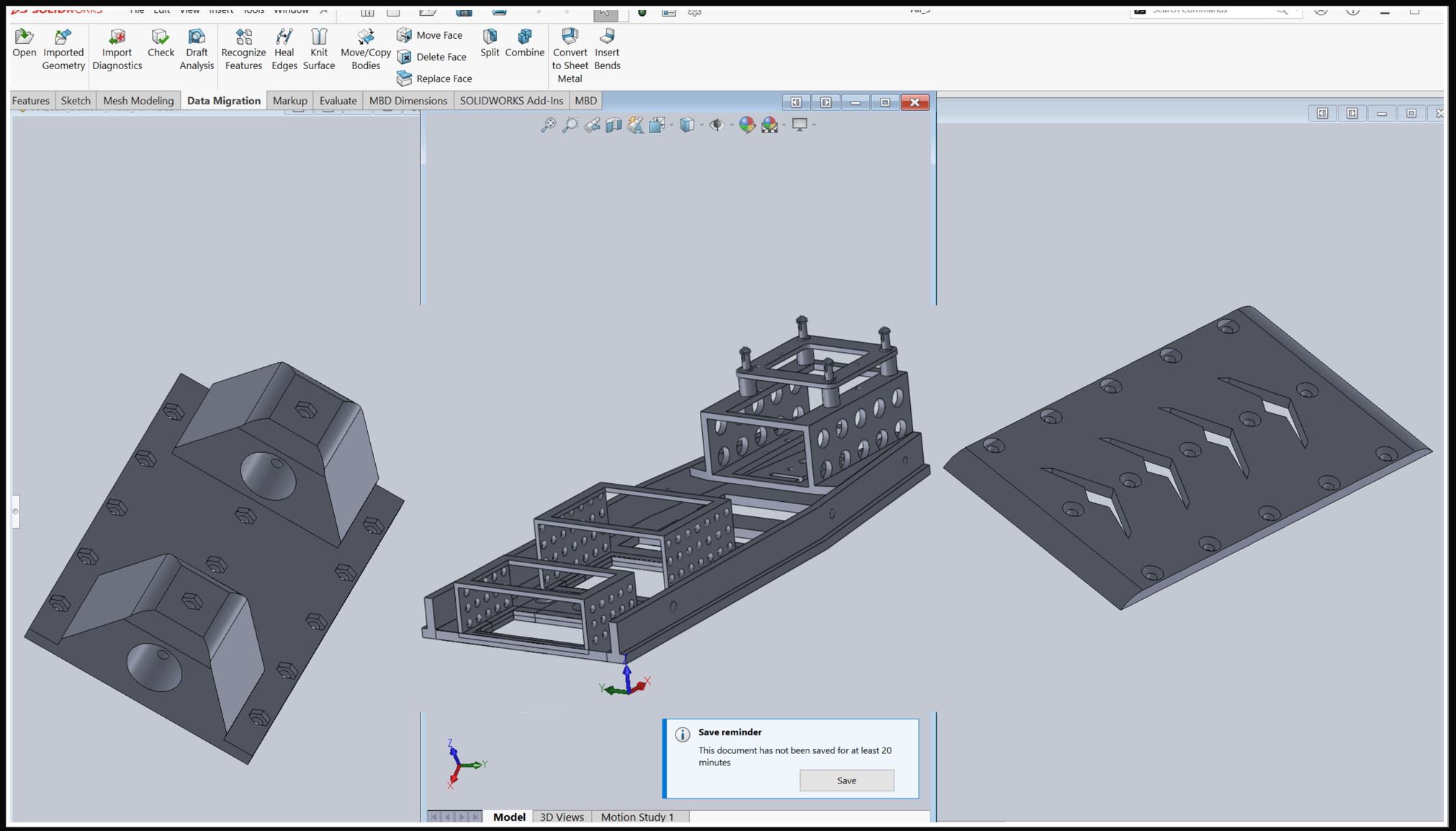
Custom Quad ESC Mount for Durandal, Hobbywing & Lumanier ESC, weight & CG focused design $0.00 (labor hours only)
Custom VTOL Mounts (Inspired by Thingyverse) designed with weight reduction in mind and minimal airfoil disruption $0.00 (labor hours only)
Hitec HS-55MG servo x6 for flaps too ~$160
Durandal Flight Controller & Airspeed sensor ~$330
Ners V2 + Led components ~$70
Dragonlink system 433Mhz ~$336
Battery 21700 Li-ion qt 20 ~$120
Battery Build components 101/110 Copper sheet 0.5mm + shrink + wiring + balance connector ~$50
Volantx Ranger 2000 ~$125
Hobbywing ESC 60A + programming card ~$60
SunnySky 2216 1400KV Long shaft ~$30
Misc Silicone wiring + connectors + hardware ~$80
Tools: FX-805 Hakko + 10mm chisel (For Soldering batteries, need high wattage iron for correct technique vs spot welding) ~$1,200.00
Hand tools, crimpers, wire strippers, etcKester rosin core solder
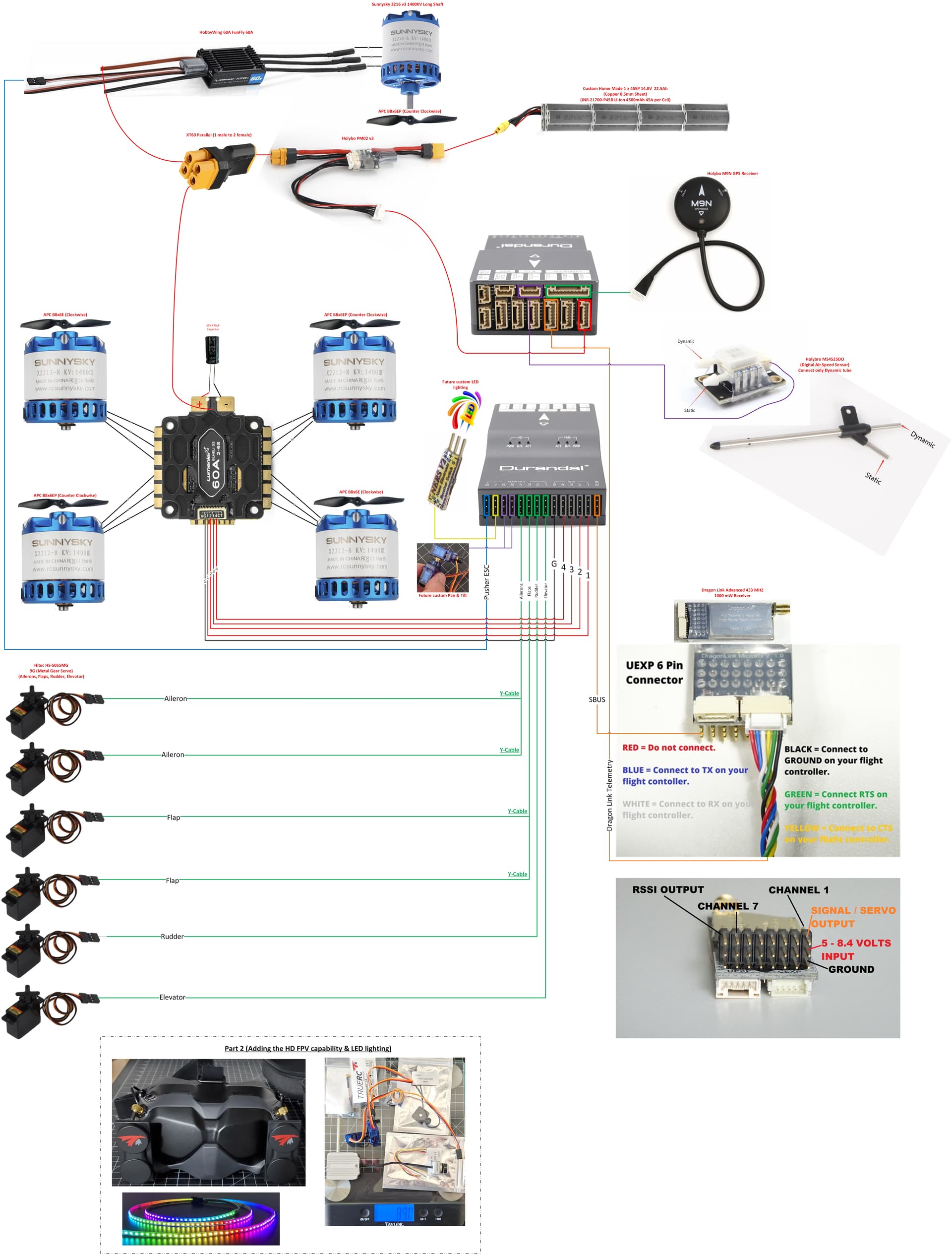
I’ll preface with the details of the wiring. I still need some confirmation for Dragonlink to Durandal, the older instructions on the DL website need validation. I believe what I listed is correct with the exception of RSSI on the wrong receiver pins, but the rest should be accurate.
I suspect I will be making more 3D models for mounting different hardware and the pan/tilt servo setup for the digital FPV camera. That is more of a phase 2 project. The existing 3D models I created will be released for download only after I have flight tested and feel confident in the design. I will not release it until it is fully tested so please be patient as these are home grown designs which might need some tweaking from what I’m sharing on this initial post.
I’ll do my best to answer questions and take as many pictures as possible for those planning to build an identical setup.
Cheers
A.F.

Courtesy of Rolly below:
