Hi everyone
i have some questions about vortex ring state that i couldn’t find answers by googling.
i know that VRS happen when we descending fast or air pressure under props goes near zero and we could survive from this state by cutting up forwarding air flow with propellers.
but some questions
does is it happen less to Hexa and Octocopters ? (because of more motors and power)
does is happen less with a Octox ? or this motor arrangement could make stronger VRS ?
could VRS flip a multi rotor ?
is motor KV could affect ?
Video 1: unstable flight control
Video 2: Looks like low battery
Video 3: unstable flight control
Or anything other than DJI phantoms.
VRS is a very specific aerodynamic condition that multirotor propellers fundermentaly does not support. Combine that with the 4 or more independent propellers destroying anything that resembles VRS that does form. Extremely unlikely to happen on a normal multi.
Descending into your own downwash, stalling your propellers, and a number of other effects that could be mistaken for VRS, sure.
i was created this topic because last week one of my quads started wobbling while fast descending without any lose of control , i was stopped it just by moving throttle stick to center
so it seems that it just descended to unstable air that generated by itself, is it right ?
note : copter was tuned and have may successful flight
Depending on the tune of the copter descending into your own prop wash is not as critical event as a traditional helicopter.
If your copter has lots of power and is sensitively tuned you might be able to flip it, but I have never observed that.
The biggest issue is power to get out of it.
If your descending fast and apply power it can take a lot longer than you expect to arrest its descent.
I have pancaked a few times doing this playing with a 450 size indestructible frame I make for the cattle musterers.
Golden rule, if you want to descend fast have some lateral motion as well.
since ppl might conclude from this thread that VRS doesnt occur in multirotors, here is what i think is a convincing demonstration that it in fact can happen in multirotors:
After the third time crashing (via hard landing) my own drone in similar fashion, i came across this thread and video. of course the design of your multirotor may make VRS more or less likely. in my case the rotors are relatively far apart, esp. longitudinally, which might make my quad more susceptible to vrs.
I think the main point is that while a Vortex Ring State can form on a traditional Helicopter it can’t really on a Multirotor so the effects on a multirotor attributed to a Vortex Ring State are actually something else. What’s a good buzzword for “descending into variable prop-wash”?
btw the poster of the video (which is 8 years old) thinks that this doesnt happen with newer drones but did not elaborate. any thoughts? maybe better-controlled descent rates? and/or more powerful motors?
Also an extremely poor description of ground effect…or any other aerodynamic effect he mentions, for that matter. He arrives at roughly correct conclusions via pretty crap reasoning.
@Leonardthall@Yuri_Rage im just focusing on his repeated, full-throttle descent demonstrations. the bouncing back up after touching the ground is exactly what i experienced.
Yes, it is also the least significant aspect of this problem.
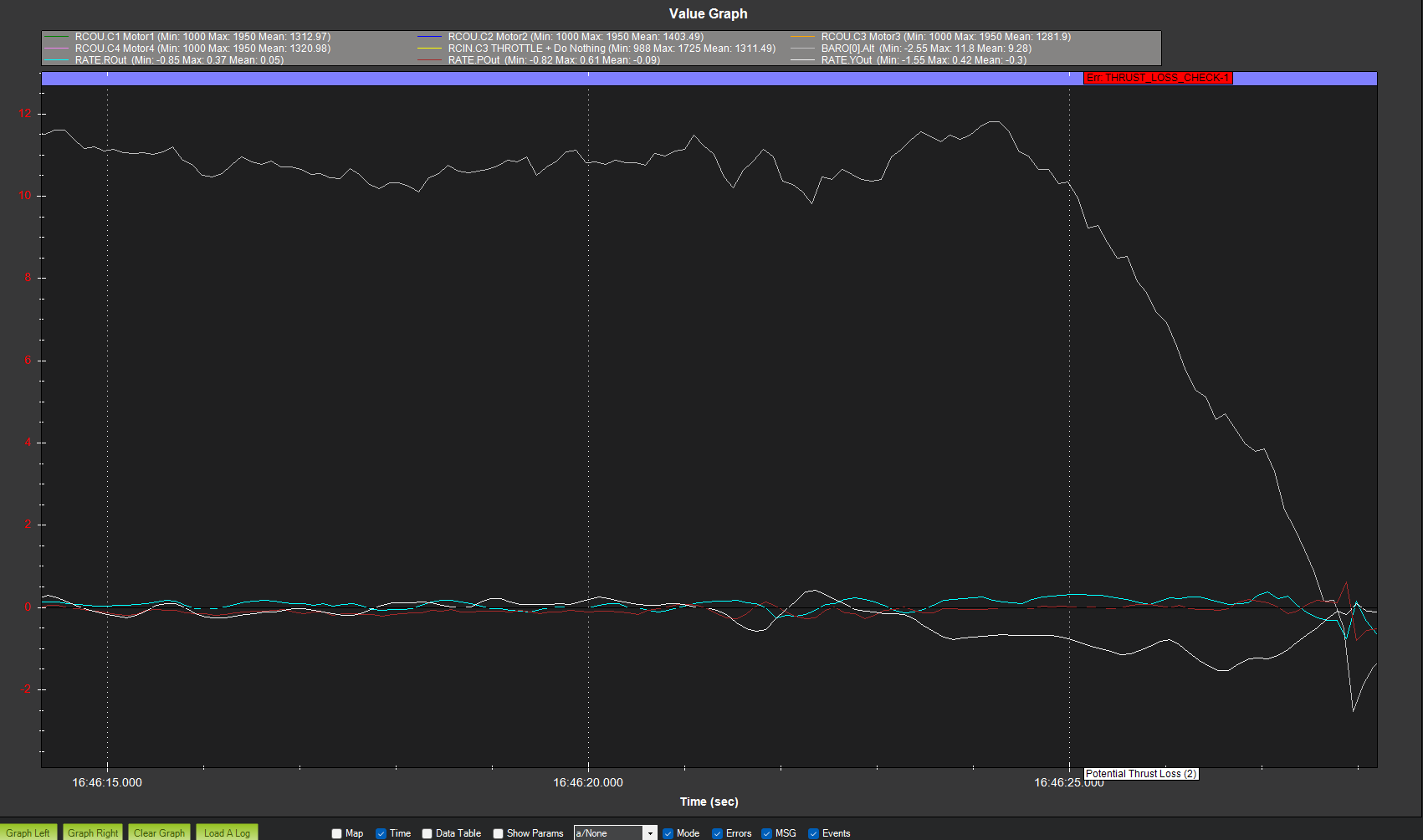
I would happy bet you a round of drinks that every one of your logs showing this problem also show control oscillation and an average throttle below that required to hover.