HI @bnsgeyer,
Am I being told by a heli dev that multirotors resemble helicopters in flight?  (in joke for those wondering)
(in joke for those wondering)
I think this depends on how relaxed the definition of VRS is. In the presentation you link to the definition is expanded to include any time you descending such that the outflow of the propellers is re-circulated through the propellers. We have lots of names for this such as descending into your own prop wash for example. Multirotors most certainly do get reduced thrust and more notably, increased turbulence and compromised attitude control.
I think it is convenient for researchers to relax this definition to help get some funding from all these flying cars we have now…
My understanding of a fully developed VRS is where two donut shaped vortex’s form on the helicopter disk. One circulates up outside the rotor disk and the other rotates up along the fuselage. Both have down flow in the outer portion of the disk.
Multirotor’s use fixed pitch propellers with increased cord and pitch as we get closer to the hub to maintain a consistent lift profile along the blade while helicopters carry most of their lift load on the outer portion of the blade.
- Yes a vortex could form on a multirotor propeller but only the outer one, not the inner one.
A helicopter has a relatively constant lift profile around the disk that facilitates the support of a full vortex ring that surrounds the disk. A normal multirotor configuration has independent, closely spaced disks. This means that any vortex that forms can’t surround a single propeller disk.
- Yes recirculation of propeller outwash can swirl up outside the multirotor combined disk area and be re-ingested resulting in significantly reduced thrust. However it must do so over multiple, independently actuated propellers.
So yes a standard multirotor propeller can support at lest the outer vortex ring. The combined effect of multiple propellers (especially an octo) placed in a ring could approximate a helicopter disk and theoretically be used to demonstrate a fully developed vortex ring state (an ugly one).
However as soon as any part of the vortex starts to form attitude control start so suffer and each disk starts to vary significantly. This variation destroys an chance of anything resembling the clean and powerful outer vortex I associate with VRS.
Take Home Point for Users: You are not suffering VRS, you have a problem with your tune, low battery, not enough thrust overhead, or didn’t realise you switched to land.
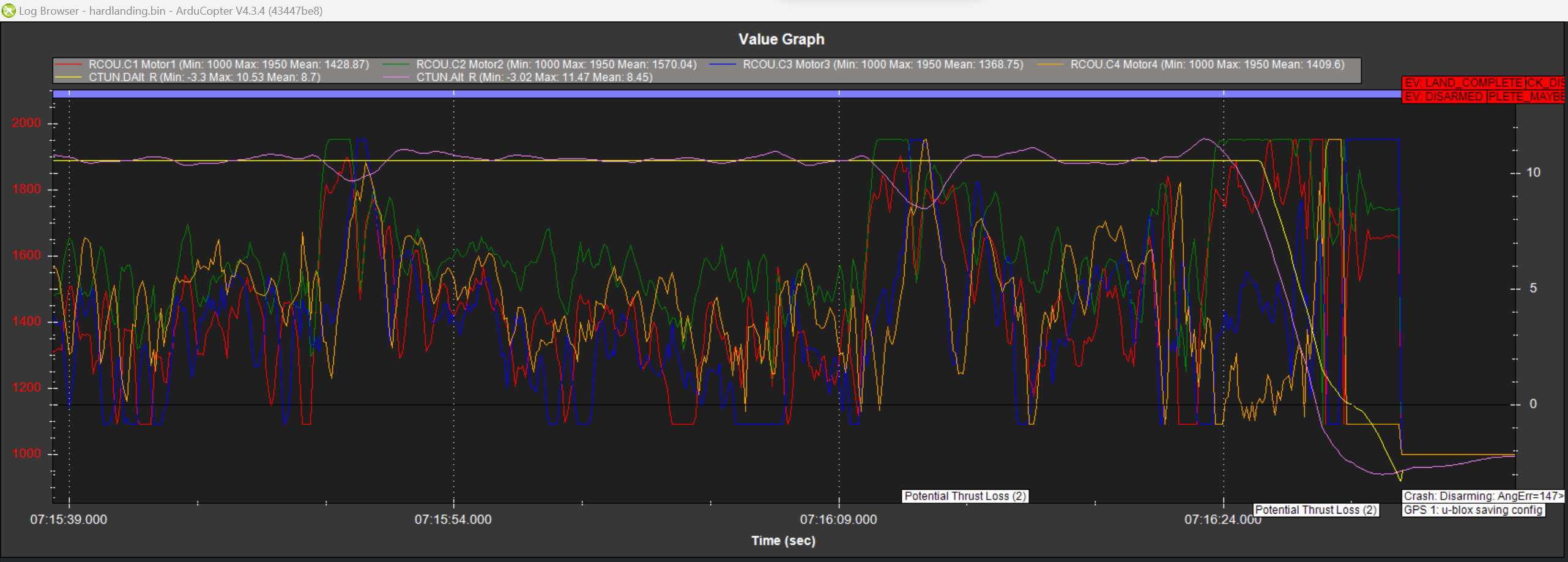
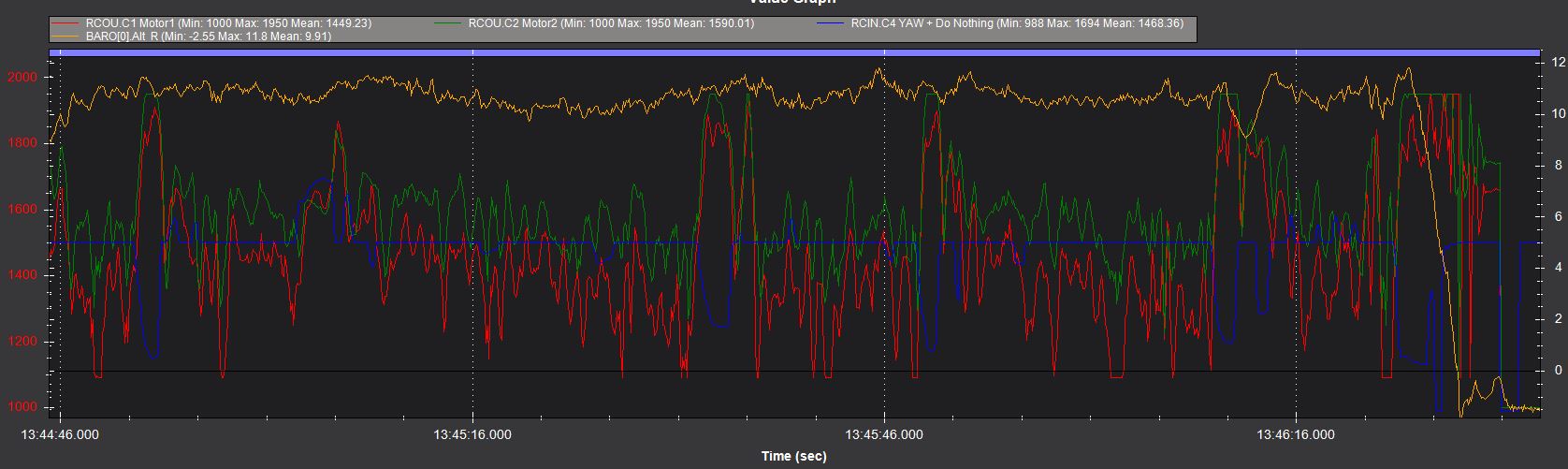
I look forward to seeing that first log showing a multirotor with all motors sitting over 85%, no battery issues, with an increasing decent rate immediately after being able to hover below 75% throttle.