I am using a Pixhawk Cube 2.1 on a F450 quad with 2212 920KV motors and 30Amp ESCs. The battery is a 5200mAH 25C 3S Lipo connected via the power module which came with the cube to it. I configured the power module to the ProfiCNC HV power module and it showed a voltage of 12.3V instead of 12.6V shown on my multimeter but was the closest to the actual value. But that is not the major problem. During flight it gave a voltage drop of about 7V, which, according to my experience, is just too much.
one or more battery cells are dead and under load just become high internal resistance (Should make a very hot battery
My suggestions:
With a known good battery:
Use a separate telemetry which measure and report to you each voltage cell while you’re flying. (Total voltage is completely meaningless!) Quanum or others…
Definitely do not fly with a problem of this kind! (restrain aircraft on ground while troubleshooting)
Use hall effect ammeter to measure current consumption under load. (If an ESC becomes shorted under load can consume large number of amps and create voltage sag.)
Thank you for the reply. I used a hall effect ammeter (clamp meter) and saw the motors drawing current as follows;
1A at No load (I have a Pixahwk, Raspberry Pi and Lidar V3 as well)
2.29A during Arming
15.5A at 15% Throttle
22.1A at 35%
27A at 50%
40.1A at 100% Throttle
According to the thrust table at full load each motors draw 10.27Amp. So 40Amp for a quad is okay. I used 1045 Slowfly props inverted and rotated them one place on the motors. The thrust was also okay.
I’ll get a new battery and report back.
Thank you for the help. Highly appreciate it.
So the problem wasn’t the battery. I tried with a brand new battery but using that, the voltage also dropped significantly. Changed the ProfiCNC power module to the 3DR Power Module and the drop was only 0.6-0.8V during flight, which is totally fine.
So I am quite certain that my power module was faulty.
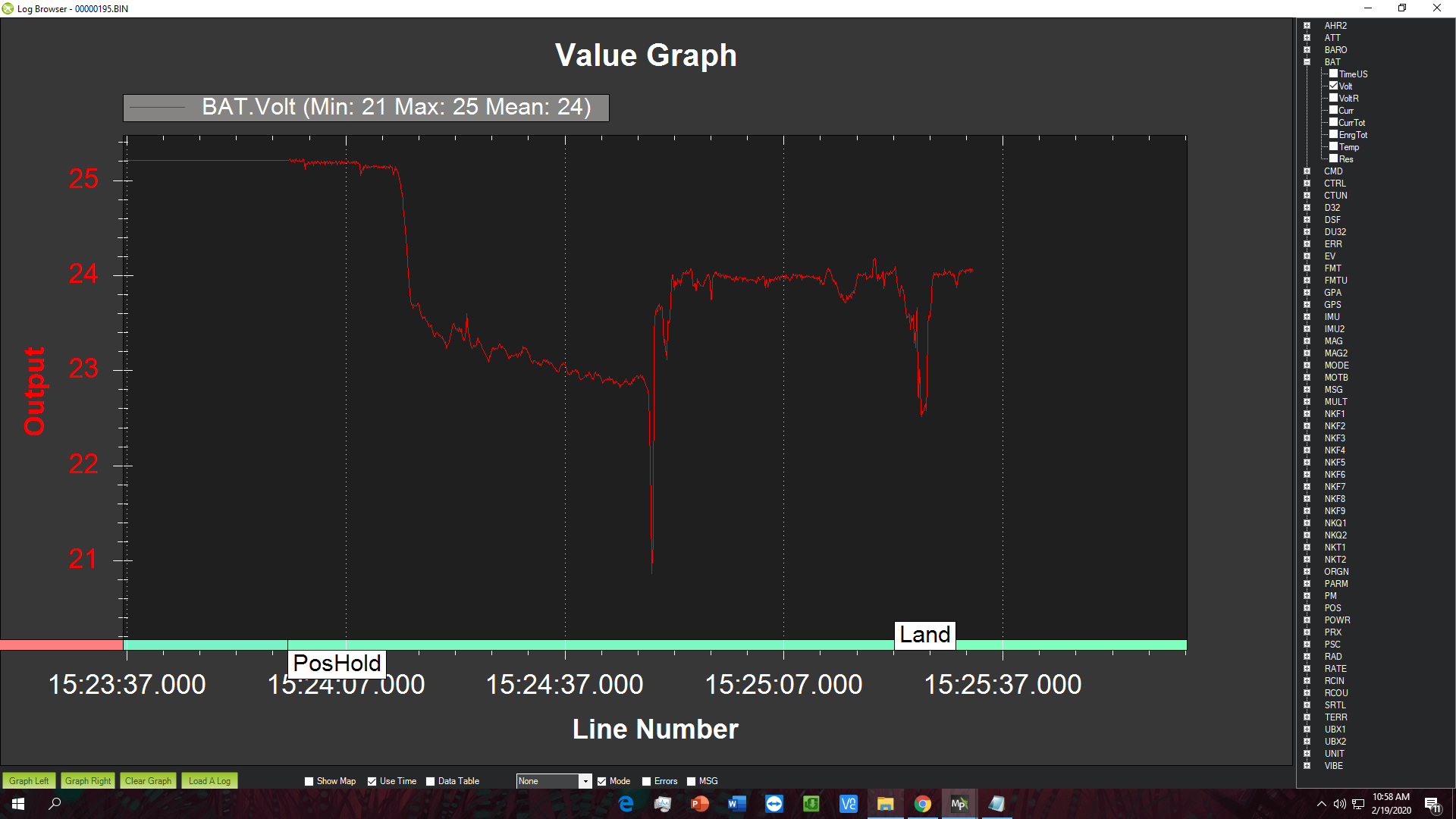
Hi @henrik04. Can the esc become shorted midflight. While flying my hexarotor there was a current spike and a voltage drop after which the drone flipped and crashed. I have attached the screenshot of the voltage
Motor 3 loses thrust (electrical fault?) and is commanded to full output, Motor 4 (opposite 3) is commanded to minimum thrust to compensate but it’s not enough to save the craft since there’s other issues, even though it’s a Hexa and could potentially still land OK without one motor.
Prior to the fault and crash, Motors 1, 3 and 6 (clockwise rotation) are working hard and motors 5, 4 and 2 are working much less (counter-clockwise rotation) indicating there’s a physical misalignment of the motors and/or frame. The Flight Controller is trying to correct this yaw because of this twist in the frame or motor mounts.
Motor 2 is usually at minimum thrust and Motor 1 is much nearer maximum thrust, indicating a weight imbalance left to right (roll).
Z axis vibrations are bit high - check the usual suspects: prop balance, wiring passing vibes to the FC, the FC mount. Z axis vibes will mostly affect altitude performance like althold, landing…
Your current sensing is not working, calibrated wrong. Probably also check the voltage calibration to be certain it is accurate. I highly recommend setting these:
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
You had one MOT_BAT_VOLT param set but not the other, that could be an issue.
What might be the reaons for this. While hovering the mot3/esc3 works fine but as soon as I start to climb motor3/esc3 failed
What other issues might be there. What are the requirements of the Hexa to land when a single motor fails. Is there something on arducopter I have to set. How does the FC identify when a motor has failed
I checked the motor mounts and they are perfectly aligned with the arms. But the frame was a bit bent due to a previous crash. Could this be an issue. How does a issue with the frame affect the yaw misalignment.
Also, what would be the reason for that voltage drop mid flight. Could it be an esc failing causing a higher current draw which leads to the voltage drop?
You will need to do tests to find out if it was the motor or the ESC, or even some physical fault like the prop slipping on the motor shaft, or even a bad solder joint.
For example, try moving the motor to a different arm and see if the fault stays with the ESC or the motor. It could be disastrous to test this with a real flight, so I’d suggest using the Compass/Motor calibration procedure to load up the system - read the instructions VERY CAREFULLY as it can be dangerous if you do this wrong.
I mentioned the issues I could see, others might be able to find more than me.
By default a Hexa should be flyable, or at least able to land, with loss of 1 motor without any special setting. Certainly good tuning would help with this.
Arducopter has these failure modes and actions built in - it’s a complex topic that’s a bit beyond me. Do some searches if you’re interested in more details.
A bent frame, even a little bit, can definitely affect yaw. One motor even slightly out of vertical alignment can cause a yaw effect, and then the flight controller has to use the other motors (torque) to counteract the unwanted yaw. This leaves limited headroom for the motors to maintain attitude and stability.
The unwanted yaw, combined with a weight imbalance leaves not enough authority to land your Hexa once you lose one motor.
Yes for sure that could be a reason, but I still feel you need to investigate your voltage and current monitoring to be sure that is working as planned. I couldn’t remember seeing a significant voltage drop half way through the log, only near the end when things go bad.
Summary:
Fix the frame and motor alignment so the FC doesn’t need to fight non-commanded yaw
Fix the weight distribution
Check and set those parameters I mentioned
Load test motors and ESCs for possible intermittent fault
After you think you’ve got everything sorted out, do some more hover tests and if all goes well do some gentle flying around, then we can check the new log files.
A voltage drop(sag) under load is normal. My experience is by about 0.7-0.4V. but could be abit higher or lower depending on your batteries C rating and health. If you want to reduce sag then you might need a higher C rating(usually means less internal resistance). However 7V is obviously absurd. For sure a faulty component or soldering somewhere increasing resistance in your circuit.