Hi, everyone. I’m using a stereo camera with IMU to do some vision works.
First, I use Ubuntu 16.04, ROS Kinetic
Following some great works in the forum I set some parameters as below:
AHRS_EKF_TYPE 2
EKF2_ENABLE 1
EKF3_ENABLE 0
GPS_TYPE 0
EK2_GPS_TYPE 3
COMPASS_USE 0
VISO_TYPE 0
timesync_rate: 0.0
and ensure the vision* is whitelisted in the apm_pluginlists.yaml since the vision_pose_estimate was loaded and initialized after I launched apm.launch.
In computer A, I did some SLAM work and remapped the vision estimate topic to /mavros/vision_pose/pose_cov
In computer B, terminal 1:
sim_vehicle.py --cosole --map
computer B, terminal 2:
roslaunch apm.launch
and there were some warnings:
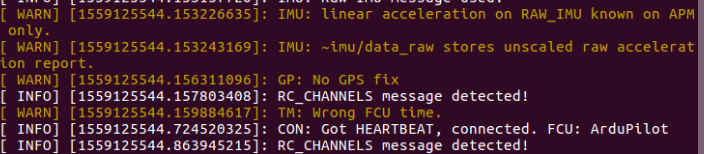
to ensure the mavros has recieved the vision estimation, in terminal 3:
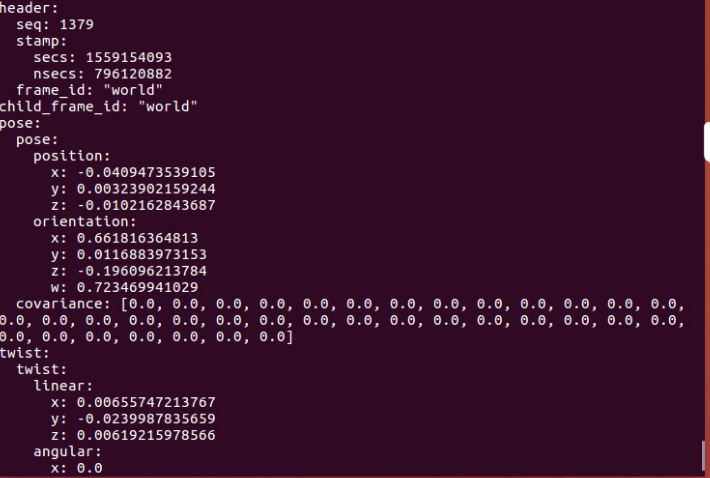
rostopic echo /mavros/vision_pose/pose_covand it showed as follow:
Then I tried to use QGC ANALYSE to see the VISION_POSITION_ESTIMATE, but couldn’t find it.
I also tried to arm the copter but nothing changed.
I don’t know what I did wrong or what important steps I missed