I just finished building an electric glider with ArduPlane. I am using a Mateksys H743-WLITE flight controller, a Radiomaster TX16S radio with EdgeTX and 2.4 GHz ELRS, and the Yaapu script to show telemetry on the radio (CRSF telemetry). I made the first flight with the plane a couple of days ago, on ArduPlane 4.4. It flies very well, got it tuned in perfectly. I have now updated to 4.5.
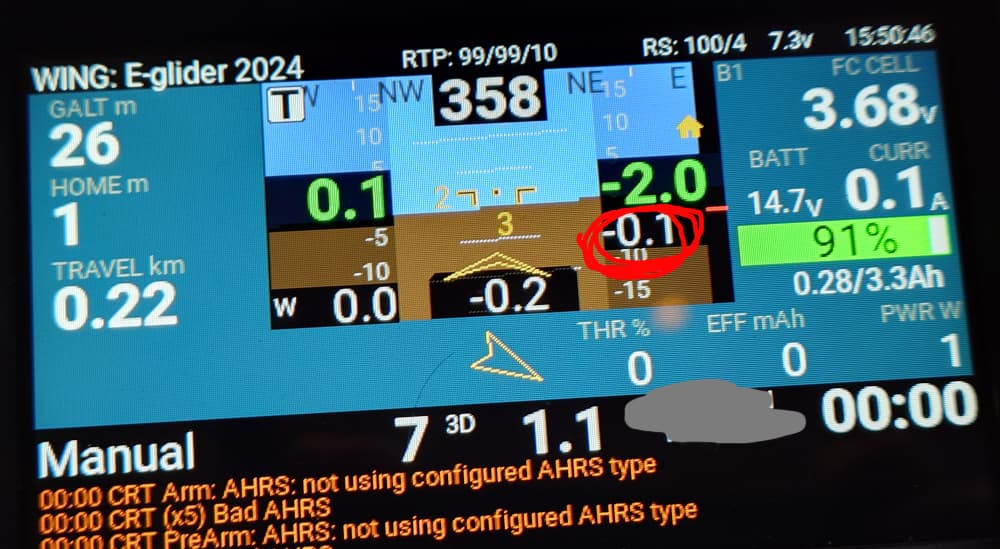
I am wondering if there is any way of getting the vertical speed to show up on the sensors tab like RxBt for example? It is usually called Vspd. The Yaapu script works perfectly. I see that I have the vertical speed data available on the main screen as a number. However, I want to use the audio-based variometer function in EdgeTX, therefore I need it as a separate “sensor”. Is this possible?
I intended to use my FrSky X10S Express EgdeTX 2.9.4, ExpressLRS 3.3.2 TX modul and RX and Kakute F7 mini FC.
I saw this here with that configuration. NO! yaapu installed on the TX.
Very interesting, what I had there. But as I could not get those barometer values Alt and VSpd back, maybe the Kakute is broken somehow and so I changed the FC to a SppedyBee F405 Mini. >>>>> Same situation!
I had the GPS values, voltage, current, yaw/pitch/roll live on the transmitter without yaapu!
One of the ‘experts’ told me, install yaapu and everything is fine. But what was happening there, no yaapu and those live values besides GPS on the transmitter? The AP documentation says, without yaapu you only see the GPS data on the TX! But I was seeing more!
ELRS does not seem to be the problem, as the ELRS protocol supports barometer Alt and VSpd!
As I am not going to fly that plane without having the barometer values as audio on my transmitter, I’ll step back to one of my old CC3D Revo Minis with old oXs telemetry. I know, that this will work.
Besides, today I found this post here …
If that is true, it is a real shame and a big disappointment. For those who fly planes like you and me, barometer values for Alt and VSpd are essential, GPS vales are slower and not so correct as needed.
I know the ELRS system is capable of Vspd. I have it working on other systems, INAV for example, and I also use a couple of Mateksys ELRS receivers with built-in variometer, that transmits baro-based Vspd and Altitude sensors to the radio.
It would be very good if ArduPlane could also exposed baro-based Vspd and Altitude sensors in the telemetry, as a compliment to the GPS data already available.
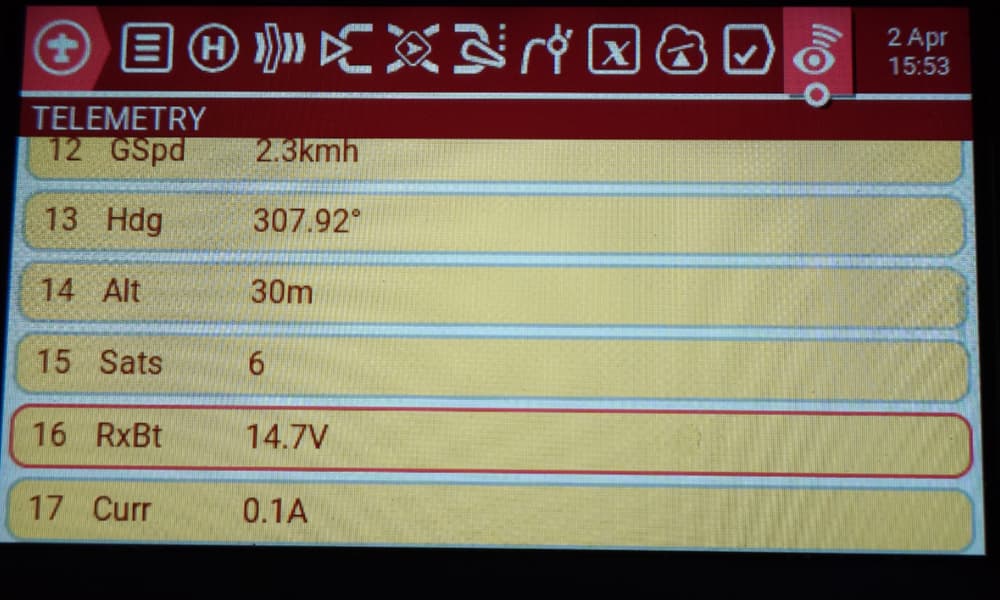
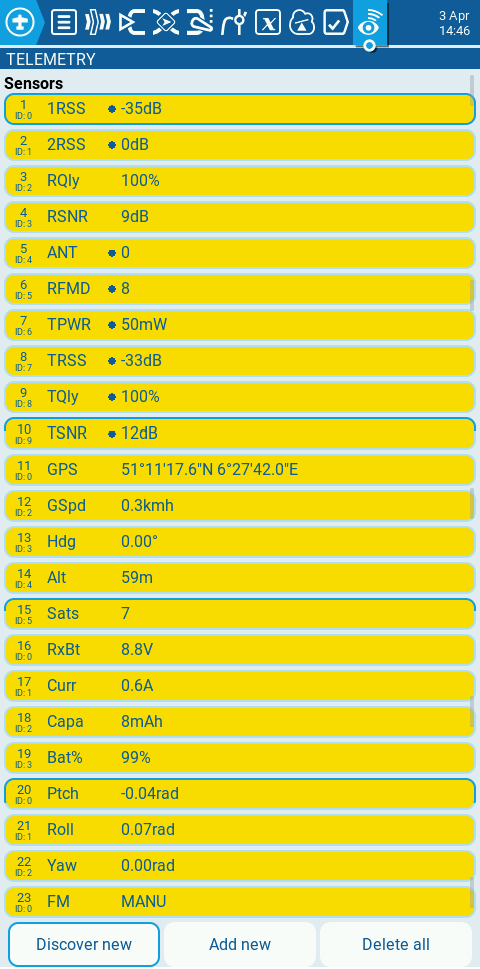
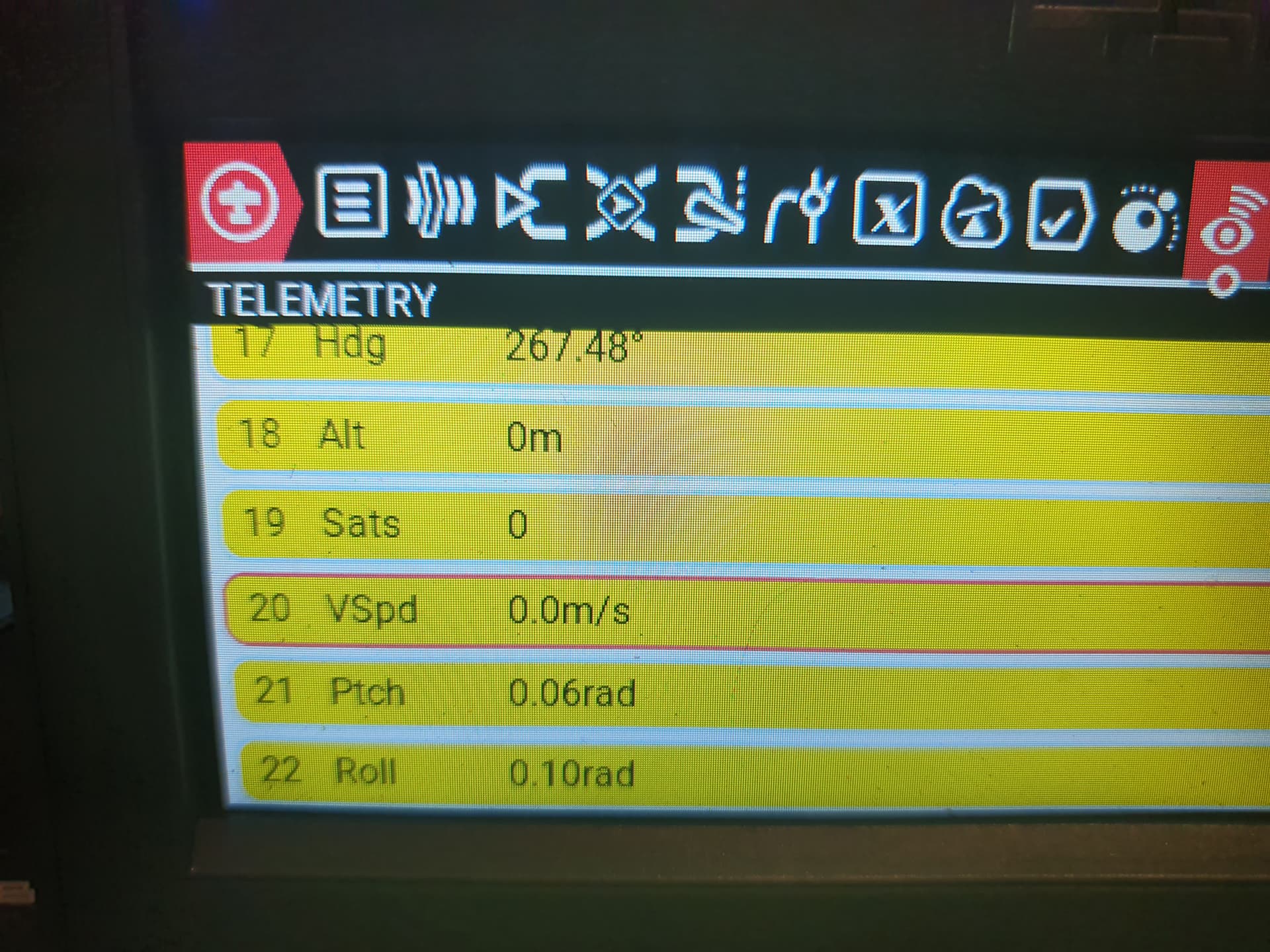
I only have 23 Sensors, Including the GPS-related ones, battery-related, Ptch, Roll, Yaw, Flight mode, and all the radio-related sensors directly from the ELRS receiver.
Does this mean I need to enable something in the ArduPilot firmware that I am not aware of to get more telemetry?
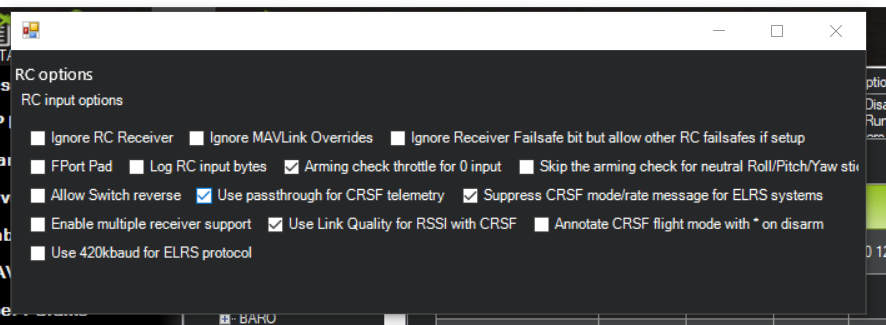
Looks the same for me, except that “Use 420kbaud …” is still activated. In any case, the additional sensors appear with “Use passthrough …”. Restart the FC once for this.
I tried enabling “Use 420kbaud for ELRS protocol” also. And rebooted with power cycle. It makes no difference in my case.
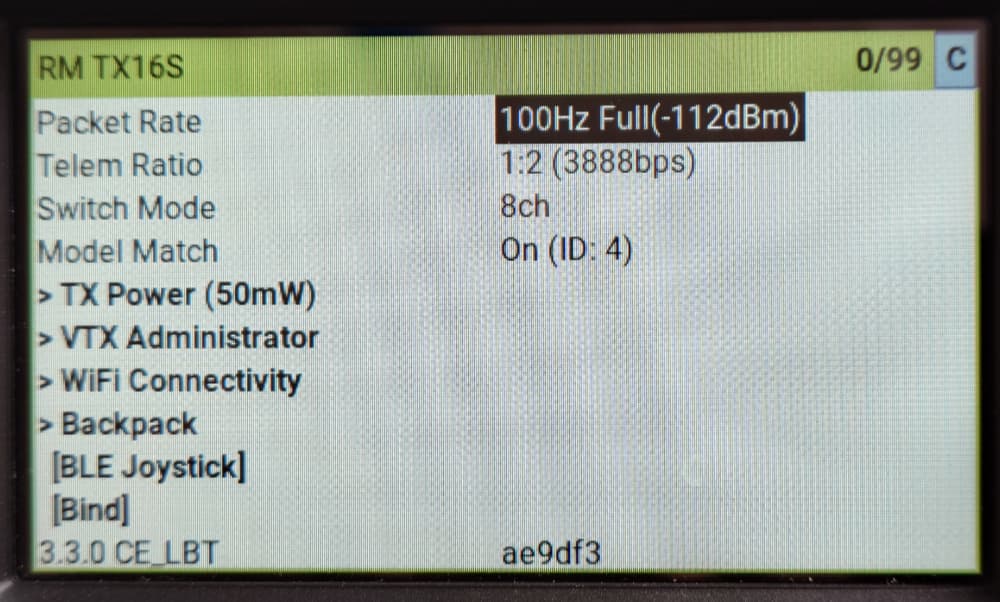
Here are my ELRS settings in the radio. I have the Radiomaster TX16S MK2 with internal ELRS. I use 100Hz full with 1:2 telem ratio to get a high bitrate on the telemetry.
Then we have to compare:
What version does your Yaapu script have?
I have Arduplane 4.4.4, you have 4.5.0
Why ERLS 3.3.0 if 3.3.2 is current?
I have set the switch mode to 16 ch/2.
It will probably only be due to the first two points. However, you could still upload your parameter file.
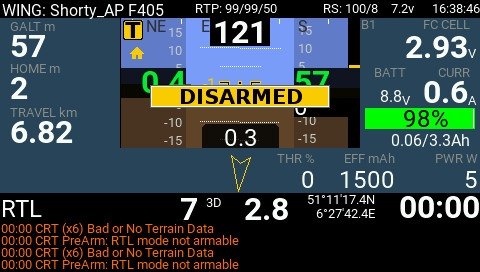
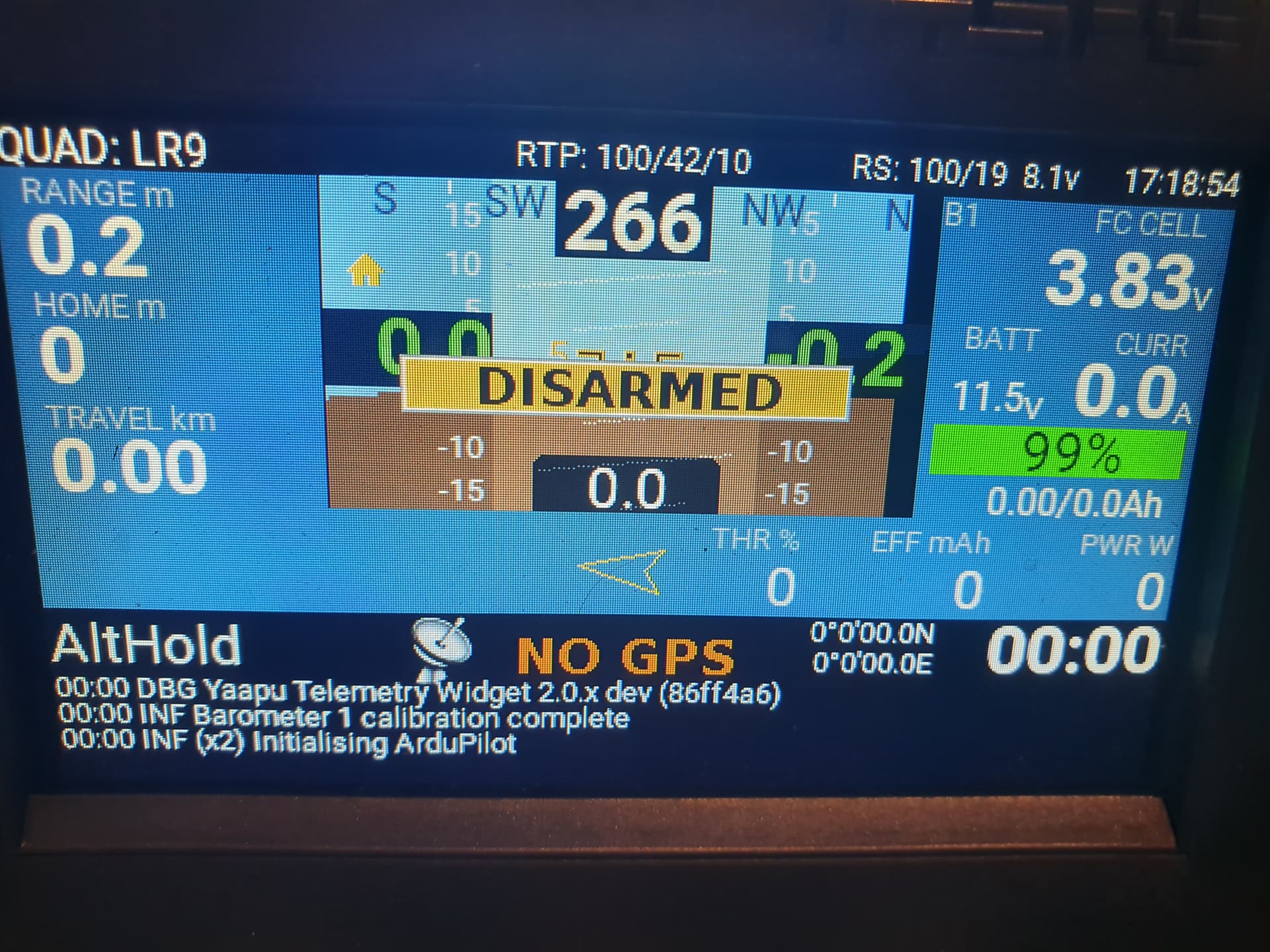
The first ten values are ELRS values and the other are the telemetry values of the FC. And all values are live! So if I change for example the Mode FM or RxBt, those values change. And I have an Alt value. 59! m
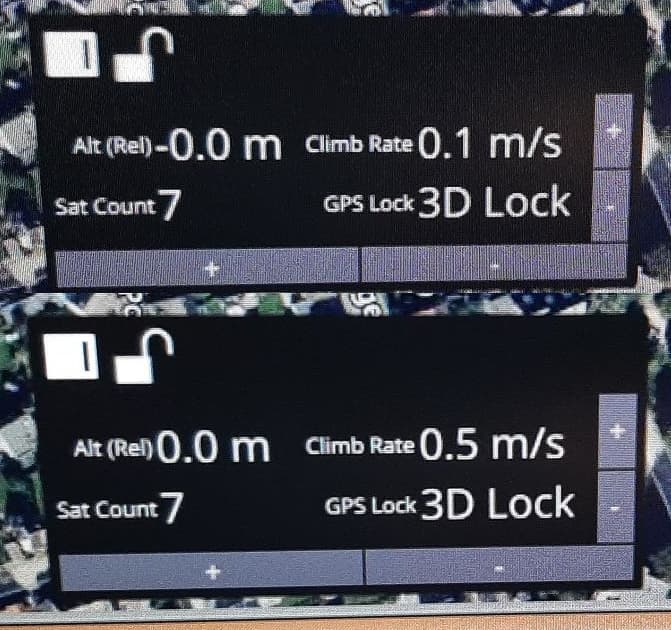
At the same time, I made those screenshots in the radio, I made two pictures of those values on QGrundcontrol. 4’ interval. That is Alt and VSpd barometer. And that is a good one - SPL-06!
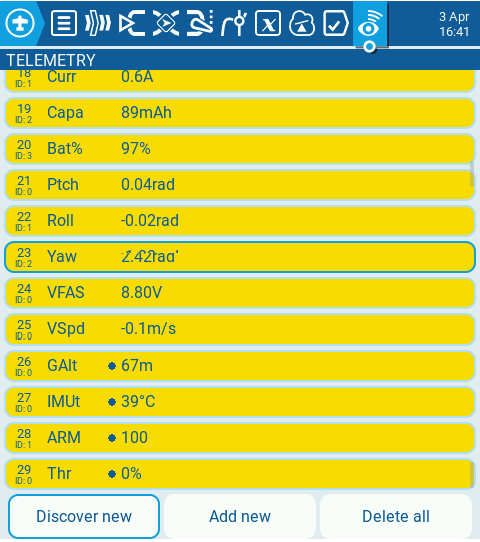
It is not about this screen, but the script must run so that the passthrough telemetry values are parsed. This is a packed telemetry format and without yaapu script only the standard values are available. There are a lot of them, but no VSpd …
What I see is a bit disappointing for flying a plane. Maybe nice for FPV, but not flying a little bit thermal. Especially as this FC comes with a rather precise barometer …
This seems to be true
With AP and ELRS
no baro altitude support in ardupilot,
Next step, change over from ELRS to FrSky. Have some of those Archer RS RX here. But what to use then in combination with the SpeedyBee F405 Wing Mini? S.Port/F.Port/FBUS? And I find the AP Wiki on that a little bit unclear … Hope it stays raining here
Why don’t you just open an issue like I did some time ago for FrSky? Plus a few users who support the issue. Nothing happens without you becoming active yourself … and that’s a good thing.
Reinhard, I don’t have a problem posting in github. Think, since 2016. Not much, but if I am busy with something, I’ll do!
Here with AP I am quite new and I am in a phase getting a feeling for mood and togetherness here.
But what I have experienced in the last few weeks, (guess you have seen my posts, Debian 12, Wiki documentation errors lately) is not an encouragement.
But I was able to help little bit.
Could supply one user in Italy with information on revo-mini sd and supply a tested firmware 4.4.4
And yesterday I found, that plane 4.5.0 now has the revo-mini sd firmware on download.
At the moment I am struggling with changing S.Port/F.Port/FBUS on FrSky Archer RX. And I would like to keep that F405 Wing and not to start with a second controller to supply barometer data, GPS, current and voltage.
It works for me using mLRS on frsky r9 since it’s generating the crsf telemetry from mavlink rather than just passing it though from the flight controller.
Nice, that are barometer values, not GPS data I assume?!
But this requires additional hardware.
At the moment I started to try out the FrSky way instead of ELRS. Hope this works then.
br Kalle
… but I keep, starting an issue in github on that point, in my mind. Getting that plane ready goes first.