I am kindly new to ardupilot/arducopter firmware. I have read all the discussion here but to be honest that I have no idea, already tried but does not help.
What I am trying to do is replacing/lowering the weight the compass yaw angle by heading angle from HDT message (NMEA).
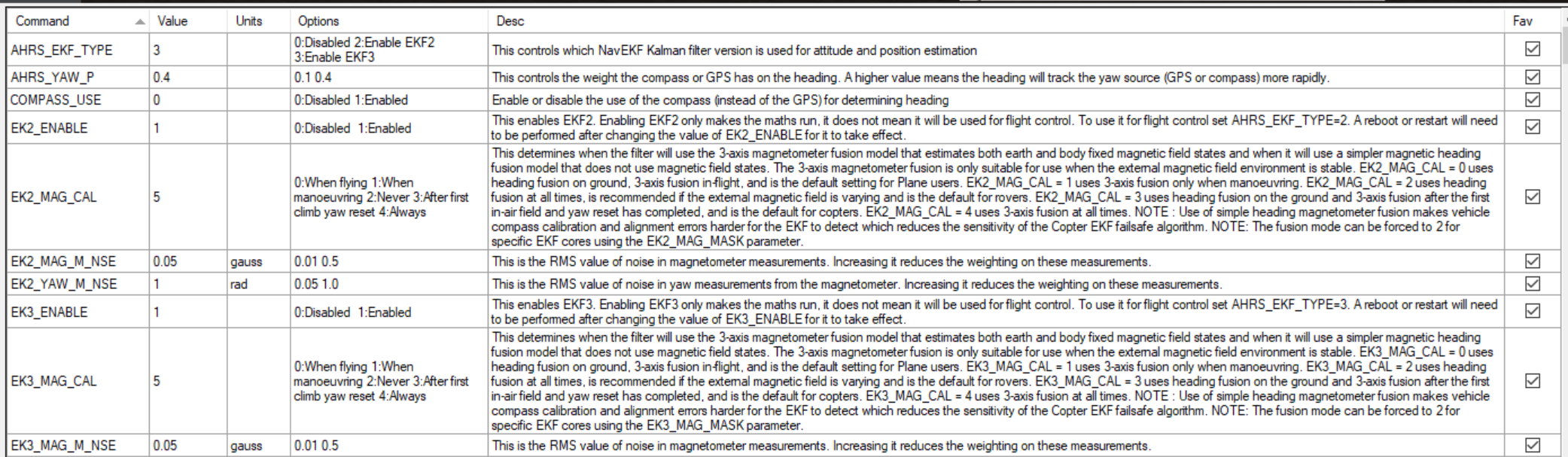
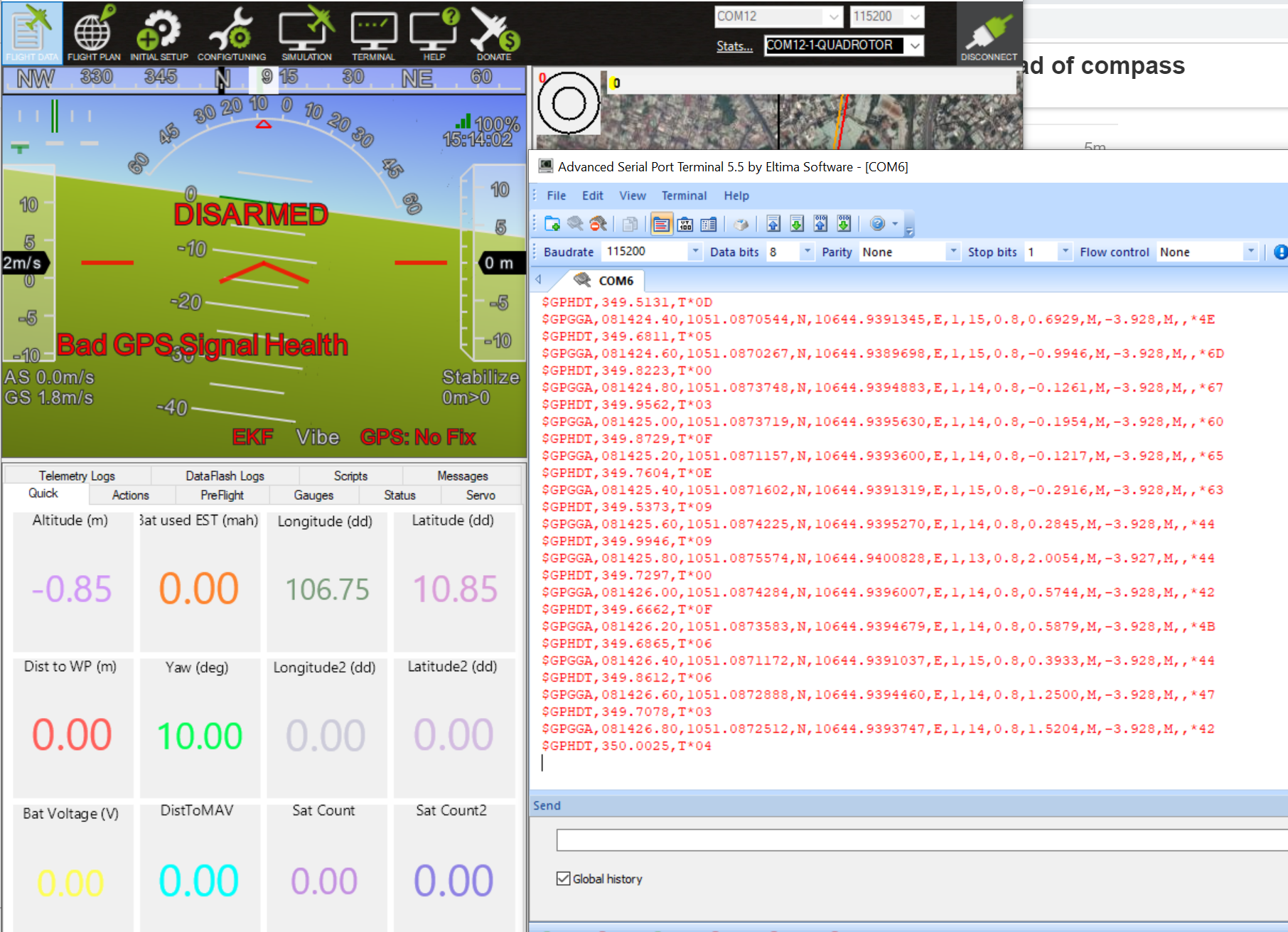
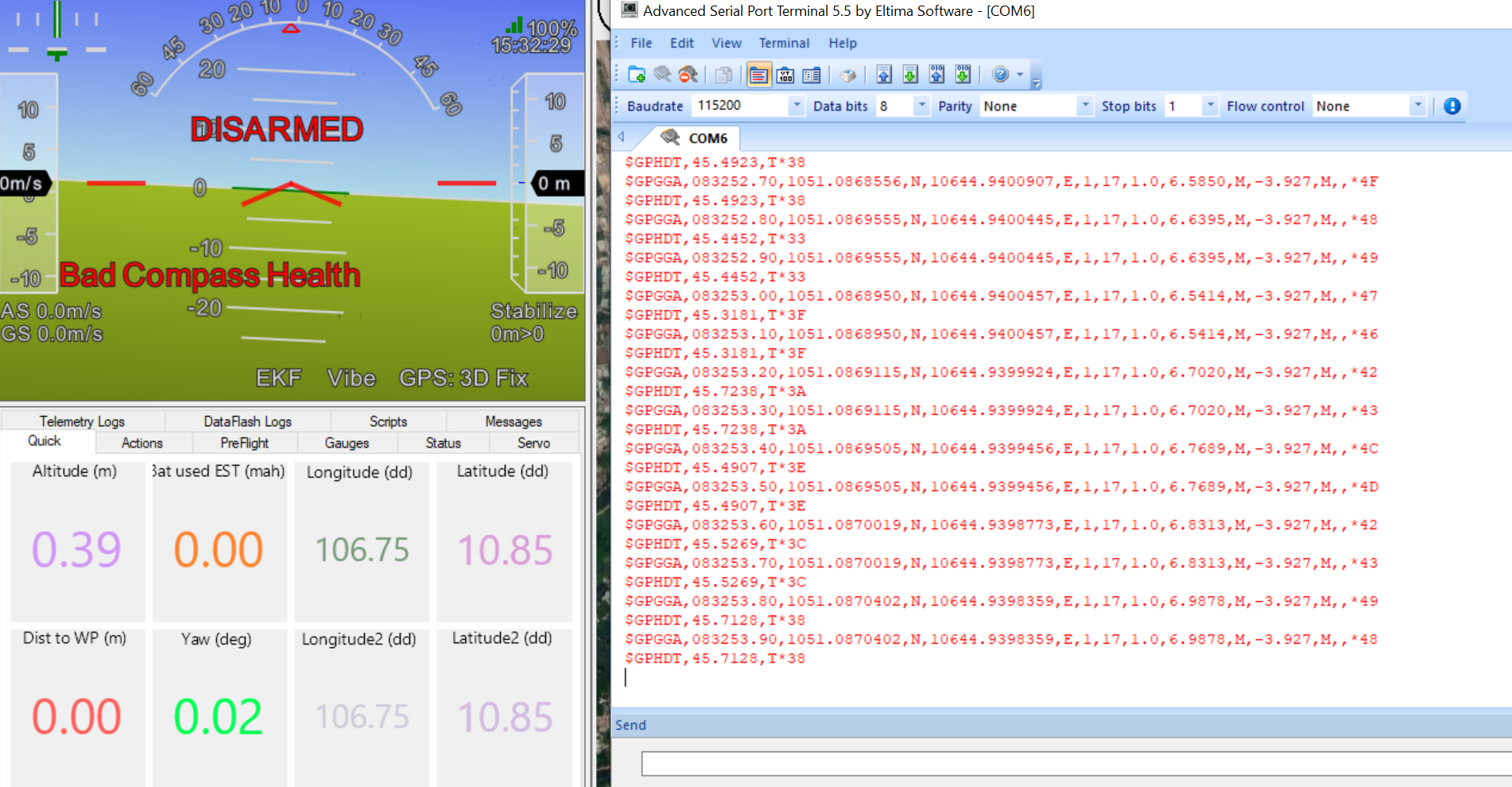
I have the GPS output GPGGA and GPHDT. Right now, GPS is read (readable long/lat in Mission planner status) but YAW is still drifting. GPHDT is fine when checked it standalone with terminal software . I disable COMPASS_USE, EK2_YAW_M_NSE, EK3_ENABLE are set, what else parameters do I miss?
You have previously said “GPHDT is fine when checked it standalone with terminal software” so I assumed you already had a terminal setup to look at the NMEA data.
I will check the log LOG_DISARMED later. However, I am facing another problem.
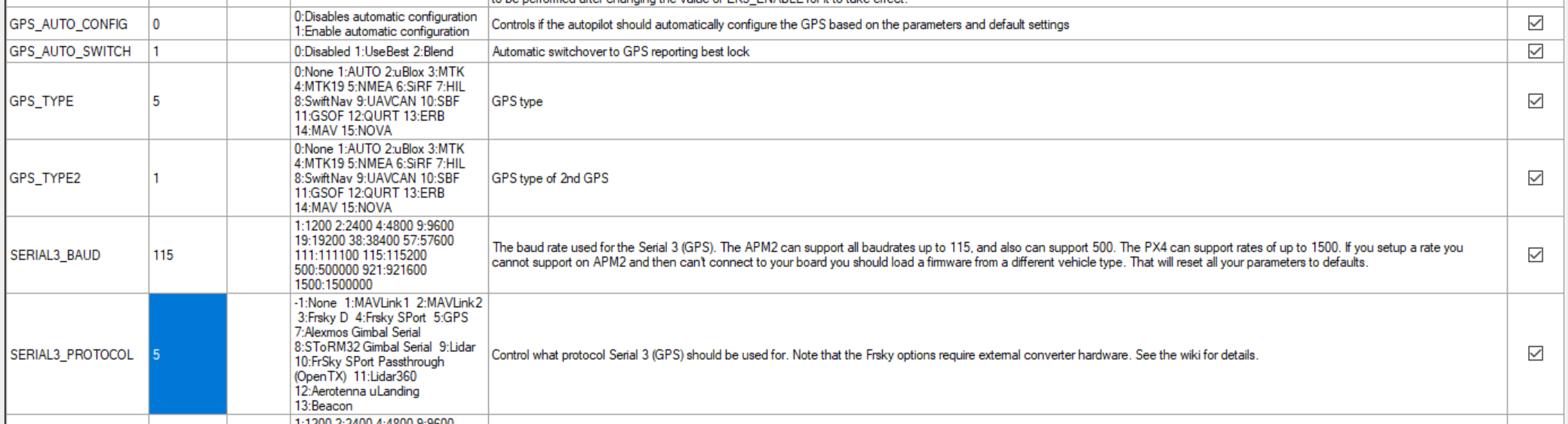
Everything seems to be ok when working with GPS NMEA at Serial 4, but when I change it to Serial 3 (the primary GPS) with the same setting on SERIAL3, it does not work. Ardupilot does not recognize the GPS NMEA from SERIAL3.
May I have you suggestion on this?
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
EKF primary changed:0
EKF primary changed:1
EKF primary changed:0
EKF primary changed:1
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
EKF2 IMU1 tilt alignment complete
EKF2 IMU0 tilt alignment complete
EKF2 IMU1 initial yaw alignment complete
EKF2 IMU0 initial yaw alignment complete
Frame: QUAD
CubeBlack 002B003C 34355108 38393730
ChibiOS: ab2f8d8d
ArduCopter V3.6.11 (f0d59294)