And here are HW IDs with both HERE modules connected:
As you can see, there are 2 external I2C devices now but identified as a different DEVTYPE each. If the GPS&Compass modules are jut the same hardware they should be identidied as the same DEVTYPE. Should’nt they ? Could this difference in detection be an issue ?
2¡ SOLVED !
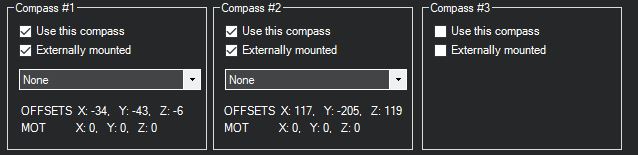
It is safe to enable the 2 externaly mounted compasses or is better use 1 external and the second from Cube Black internal SPI compasses ?
Why once both compasses are calibrated the OFFSET are so different if the orientation in the frame is the same for both modules ?
3
GPS lock times are quite different from one of the units to the other. The unit i’ve just added connected to GPS2 seems not to be booting in HOT mode. This 2nd unit needs several minutes to get a similar number of satellites and hdop values than the faster unit that gets a GPS lock in a few seconds. It goes worse as time that modules are powered off gets higher. Could it be caused by a dead battery in the slower module ?
4¡ SOLVED !
I’ve been told throught answers in previous topics that NO more than 2 satellites constellations (plus SBAS) must be enabled using bitmask in GPS_GNSS_MODE due to M8N timing related known issues. It is safe to setup different GPS_GNSS_MODE values for both units ? I.E. Unit 1 using GPS+GLONASS+SBAS (GPS_GNSS_MODE = 67) and unit 2 using GPS+GALILEO+SBAS (GPS_GNSS_MODE = 71). Should it be reliable in a BLEND configuration ?
I think it picks up the internal compasses. Try loading only the driver of your external device trough dedicated bitmask and connect the 2 external compasses to 2 different i2c bus to avoid same id on same bus.
It seems that external compasses are detected as I2C connected and (to bus 0 and 1). I’m assuming that GPS1 is connected to one I2C bus and GPS2 to the other one (please correct me if i’m wrong).
First time i went to compass calibration in Mission Planner after connecting the 2nd HERE the 2d compass was already configured as “externally mounted”.
My only doubt about compasses at this point is why they are detected as different devtype (DEVTYPE_AK09916 one and DEVTYPE_HMC5883 the other) and wich compass setup is more reliable, external+external or external+internal.
regarding question #4:
You can set different GNSS mode and blending will work, however I can’t say if that’s necessarily a good idea. I know the blending can produce bad results if one GPS is giving weird readings, but I don’t know how different the fix solutions might be or whether the blending will handle it gracefully.