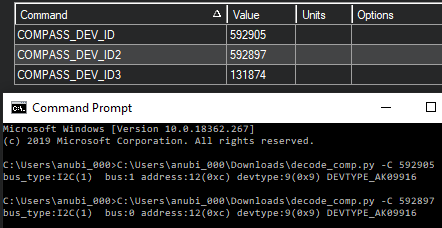
And here are HW IDs with both HERE modules connected:
As you can see now are 2 I2C devices but identified as a different DEVTYPE each. If the GPS&Compass modules are jut the same hardware they should be identidied as the same DEVTYPE. Should’nt they ?
It is safe to enable the 2 externaly mounted compasses or is better use 1 external and the second from Cube Black internal SPI compasses ?
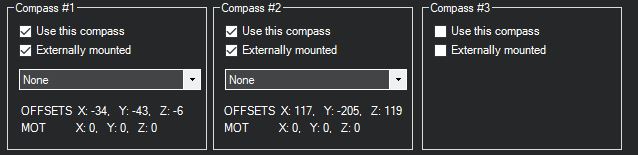
Why once both compasses are calibrated the OFFSET are so different if the orientation is the same for both modules?
The actual value of the offsets are way less critical than the variation of the magnetometer measurements in flight. The largest source of variation is likely interference from the power distribution.
See here for the Compass-Mot test to measure mag variation:
Be advised that this test requires the props to spin for motor load. You will remove you props, flip them upside down, and rotate them one motor position. Motors will spin.
I personally have offsets in the 2-300 range on my Here2 unit. Compass-Mot test resulted in <10% interference.
Thanks again.
Should i be worried about compasses been identified with different DEVTYPE when it’s supposed they must be the same as they are identical modules ?
Ill be honest, this is starting to reach the limit of my knowledge of the hardware.
From what I can tell, it looks like Hex/ProfiCNC had changed the mag sensor spec at some point and you have 2 different magnetometer sensors in each of your Here modules. Although I will admit i was not aware of it.
maybe @proficnc can address any concerns about different mag chips?
BMI160 is a Bosch chip:
and HMC5883 is a Honeywell chip:
I dont think this should be of any concern. It looks like arducopter properly identified each chip.
Do a little sanity check - does the copter show as pointing North in Mission Planner when oriented north? You can check this in the HUD and/or in the map display. Does it rotate the correct direction in mission planner when you physically turn the copter? Both ways?
Yeah, the sensors on the HERE were changed at some point. The Honeywell HMC chip was EoL, so it was replaced with AK09916 (actually, it was replaced with ICM20948, which includes AK09916 in it). HERE2 continues to use this chip, although it’s actually connected to a STM32F3 controller, which emulates its I2C interface.
The LSM303D is one of the internal mags.
I’m honestly not sure what happens if you plug in 2 HEREs that use the same device type (eg, two AK09916s), but since you have two different devices, you should be good to go. I actually happen to fly a similar setup: a HERE2 and a late model HERE, so my compasses appear as ICM20948 and AK09916.
Yes, HUD on Mission Planner points North correctly when frame nose is oriented to North. In the end is a good new to have 2 different mag chips cause address conflicts are totally avoided.
I just remembered: GPS1 and GPS2 ports actually use two different I2C buses, which means there won’t be a conflict even if you have two identical devices. I just tested this with two HERE2s.