Hello, I am currently tuning a moderately large 1300mm motor to motor hexa equipped with T-Motor 6007-X 320KV and 22x11 props. I do not have RPM feedback.
The flight controller is a Pixhawk Cube Orange, mounted a bit forward of centre on the double sided foam that comes with it.
I am following the instructions for In-Flight FFT Based Harmonic Notch Setup and have performed an initial flight as mentioned here.
The dataflash log for this flight is here.
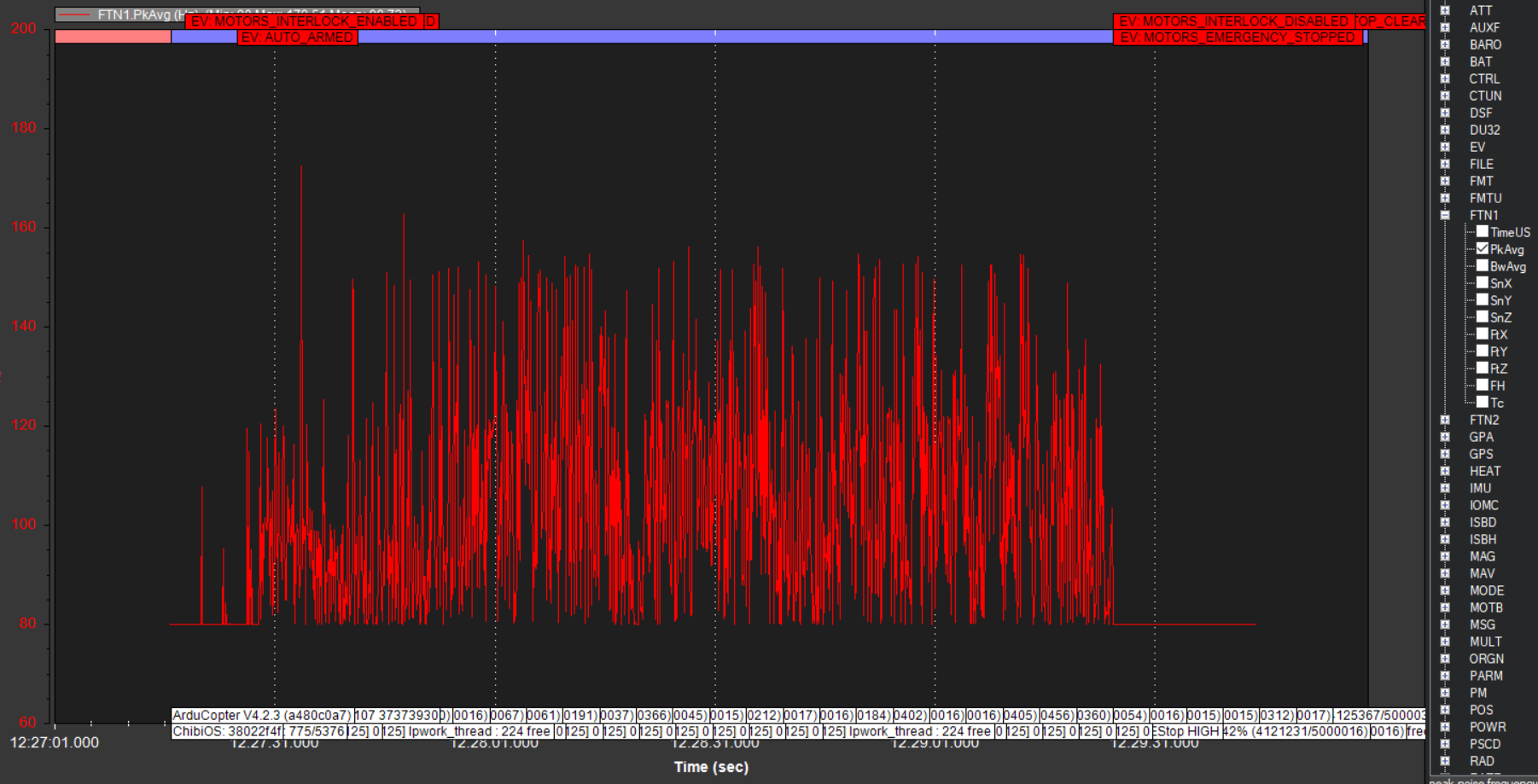
My problem is that plotting FTN1.PkAvg in MP shows no clear dominant frequency:
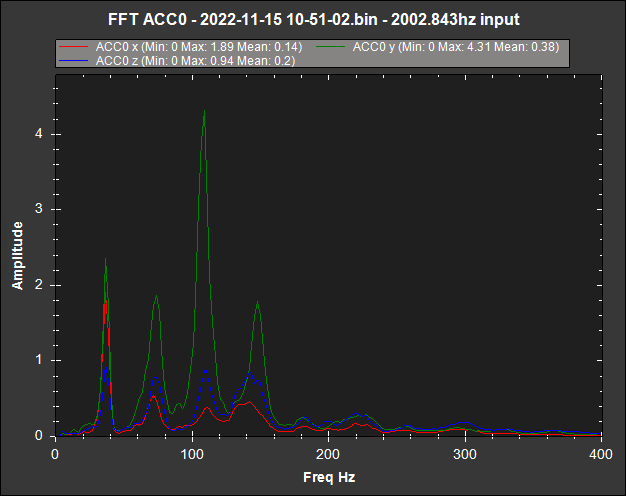
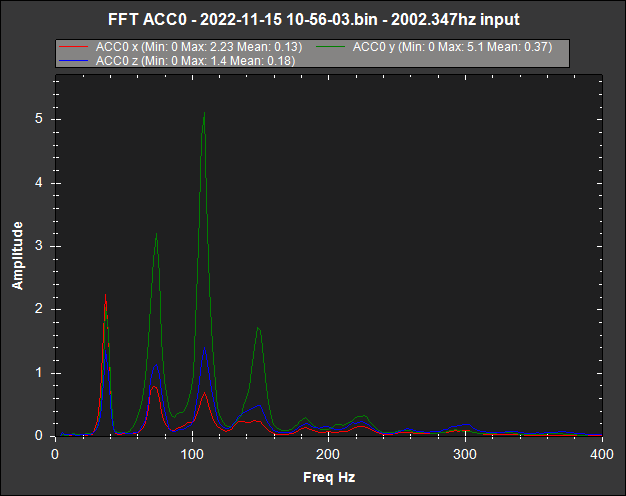
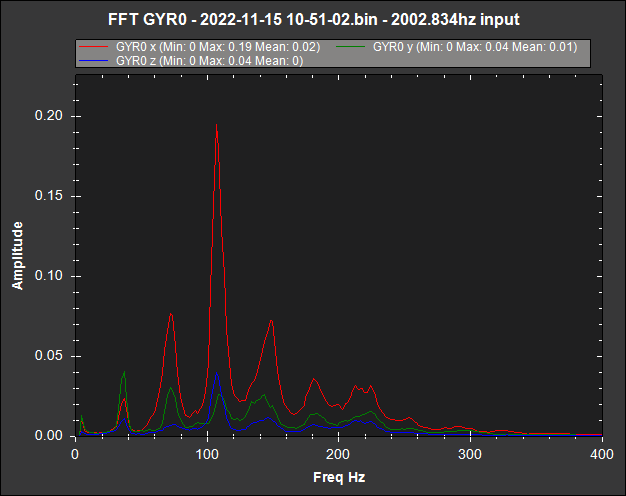
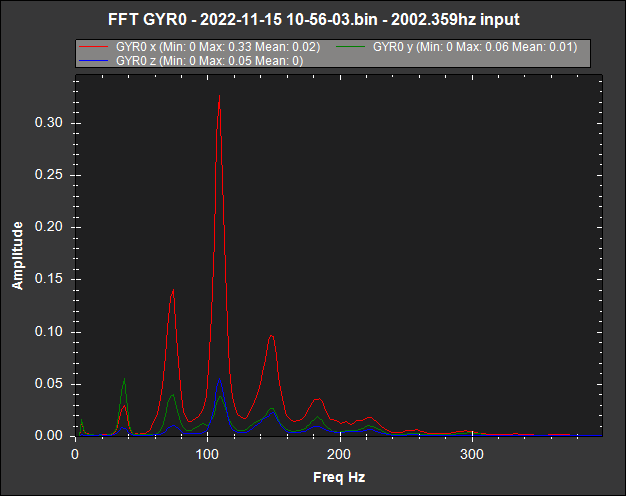
Also, getting Mission Planner to perform an FFT according to the batch sampler documentation gives a fairly spread out picture:
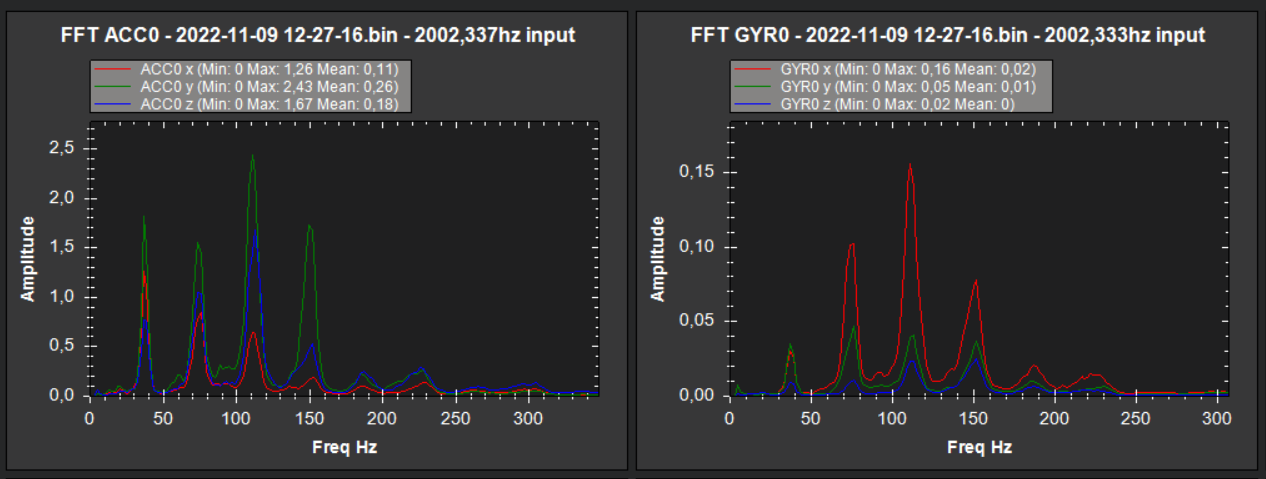
The peaks in the accels and gyros are 37, 74, 111, 150 Hz.
However, except for the fairly obvious 111Hz peak, the second biggest is debatable, accels say it’s 37 Hz, gyros say it’s 76 Hz.
Having said all that, the vehicle flies like a dream with default params, to the point where I wonder if I should bother with vibration filtering (or even tuning) at all. I wonder if the reason I am not getting very strong results is that vibrations are too low anyway.
So, does anyone have any tips? Should I bother with vibration filtering at all? If I do, should I go for throttle based or In-Flight FFT?
Thanks.