Hello,
This our 24 kg quadcopter without payload. I have made all calibrations except autotune. İt’s quite good tuned in stablize and althold modes. The problem is when we try take off or loiter modes it makes this wobbly movement. M9N GPS status are 28 sat. and status 4. I thought it’s about compass calibration according to datalog and made iron calibration and it got better but not enough. You will see in the video after the take off we changed to althold and it’s hanging in the air directly.
Thanks for the reply.
I applied this guide you posted step by step.
IMU temp calibration
IMU And GPS orientation
ESC Calibration
Initial Tune according to drone
Simple accel calibration
Compass iron calibration done after first guided take off
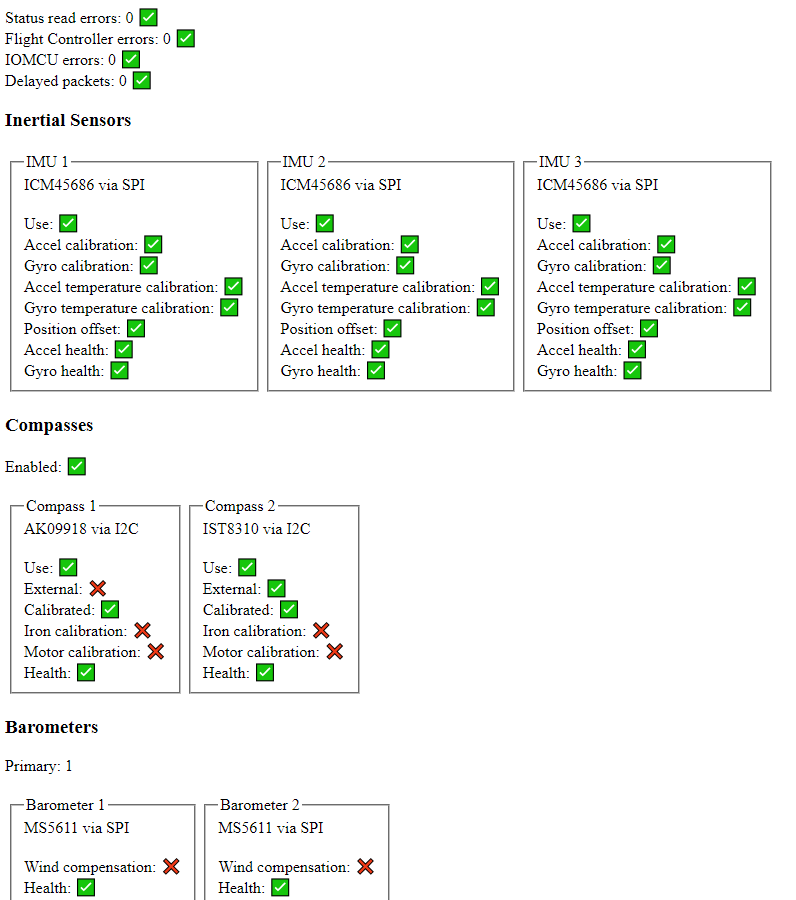
Hardware report
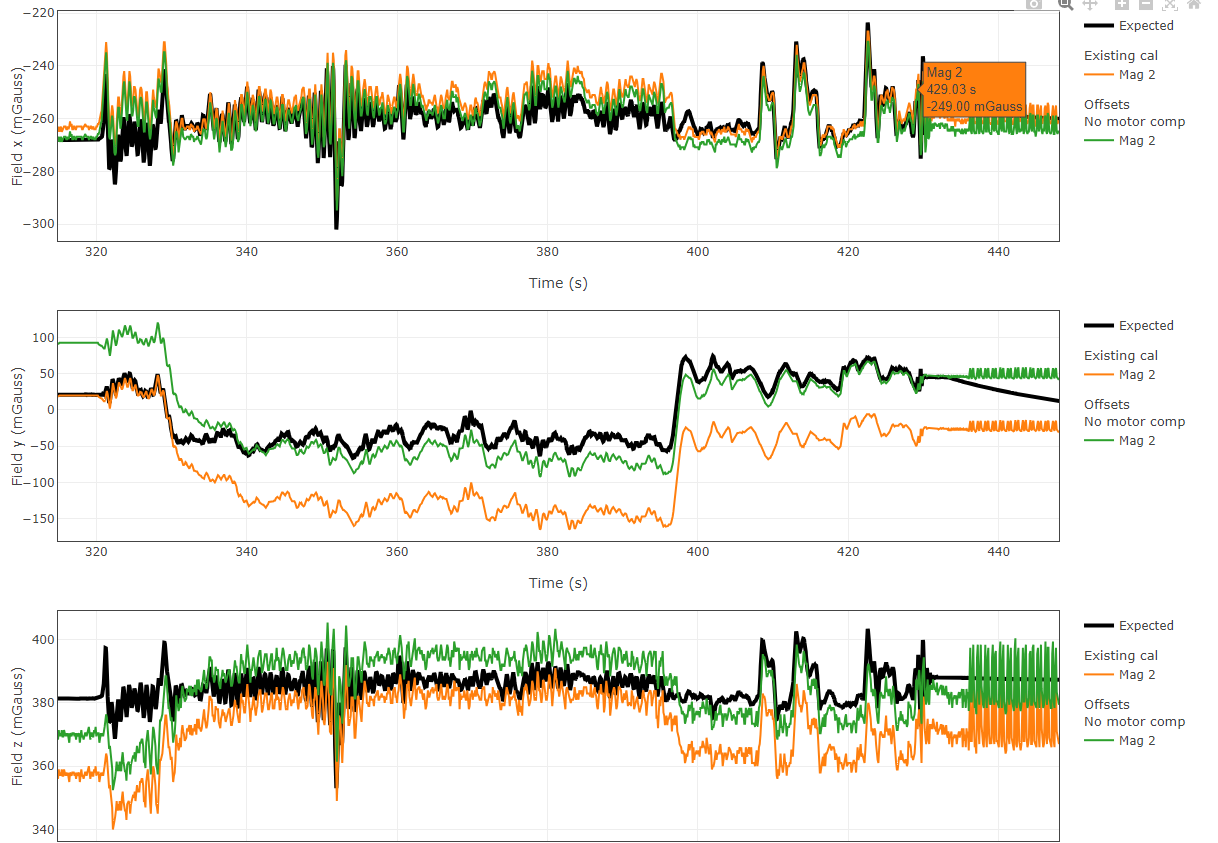
Last step for me was magfit. Before doing the script we wanted to take off in guided but it appeared we have problems in guided mod. I’m not sure what parameters to check when the problem is in only guided mode.
Hello again. I can’t get a visa soon but thanks for the invite.
I have made a few changes and corrected some mistakes. There is definitly a problem with the compasses. I disabled orange cubes compass and fixed GPS Compass 45 degress (yaw270) cause magfit tool shows 45 degree even the gps looking forward and it got better.
We suppose found the main problem. Inaccurate gps position causing the quad to going that direction and powerful motors reasoning overcorrecting itself.
I lowerd PSC_POSXY PID parameters to reduce that overreaction and it’s stable right now.
The problem to solve right now is 1m accurisy so travelling 1m radius around even we have 30 sattelites, 0.5 HDOP GPS and 16 sat 0.9 HDOP RTK FIX.