Hello,
In recent flights, I noticed that the VTOL motors on my quad plane are activating during fixed-wing flight. I am flying on Arudplane 4.2.3 (but now definitely looking at upgrading!) At first, I thought this was a normal Q_Assist, but reviewing the logs, I discovered this was not the case.
For context, the relevant parameters are:
Q_ASSIST_ALT = 0 (not activated)
Q_ASSIST_ANGLE = 45 degrees
Q_ASSIST_DELAY = 0.2 seconds
Q_ASSIST_SPEED = 12 m/s
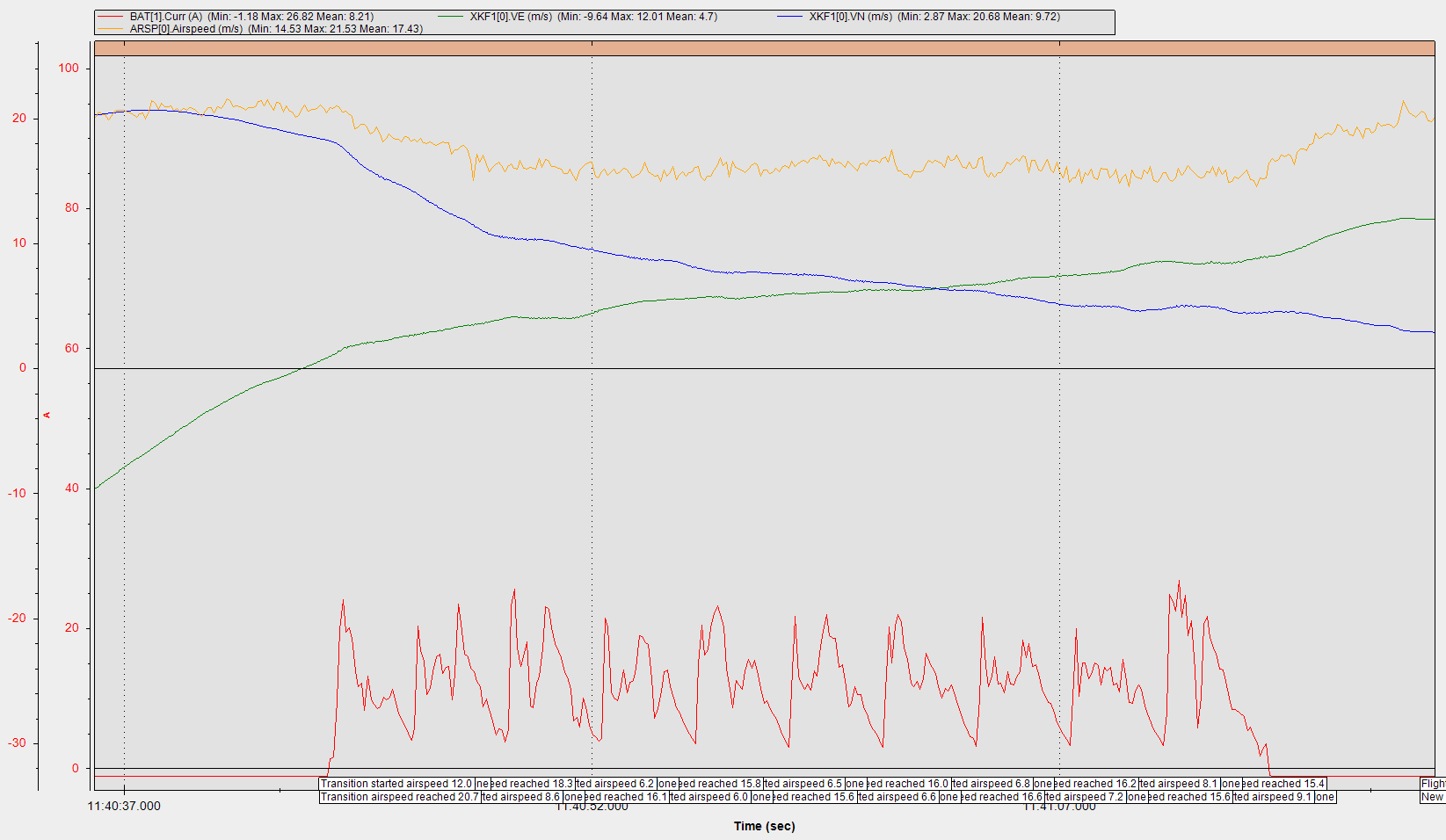
Shown is a small portion of the flight when the VTOL motors activate. As you can see, neither the airspeed nor the hypotenuse of the EKF speeds dips below 12 m/s. However, the AP reads a low speed and activates VTOL motors momentarily.
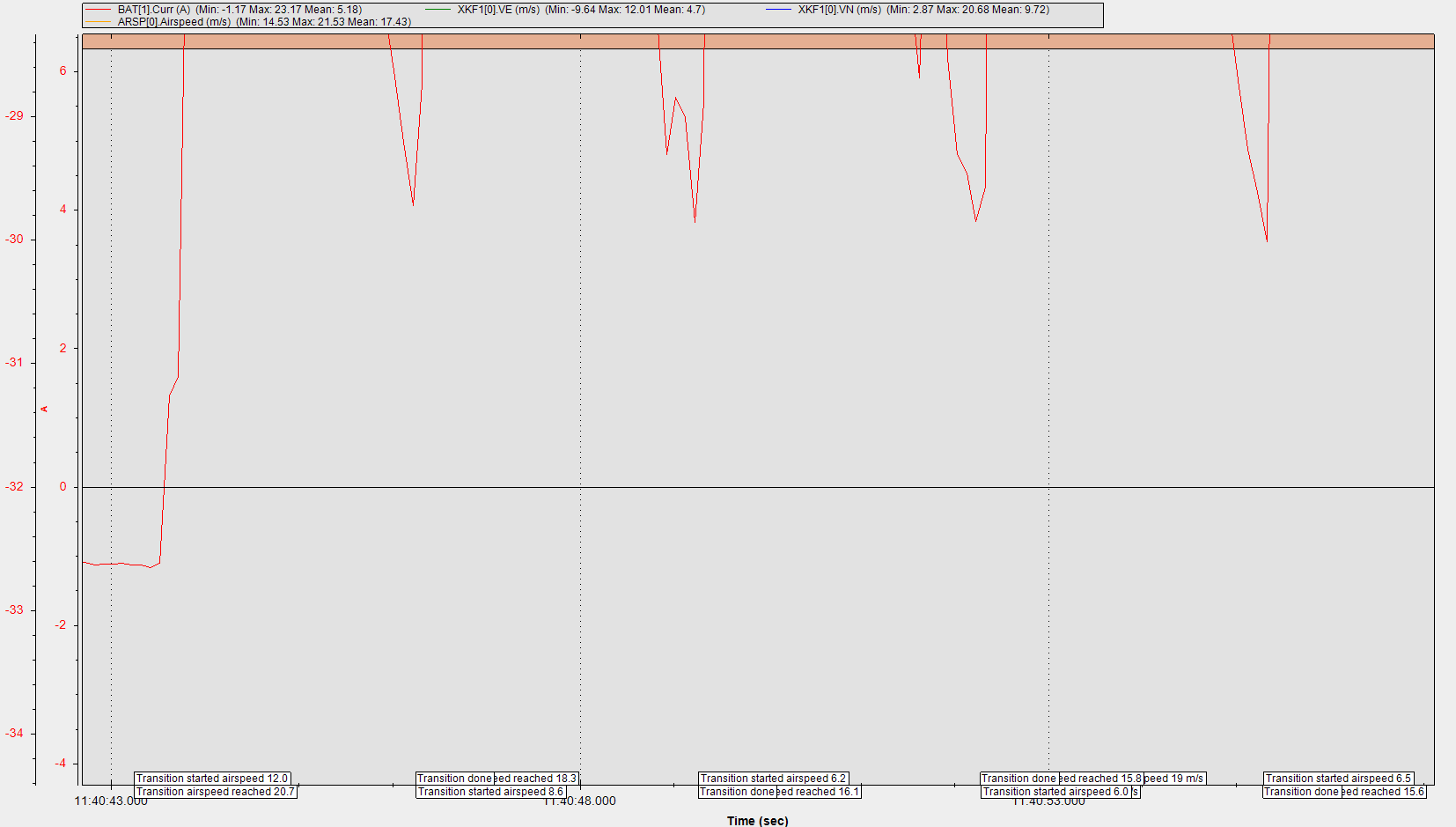
Zoomed in, you can see that the aircraft repeatedly goes through a cycle of reading a false speed, turning on VTOL motors, correcting about 0.004 seconds later, and completing “transition”. This goes on for about 30 seconds. In other flights, the time of this behavior was shorter but the current peaks were higher.
There are two problems here. One is that the speed being read is incorrect. The other is that the Q_Assit_Delay parameter is being ignored.
The logs are available here:
I posted about an EKF problem a few days ago which may be related:
I’ve checked my sensors, everything looks clean as far as I can tell. If anyone knows about why this might be happening and if it’s related to the Arduplane version I’m running, please let me know! Thank you!