Sure I will do these changes and will get back to you
I did the flight test after uploading the files upto 18th as you said I had to change the notch_filter from ESC Telemetry to Throttle as I don’t have any ESC Telemetry data available and I set takeoff_rpm from 1000 to 0 because I don’t have RPM data
Log of Last Flight: Log
There is something wrong with ESCs firmware configuration or their connection.
DShot600 supports RPM telemetry. That is one of the reasons people use that protocol.
So, Is that issue is because of I don’t have RPM Telemetry
I don’t think so because in the previous version of frame it was working absolutely fine
You need to fix that issue before you can continue.
Read How to methodically configure and tune any ArduCopter section 1.2 and 2.8
In the past when it flew “correctly” who evaluated that correctness? Probably you, that do not have experience and never flew a properly configured and tuned drone. Or have you?
I will look at the logs once you get ESC telemetry working.
When this is tuned you will get something that you can safely and responsibly sell to other people, it will no longer be a hobby toy.
Ok then I will figure out the ESC Telemetry thing first
You are not configured properly for Bdshot on the main outputs hence no telemetry.
Change these and reboot.
BRD_IO_DSHOT,1
MOT_PWM_TYPE,5 (Dshot600 will not work on the Cube Orange Main outputs)
Then after connecting to Mission Planner look at the Banner message on the messages screen and confirm you have Dshot for the outputs you are using.
Then make a short flight and review the log yourself to determine if ESC RPM is present.
BTW-Your GPS is performing very poorly. You can’t function with 6 satellites and an Hdop >1
1 Like
Let me explain you how exactly I configured
Hardware used:
- OrangeCube+ with mini carrier board
- DYS Aria 60A 4in1 ESC
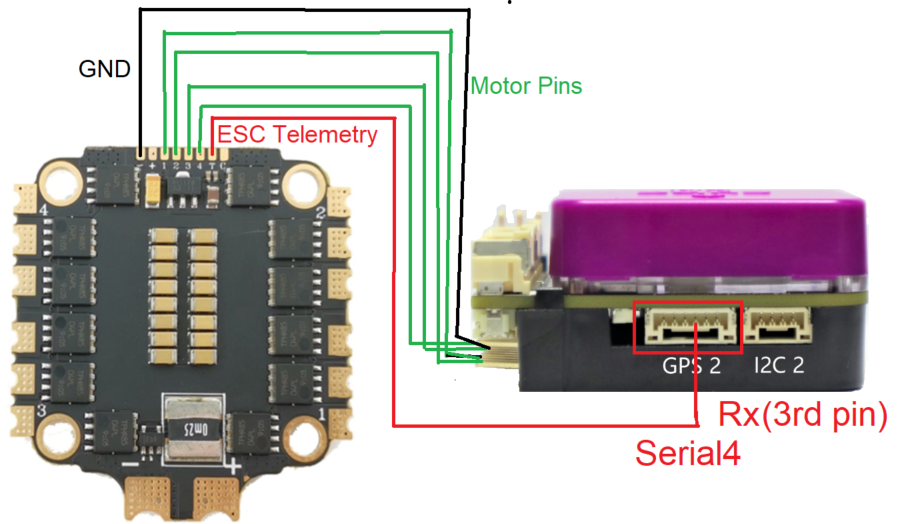
Connections
Parameters
SERIAL4_BAUD,115
SERIAL4_OPTIONS,16
SERIAL4_PROTOCOL,16
MOT_PWM_TYPE,6 (DShot600)
As I know in mission planner esc1_rpm, esc1_volt should show if the is autopilot is receiving esc telemetry
@dkemxr I know my gps is performing poor I did that flight in a not so open area
There are lots of thing that needed to be fixed you guys are my hope for that
What firmware is this ESC using? BLHeli_32, BLHeli_S, something else?
On that picture that is not a CubeOrange, it is a cubePurpule.
You need to connect and configure your 4 DSHOT600 ESCs on to “Aux Out 1 …4” instead of “Main out 1… 4”
https://ardupilot.org/copter/docs/common-dshot-escs.html#configure-the-servo-functions
But do not change the parameter with Mission Planner, change them with the methodic configurator.
And I now added this section to the documentation:
- The Reason changed field is extremely important because:
- if forces you to think, causing rational decisions instead of impulsive ones
- justifies your decisions on a vehicle certification process required in most countries
- allows for someone else to see if you know what you are doing
- allows for someone else (or yourself after a few weeks) to understand your rationale
1 Like
@dkemxr according to his vehicle_components.json file he is using “BLHeli32 Version”: 32.10 connected to serial port6
On the picture above it is connected to serial4.
So the information is incorrect and/or inconsistent.
1 Like
But mine is Cube orange+ mounted on mini carrier board
@amilcarlucas I apologize for the steps taken by me in configuration I am still learning this tech by doing and with your help
After your reply on fixing the esc telemetry issue first I thorougly studied about how to fix that issue I got to know this serial4 thing and telemetry pin in esc
because before that I just connected motor wires and gnd wire
If in fact they are BLHeli_32 ESC’s refer to my previous email and set those parameters. You want ESC RPM from Bdshot not serial telemetry.
1 Like
You should use this firmware version:
https://firmware.ardupilot.org/Copter/stable-4.5.4/CubeOrangePlus-bdshot/
The last log he posted shows he is using that firmware. But, with no regard for configuration.
Is that I will get telemetry data from the motor signal pins only, I thought I have to connect the telemetry pin in order to get the esc telemetry Refering to this discussion
Now the very first step I have to do as @amilcarlucas said to connect motor pins to aux pins
and then with RPM data i have to do a flight test then logs
am I missing something?
The Aux pins give you RPM information and nothing else, the RX pin will give you voltage, current and temperature data as well.
You want both.
No, not missing anything. Update the .zip file and correct them as much as possible. And do not forget reason changed this time.
1 Like
I don’t want to work at cross purposes here with @amilcarlucas but you don’t need to use Aux outputs for bi-directional Dshot, which you want whether you have serial ESC telemetry or not. If you leave them on the main outputs and use the parameters I posted you will have Bdshot supplied RPM. If you move them to the AUX outputs you would need to change the Bdshot bitmask.