No, I didn’t copy any of the old assignments in. I created an entirely new model, unrelated to the models that were already listed on the transmitter.
Ok, than you should have all switches/channels at your disposal. You can also use a switch assigned to another function right now, because you only need it one time.
Great, thank you!
So after selecting “Learn Cruise” for RC7 Opt and saving the parameters, do I just start the learning process then?
These are the steps in Mackay’s video, but he went over that rather fast, so I’m not sure what else I need to do and how.
Thank you for your patience with me!
There is not much to it. I would start with speed/throttle tuning, since cruise learning usually does most of the required tuning. Set GCS PID mask to throttle, select “Tuning” and then “pidachieved” and “piddesired” to see the graphs in Missionplanners Data screen. Then tune atc_speed_p and atc_speed_i. Feedforward is not needed as this is covered by the cruise throttle/speed setting.
Follwing the method of checking the maximum acro_turn_rate by letting the vehicle do a full throttle, full steering turn in manual mode and note the pidachieved value, does not work for any of my rovers. They are all much to fast for this and skid out of control or roll over. I usually set an acro_turn_rate that seems reasonable and tune the steering to that value.
1 Like
Thank you for this explanation, Sebastian!
I will try doing this as soon as I can, and I will let you know if I managed to succeed.
Okay, so I tried cruise learning just now. I drove with a little less than top speed, and then I switched the two pos switch SW3. Unlike in Mackay’s video, I do not get a message on the screen that a cruise speed and cruise throttle has been registered.
Looking at the standard parameters, CRUISE_SPEED is 2.0 m/s, and CRUISE_THROTTLE is 50%. I’m not sure of these parameters to have changed in any way or form.
Would it be recommended to manually change the cruise speed to a desired lower value?
2.0m/s are still 7.2km/h, that’s too fast in my opinion. I need a lower speed so I have a chance of better control (and of chasing after the vehicle in case it behaves utterly unexpected). 
Thank you already in advance for your answer!
PS: I will do the speed/throttle tuning after I fine-tuned the cruise speed, as I would prefer to work on these tuning parameters with the desired lower speed.
You never learn if you don’t try.
Well, I just tried to change the parameter for the cruise speed manually, but I don’t think it had any effect. Maybe I’m having an error in thinking here, but when I set CRUISE_SPEED to 1.0m/s, the wheels didn’t move much slower … however, this might just be because I tested in manual mode, which doesn’t reflect the autopilot mode that the cruise speed is used for.
Cruise learning did not work. 2m/s and 50% throttle are the default values. Does switch 3 actually move the input of the channel you assigned cruise learning to? Did you do the radio calibration including this switch/input channel (no matter if it was assigned to a function in ardurover)?
Changing the cruise speed without knowing the corresponding throttle value will do nothing good. Ardurover
uses the knowledge of “this throttle results in this speed” for all other speed calculations, so entering two values that have nothing to do with each other is pointless.
Okay, that’s unfortunate.
I did the radio calibration for CH7 with QGroundControl so that shouldbe fine. And I did what Mackay did in the video, taking CH7 Opt and assigning Learn Cruise to it.
I’m not sure about most things here, but I will change the values back to default later.
As soon as you switch cruise learning on, Missionplanner should display a message in the HUD “Cruise learning started” or so. If this message does not appear, there is something wrong with the switch assignement.
1 Like
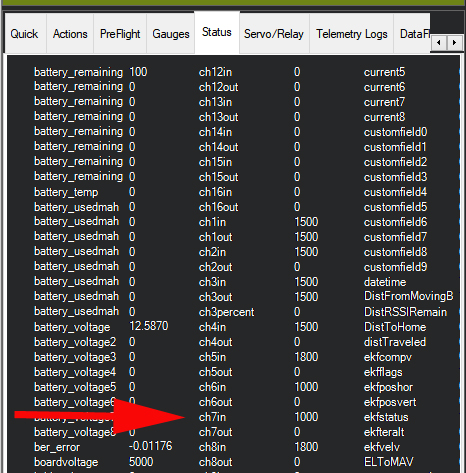
If it’s not displayed in the HUD check the RC Input on the Status screen of Mission Planner and see if this value goes high (>1800) when the switch you assigned is selected. if it doesn’t you have done something wrong with the switch assignment.
1 Like
@count74 @dkemxr Thank you very much for this, but I’m still stuck on the switch assignment part. 
I think I have asked earlier if and how I have to assign a switch. I now know that I have to assign a switch, but I’m still unsure as to how.
Is there a field in MissionPlanner that says “assign switch here”, do I have to assign with the transmitter only, or do I have to assign using both? Not knowing how to assign the switch is my current problem – Mackay doesn’t show it in the video about cruise learning, and I haven’t found a tutorial on the how-to of assigning the switch for cruise learning yet either.
If you could be so kind to explain this part to me, I would be extremely grateful.
Thank you already in advance for your help!
You have to assign the switch in the transmitter to channel 7. Then assign the Cruise Learning function to chan 7 via Mission Planner which it sounds like you have done.
Didn’t you assign a switch on the Transmitter for Arm/Disarm? If so this is the same process.
Thank you for explaining, Dave. Yes, I have SW8 assigned for Arm/Disarm. I really hope I can get it done today; Fridays are always very busy for me.
EDIT: Okay, I have checked the transmitter … under Gebereinst. on E07 I have SW8 assigned for Arm/Disarm.
I’m not familiar with Graupner radios I was just suggesting that the same process you used to assign a switch for Arm/Disarm be followed here for Cruise Learning.Just select a different channel and a different switch.
No, I was just wondering … when I’m connected to MissionPlanner via MAVLink, I can’t use SW8 anymore to do Arm/Disarm, it only works for fully manual and unconnected with telemetry. Since SW8 is connected to E07, it might be that this switch is already assigned to channel 7, and that I can use it for cruise learning. That was why I wrote that, sorry for not calrifying this earlier.
You must leave one switch (Sw8 on channel 7 at the moment?) assigned to arm/disarm and use another switch/channel to control cruise learning. The MX16 should have 8 channels. If you use channel 7 for arm/disarm and channel 8 for flightmodes, channel 5 and 6 should be free to use.
Yes, channel 5 and 6 are still free, that’s correct.
I assigned SW3 (two positions) to channel 6.
In MP, under Config –> Basic Tuning, there are RC7 Opt to RC10 Opt … how would I manage to make this work with my assigned switch now?
You can set everything in the full parameter list. RC6_Option is what you are looking for.
1 Like
Thank you, Sebastian! Will do that tomorrow. Wishing you a great weekend!