I am not able to get lidar working😔
Pixhawk Black Cube, Copter 3.6.9
pwm Input on PIN 15
Stop PIN 55
Power over ESC on Servo Rail
Sensor is working fine on px4 1.9.1 over qgroundcontrol🤷🏼♂️
I am not able to get lidar working😔
Pixhawk Black Cube, Copter 3.6.9
pwm Input on PIN 15
Stop PIN 55
Power over ESC on Servo Rail
Sensor is working fine on px4 1.9.1 over qgroundcontrol🤷🏼♂️
Me too as you. i can not configure lidar using serial
To my knowledge, ArduCopter can use both OS : NuttX and ChibiOS.
But with the latest version, NuttX is not anymore deployed. And I know that ChibiOS doesn’t include LidarLite V3 with PWM (but only with I2C).
So you have the choice to change from PWM to I2C (not really complicated, hard and soft), or to keep a version that is still using NuttX (and wait that ChibiOS is compatible with PWM for lidars)
Thank you @KiloNovemberDelta 
Seems I missed this advice 
Hardware Setup should be no Problem…
But Software. I will use 3.6.9 on Black Cube. There is a direct 4 PIN I2C Port. But how to set the I2C Adress in MP🤷🏼♂️
I have no clue🙈
@KiloNovemberDelta do you have a quick advice?
For the software part, it is quite straightforward. Just have to specify that you are using I2C into the parameters of ArduCopter.
What is the model of your lidar ?
I let you have a look here : http://ardupilot.org/copter/docs/common-rangefinder-lidarlite.html#setup-in-mission-planner
Just thank you:blush: @KiloNovemberDelta
I use GARMIN 2017 Model. I think its V3.
I have the same, and it is working with I2C without problem.
Let me know when you succeed to make it work 
@KiloNovemberDelta you saved my day😊
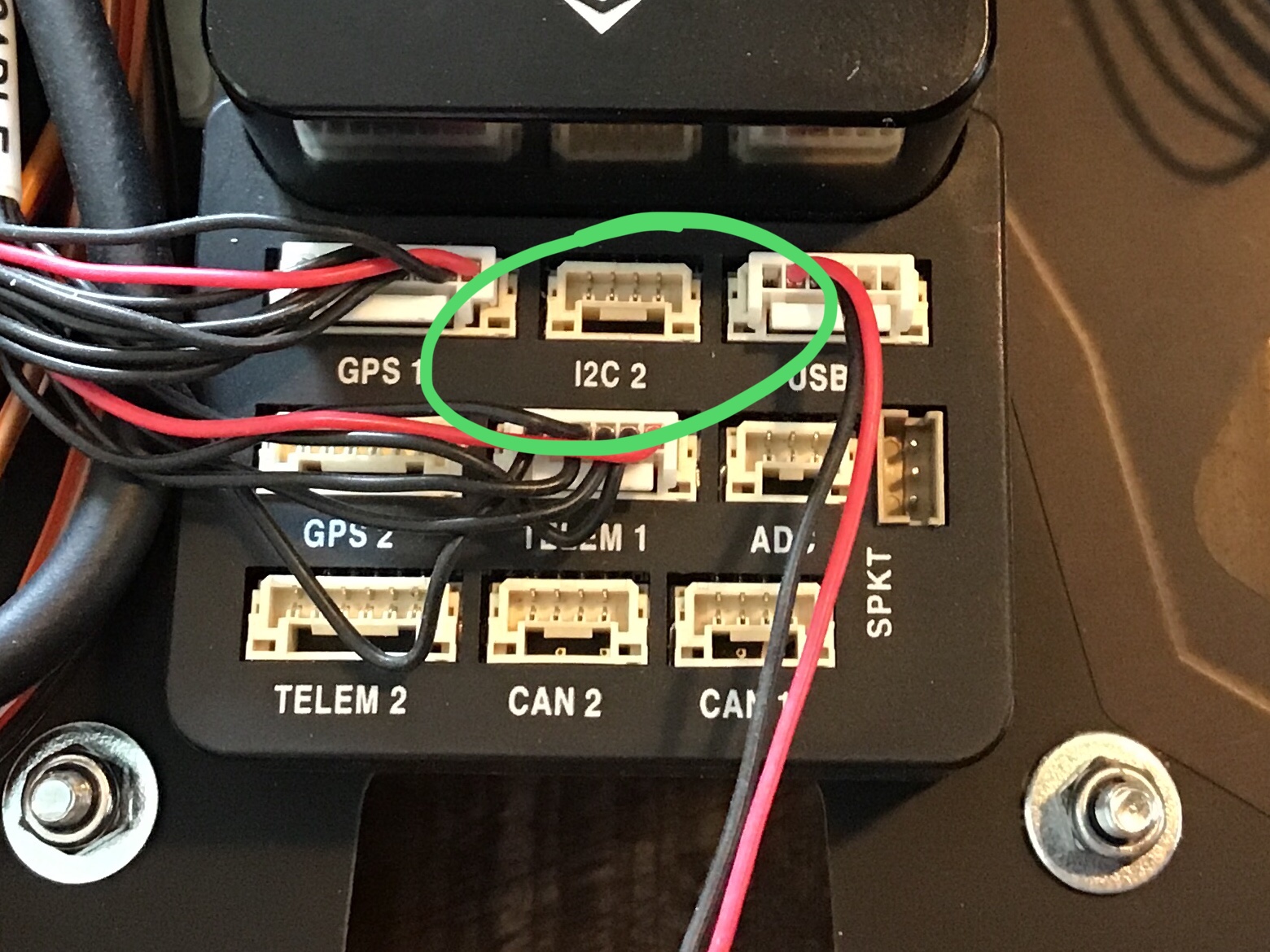
I just config a cable for I2C 2 as market on my picture…
Hope it will work
Is it need to power the Lidar extern or just use the 5V output of the I2C?
I recommand you to power the Lidar from an external source (like it is described here : http://ardupilot.org/copter/docs/common-rangefinder-lidarlite.html#connecting-to-the-pixhawk-via-i2c) and add a 680uF condensator between the GND and the 5V of the Lidar.
With this configuration, DO NOT plug the 5V between the lidar and the pixhawk
Thank you for all your advice @KiloNovemberDelta👍🏻
Good to know that this community is real😊
@borhanreo do you think you can solve your connection Issue?
@Matthias Not Now. But i am trying to solve that problem.
@KiloNovemberDelta is it need to define RNGFND_ADDR?
sorry… another question. SDA to SDA or crossed?
SDA to SDA, SCL to SCL for I2C protocol
https://robot-electronics.co.uk/i2c-tutorial
For the parameter RNGFND_ADDR, I haven’t touch it for now.
BTW, for LidarLight V3, RNGFND1_TYPE=15 (LidarLiteV3-I2C)
You can check it here : http://ardupilot.org/copter/docs/parameters.html#rngfnd1-type-rangefinder-type
SOLVED!
Thanks to @KiloNovemberDelta:+1:t2:
Reply my own Question, SDA to SDA, SCL to SCL…
RNGFND_ADDR is set to 0.
I2C 2 port on Pixhawk black cube working for me with Lidar Lite V3 extern powered by 5V BEC. But make sure not to slave power to the I2C port as @KiloNovemberDelta told!!!
RNGFND_TYPE 15 for LidarLiteV3 I2c is important!
RNGFND_STOP_PIN -1
RNGFND_PIN -1
Great !
Good luck for your project !